







LINKERBOT Linker Hand O6 Роботизована рука, 6 ступенів свободи, 11 зчленувань, CAN/RS485, сила захвату 130Н, точність ±0,2мм, DC24V±10%
LINKERBOT Linker Hand O6 Роботизована рука, 6 ступенів свободи, 11 зчленувань, CAN/RS485, сила захвату 130Н, точність ±0,2мм, DC24V±10%
LINKERBOT
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
LINKERBOT Linker Hand O6 - це роботизована рука, розроблена для компактної інтеграції та точного маніпулювання. Вона забезпечує 6 ступенів свободи з 11 суглобами (6 активних + 5 пасивних), черв'ячну передачу для стабільного приводу, управління CAN/RS485 та опціональне тактильне відчуття. Декстерна структура забезпечує до 130N сили захоплення п'яти пальцями з точністю повторного позиціонування ±0.2мм при робочій напрузі DC24V±10%. Легка конструкція вагою 370г та малий розмір підтримують обробку логістики, промислову збірку та сценарії захоплення неправильної форми.
Ключові особливості
Компактний &та агресивний
Компактний структурний дизайн зменшує навантаження на обладнання, одночасно підвищуючи гнучкість для точного захоплення в обмежених просторах.
Висока міцність
Виготовлено з алюмінієвого сплаву для легкості, міцності та стійкості до зносу, що підтримує стабільну роботу в довгостроковій перспективі.
Інтеграція пристрою з хмарою
Інтеграція пристрою з хмарою дозволяє швидко впроваджувати рішення через бібліотеку навичок на базі хмари з спрощеним управлінням та налаштуванням.
Специфікації
| Модель | LINKERBOT Linker Hand O6 |
| Кількість ступенів свободи (DoF) | 6 |
| Кількість суглобів | 11 (6 активних + 5 пасивних) |
| Режим передачі | Передача черв'ячного типу |
| Інтерфейс управління | CAN/RS485 |
| Вага | 370г |
| Максимальне навантаження | 30кг |
| Робоча напруга | DC24V±10% |
| Точність повторного позиціонування | ±0.2мм |
| Тактильний датчик | Додатково |
| Максимальна сила натискання великого пальця | 28Н |
| Максимальна сила чотирьох пальців | 33Н |
| Максимальна сила захоплення п'яти пальців | 130Н |
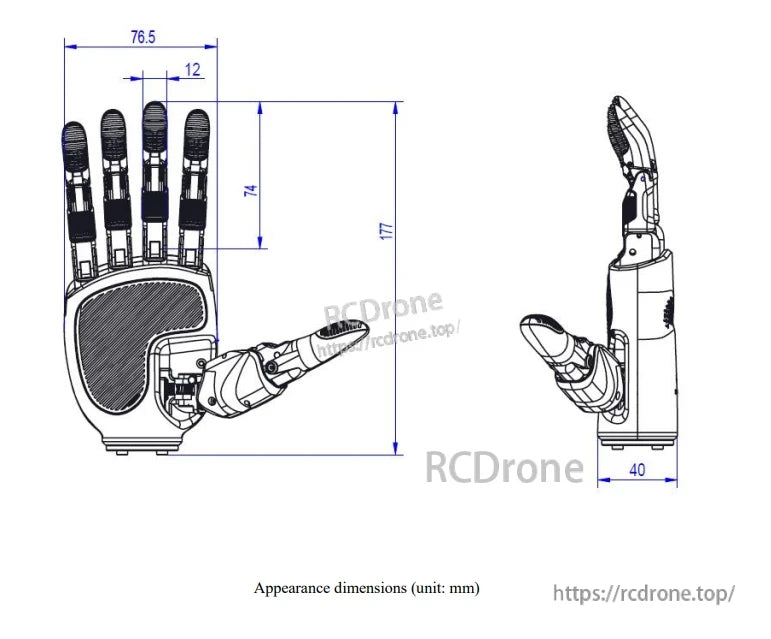
| Розміри (зовнішній вигляд) | Висота 177мм; Ширина 76.5мм; Товщина 40мм |
Діапазон руху
| LF2, RF2, MF2, FF2 (Згинання) | 90° |
| LF1, RF1, MF1, FF1 (Згинання) | 80° |
| ВЕЛИКИЙ ПАЛЕЦЬ1 (Згинання) | 55° |
| ВЕЛИКИЙ ПАЛЕЦЬ2 (Згинання) | 30° |
| ВЕЛИКИЙ ПАЛЕЦЬ3 (Бокове - хитання) | 88° |
Що входить у комплект
- USB-to-CAN налагоджувальний кабель ×1
- З'єднувальний кабель XT30 (2+2) ×1
- Блок живлення ×1
- Кабель живлення ×1
- Linker Hand O6 x1
Для продажу або технічної підтримки, звертайтеся [email protected] or відвідайте https://rcdrone.top/.
