







LINKERBOT Linker Hand L6 Роботизована рука, 6 ступенів свободи, CAN, шарнірний привід, сила захвату 50Н, повторюваність ±0,2 мм
LINKERBOT Linker Hand L6 Роботизована рука, 6 ступенів свободи, CAN, шарнірний привід, сила захвату 50Н, повторюваність ±0,2 мм
LINKERBOT
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
LINKERBOT Linker Hand L6 - це маневрена роботизована рука, розроблена для точного маніпулювання. Вона має 6 ступенів свободи (DoF) та 11 суглобів (6 активних + 5 пасивних) з ланцюговою передачею та інтерфейсом управління CAN. Структура, показана на зображеннях продукту, підкреслює повністю металеві пальці, зносостійкий силікон на кінчиках пальців, тактильні датчики тиску на п'яти пальцях, індикаторні лампи, гумову накладку на половину долоні, що запобігає защемленню, та високоточний електричний циліндр прямого приводу.
Ключові особливості
- 6 DoF маневрене маніпулювання; 11 суглобів (6 активних + 5 пасивних).
- Ланцюгова передача з управлінням по CAN-шині.
- Точність повторного позиціонування: ±0.2мм.
- Сила: максимальна сила на кінчику великого пальця 10Н; максимальна сила на кінчику чотирьох пальців 8Н; максимальна сила захоплення п'яти пальцями 50Н.
- П'єзорезистивний масив тактильних сенсорів з п'яти пальців для вимірювання контакту/тиску.
- Елементи дизайну: повнометалеві пальці, зносостійкі силіконові наконечники, індикаторна лампочка, гумова накладка для запобігання защемленню.
- Компактна &і агільна компоновка; багатосенсорна система (включаючи камери та електронну шкіру) та інтеграція пристрою з хмарою, як показано на зображеннях продукту.
Для продажу та технічної підтримки звертайтеся [email protected] or відвідайте https://rcdrone.top/.
Специфікації
| Параметр | Значення |
|---|---|
| Кількість ступенів свободи (DoF) | 6 |
| Кількість суглобів | 11 (6 активних + 5 пасивних) |
| Режим передачі | Передача через з'єднання |
| Інтерфейс управління | CAN |
| Вага | 623.5г |
| Максимальне навантаження | 28кг |
| Робоча напруга | DC24V±10% |
| Статичний струм | 0.2A |
| Середній струм (рух без навантаження) | 0.75A |
| Максимальний струм | 1.4A |
| Точність повторного позиціонування | ±0.2мм |
| Максимальна сила тиску великого пальця | 10Н |
| Максимальна сила тиску чотирьох пальців | 8Н |
| Максимальна сила захоплення п'яти пальців | 50Н |
Продуктивність руху
| Частина руху | Кутовий діапазон (°) | Швидкість руху (°/с) |
|---|---|---|
| Основа великого пальця | 57 | 152.82 |
| Основа вказівного пальця | 72.30 | 213.27 |
| Основа середнього пальця | 72.90 | 208.29 |
| Основа безіменного пальця | 73.10 | 202.49 |
| Основа мізинця | 72.60 | 201.11 |
| Кінець великого пальця | 69.90 | 192.84 |
| Кінець вказівного пальця | 64.60 | 192.84 |
| Кінець середнього пальця | 65.10 | 185.32 |
| Кінець безіменного пальця | 66.90 | 185.32 |
| Кінець мізинця | 66.70 | 184.76 |
| Бокове коливання великого пальця | 80 | 235.29 |
| Час відкриття та закриття | - | 0.35с |
Датчики
| Параметр | Специфікація |
|---|---|
| П'єзорезистивний масив | 6*12 |
| Площа навантаження датчика | 9.6*14.4мм |
| Сила спуску | 5г |
| Діапазон вимірювання | 20Н |
| Термін служби | 100,000 циклів |
| Частота передачі даних | 200FPS |
| Діапазон значень | 0~4095 |
Розміри зовнішнього вигляду
| Визначення | Параметр (мм) |
|---|---|
| Довжина від кінчика середнього пальця до основи долоні | 190.7 |
| Максимальна ширина долоні | 121 |
| Довжина від кінчика великого пальця до основи долоні | 134.3 |
| Висота зап’ястя | 9.5 |
| Діаметр зап’ястя | 60 |
Що входить до комплекту
- USB‑to‑CAN налагоджувальний кабель x1
- З’єднувальний кабель XT30 (2+2) x1
- Блок живлення x1
- Кабель живлення x1
- Linker Hand L6 x1
Застосування
- Точне захоплення та обробка об'єктів
- Захоплення та маніпуляція інструментами
- Завдання з підбору та розміщення компонентів
Посібники
Посібник користувача Linker Hand L6 (PDF)
Деталі


Високопродуктивна дексетрична роботизована рука з 6 ступенями свободи. Має компактну маневреність, багатосенсорну систему та інтеграцію пристрою з хмарою для точного контролю, адаптації до навколишнього середовища та налаштування без коду через бібліотеку навичок у хмарі.



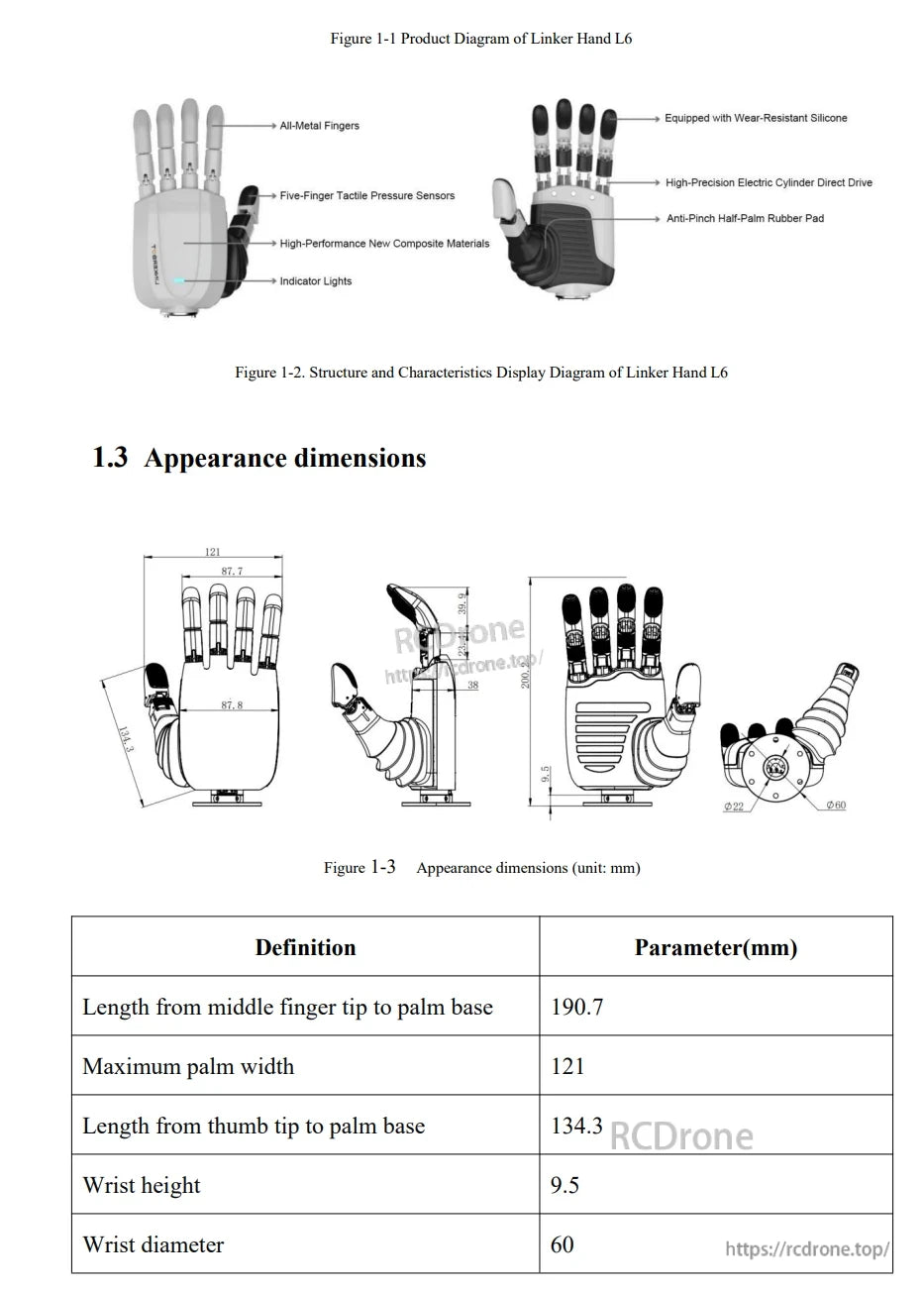
Linker Hand L6 має металеві пальці, тактильні датчики, зносостійкий силікон, електричний циліндровий привід та гумову накладку для запобігання защемленню. Довжина пальця: 190.7 мм; ширина долоні: 121 мм; діаметр зап’ястя: 60 мм.