Застосування
- Обробка логістики та передача матеріалів
- Промислова збірка та маніпуляція інструментами
- Стабільне захоплення нерегулярних форм та споживчих товарів
Посібники
Linker_Hand_O6_Product_Manual.pdf
Деталі

Linker Hand O6 пропонує 6 активних та 5 пасивних суглобів для точного, міцного захоплення. Компактний, міцний алюмінієвий дизайн підходить для логістики, збірки та нерегулярного захоплення. Має інтеграцію з хмарою для легкого навчання ШІ без кодування.


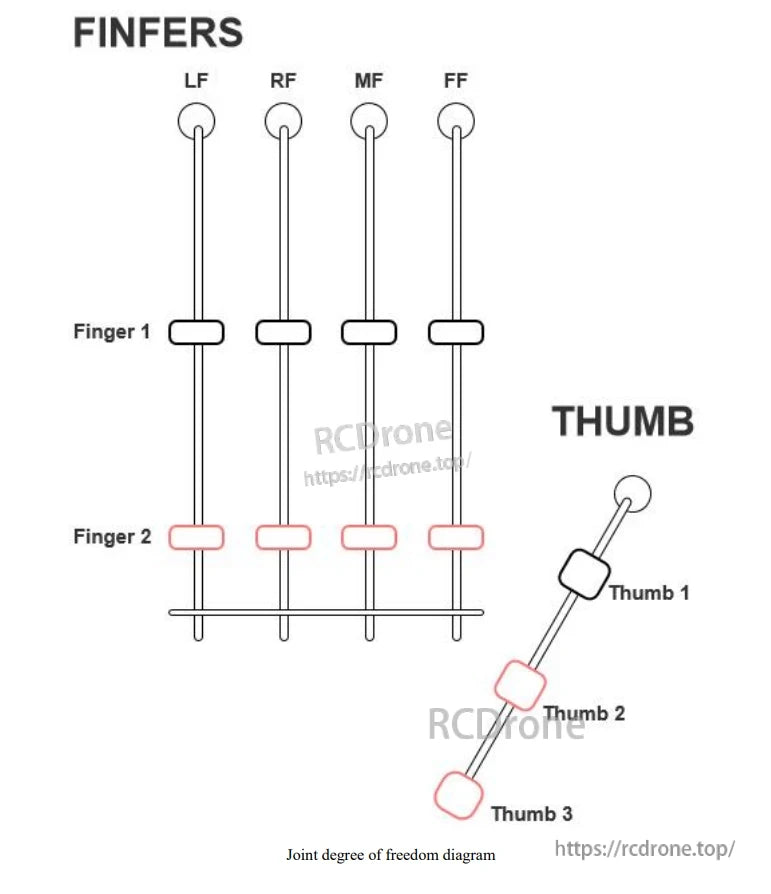
Діаграма ступенів свободи суглобів пальців та великого пальця
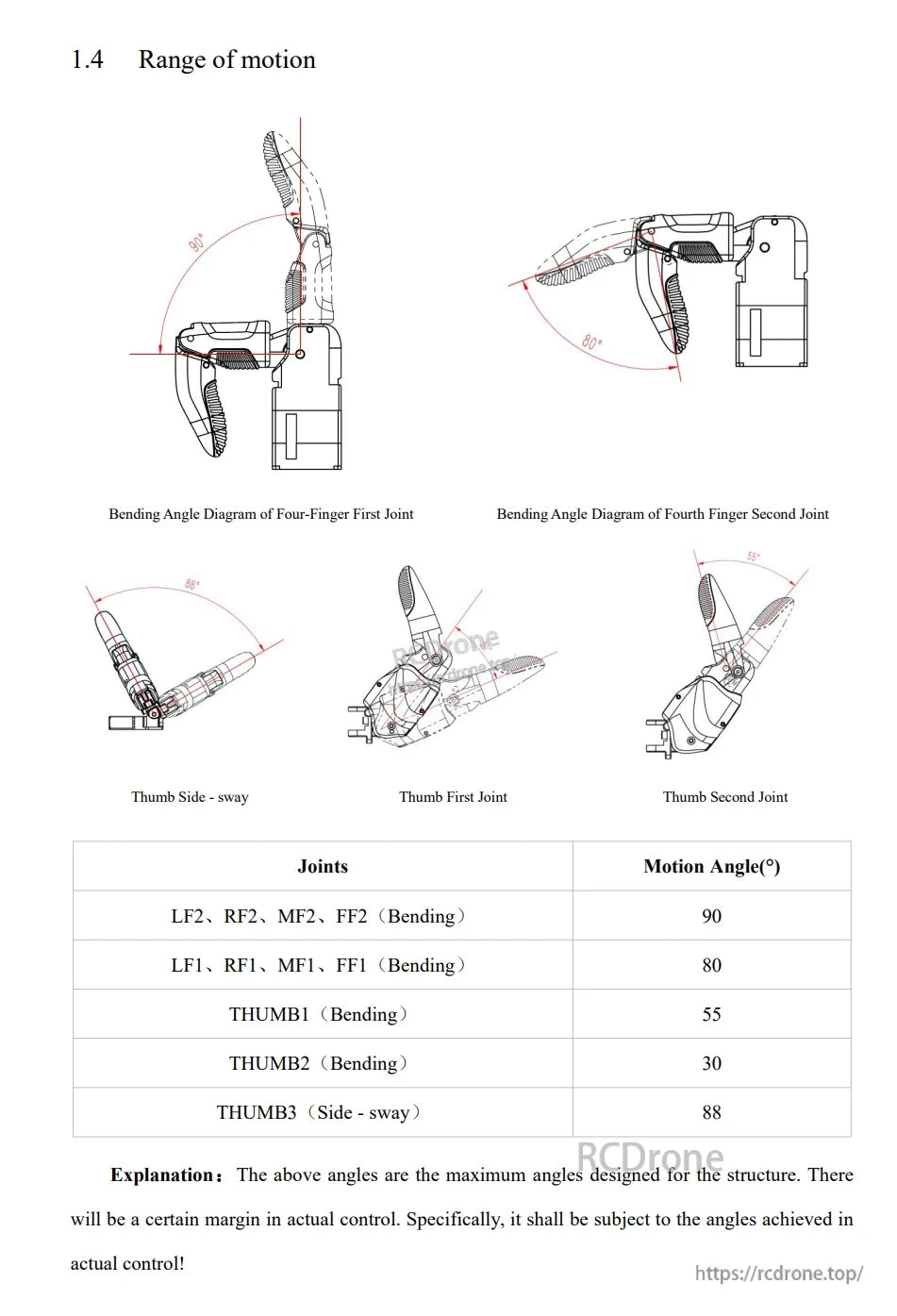