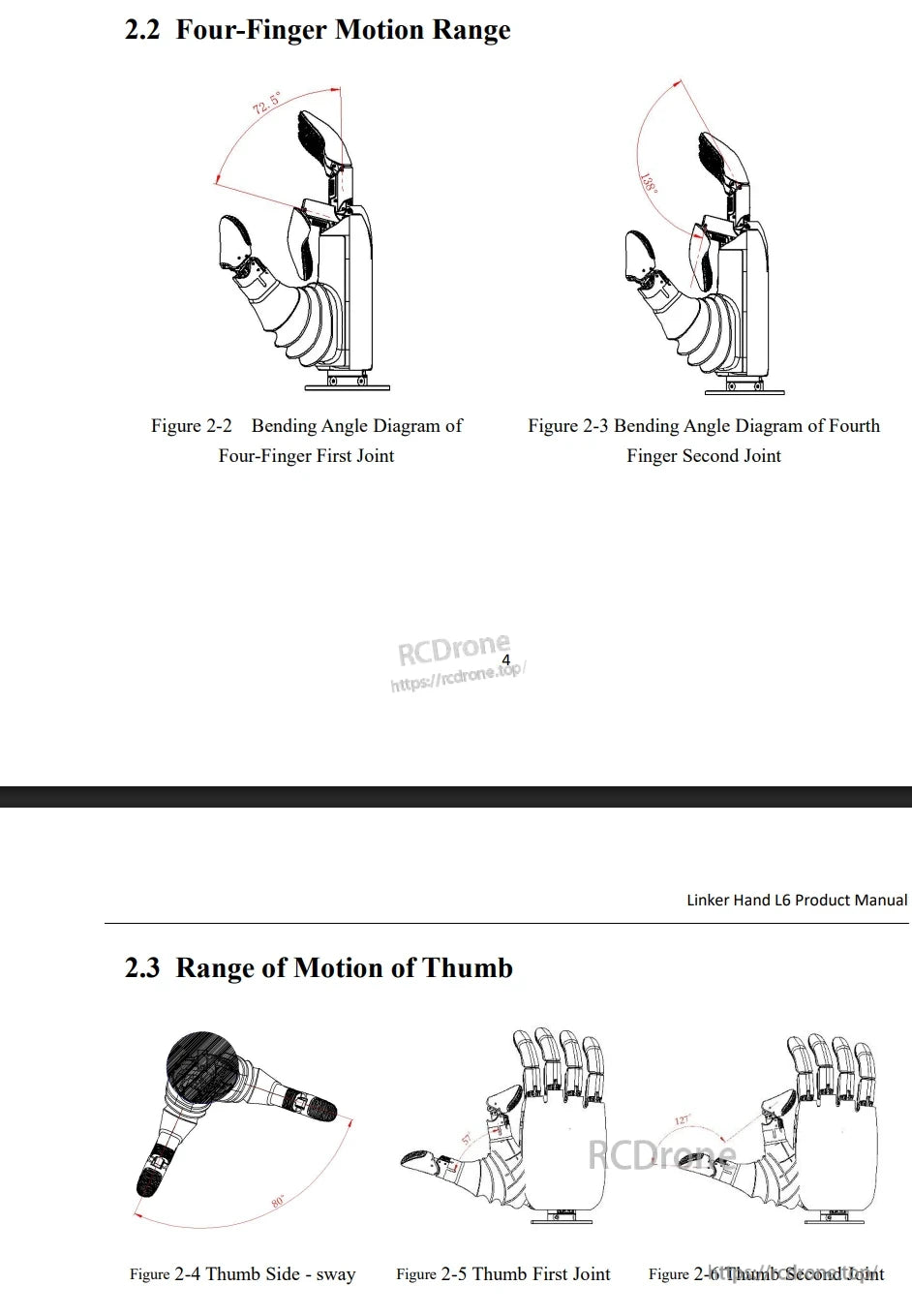
Діапазони руху суглобів пальців і великого пальця: перший суглоб чотирьох пальців 72.5°, другий суглоб 138°; бічний рух великого пальця 80°, перший суглоб 57°, другий суглоб 127°.