Пальці згинаються на 80–90°, великий палець згинається на 30–55°, а бічне коливання досягає 88°. Це максимальні кути, фактичне управління може трохи варіюватися.
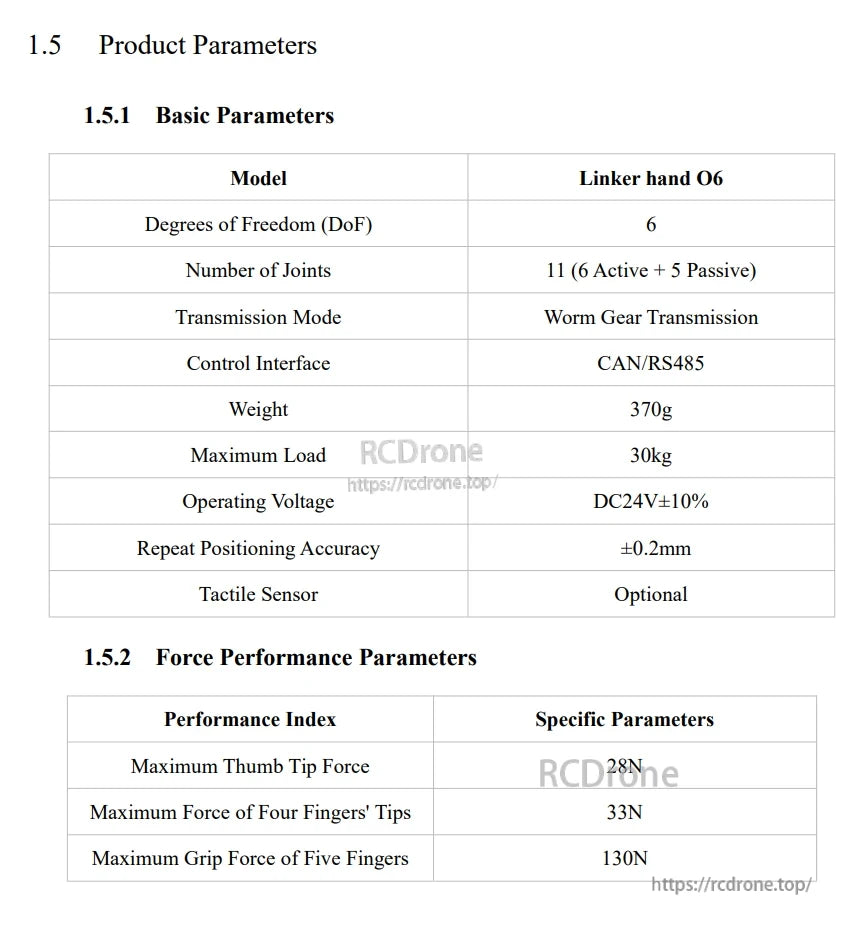
Роботизована рука Linker Hand O6 має 6 ступенів свободи, 11 суглобів, черв'ячну передачу, управління CAN/RS485, вага 370 г, витримує максимальне навантаження 30 кг, працює при DC24V±10%, точність ±0.2 мм та пропонує додаткові тактильні датчики з вказаними характеристиками сили.

Список аксесуарів для установки маневрової руки: USB-to-CAN кабель, XT30 роз'єм, адаптер живлення та силовий кабель — всі в кількості один.
Related Collections