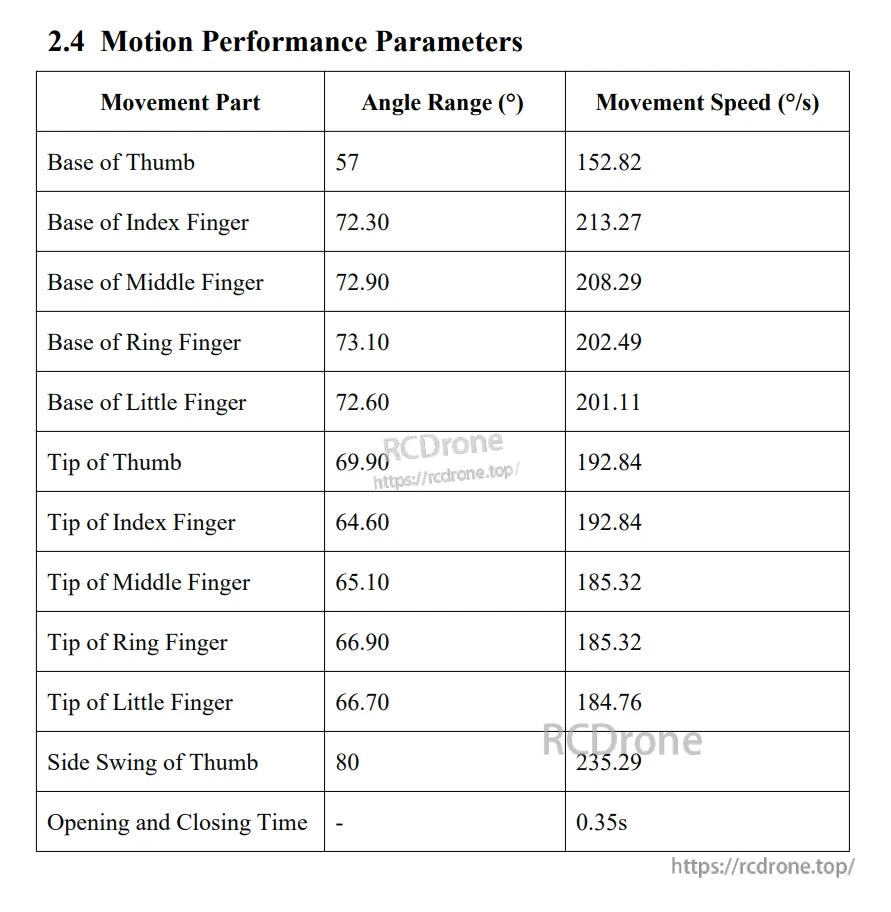
Параметри руху пальців роботизованої руки: коливання великого пальця на 235.29°/с, відкриття/закриття за 0.35 секунди — демонструючи точну артикуляцію з детальними діапазонами кутів суглобів і швидкостями.
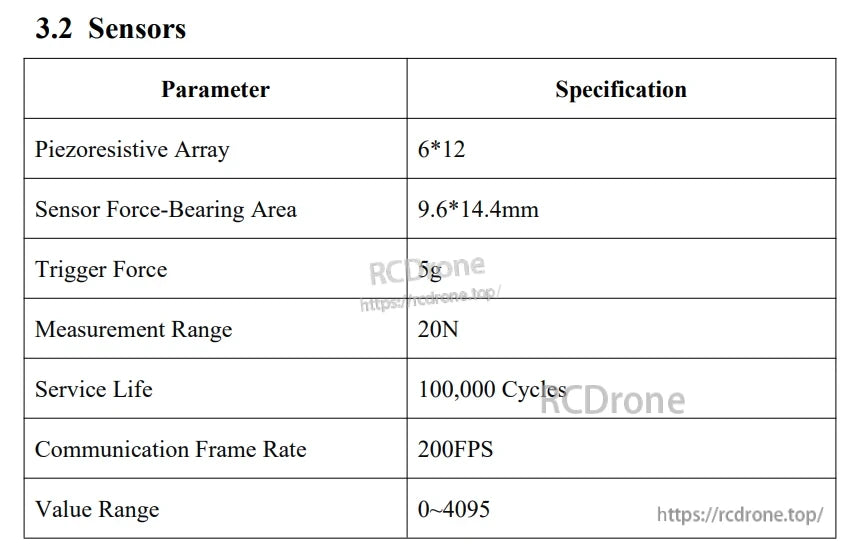
Технічні характеристики датчиків: масив 6x12, площа 9.6x14.4 мм, спрацьовування 5g, діапазон 20N, 100k циклів, 200FPS, діапазон значень 0-4095.
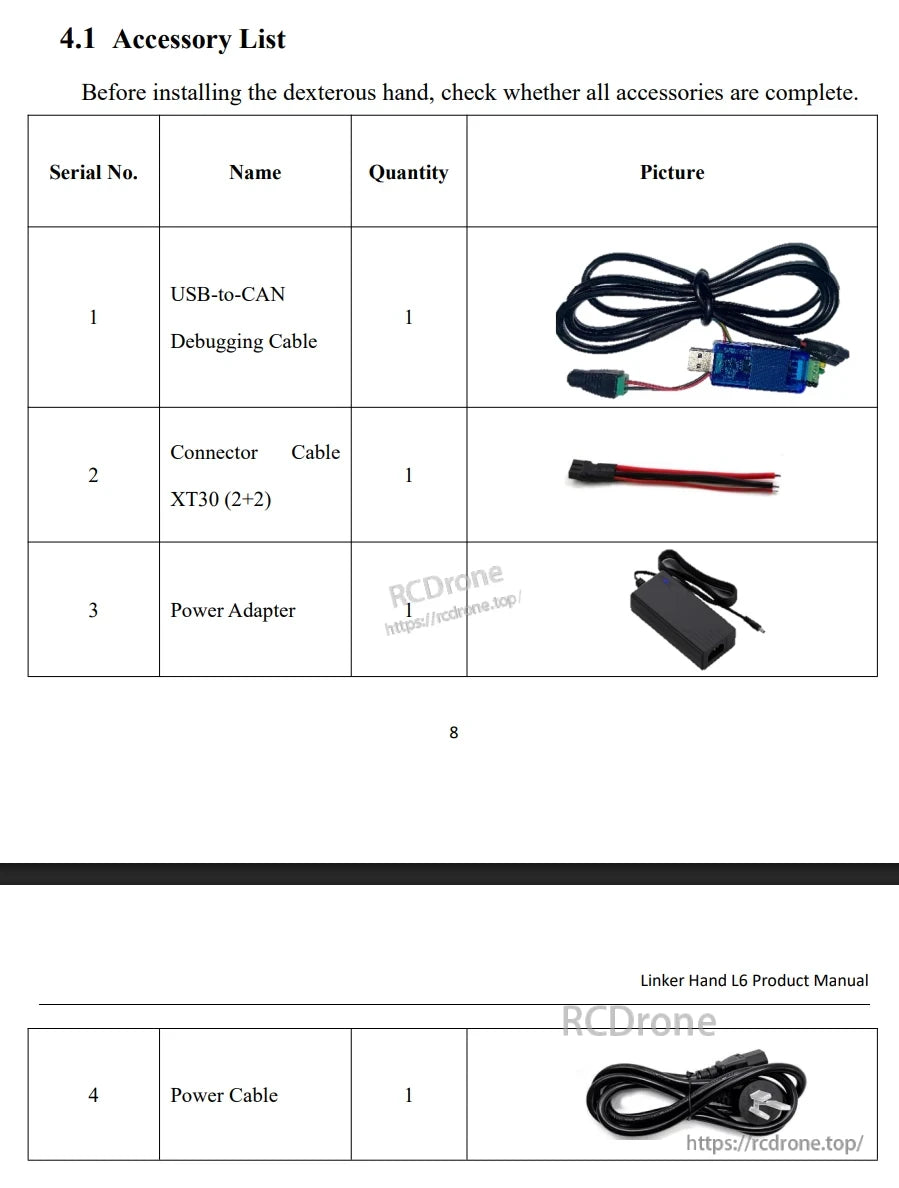
Список аксесуарів для Linker Hand L6: USB-to-CAN кабель, XT30 роз'єм, блок живлення та живильний кабель. Перевірте повноту перед установкою.
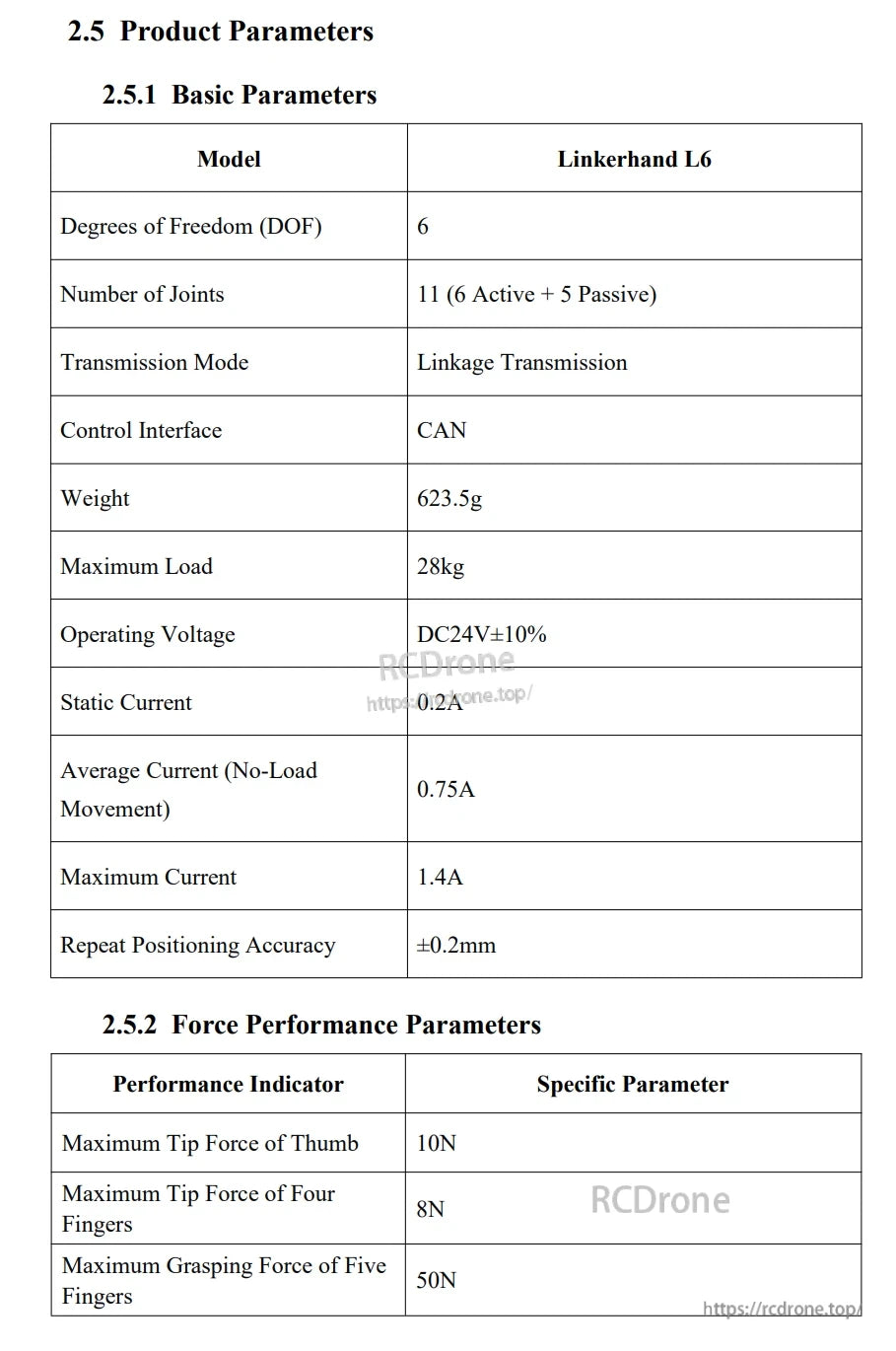
Роботизована рука Linkerhand L6 має 6 ступенів свободи, 11 суглобів, CAN-керування, важить 623,5 г, витримує максимальне навантаження 28 кг, працює на DC24V±10%, забезпечує точність ±0,2 мм і забезпечує до 50N сили захоплення.
Related Collections







