




Безщітковий двигун LKMTECH MG4005-V2 з редуктором 1:10 PG4210, RS485/CAN, 18-бітний енкодер
Безщітковий двигун LKMTECH MG4005-V2 з редуктором 1:10 PG4210, RS485/CAN, 18-бітний енкодер
LKMTECH
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Модуль LKMTECH MG4005-V2 є безщітковим мотором, призначеним для активації робототехніки. Він інтегрує планетарний редуктор PG4210 (1:10) та 18-бітний магнітний енкодер, з комунікацією через RS485 або CAN для замкнутого контролю моменту/швидкості/позиції.
Ключові особливості
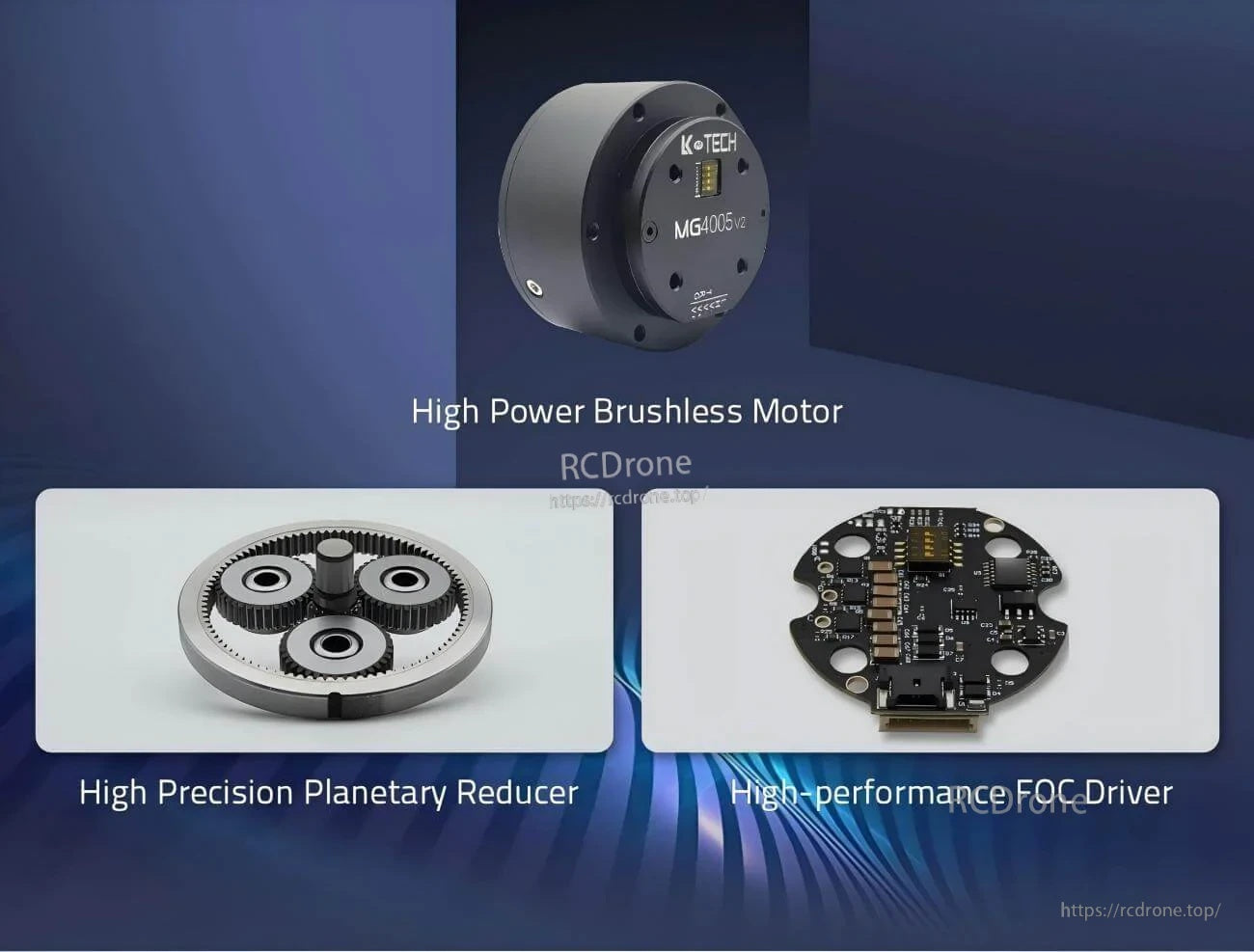
- Безщітковий мотор високої потужності
- Високоточний планетарний редуктор: зворотний хід ≤10 дуг. хв, співвідношення 1:10
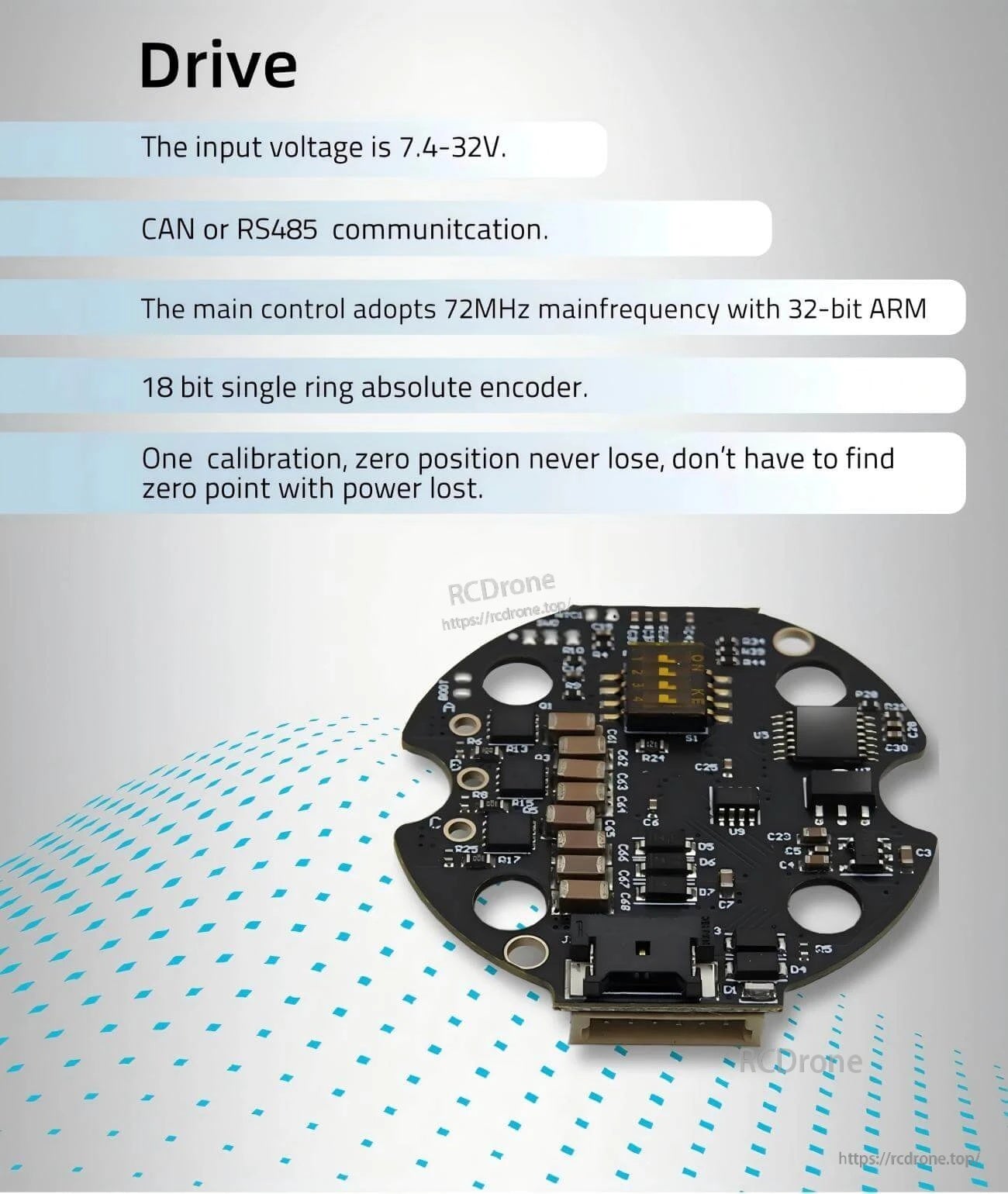
- 18-бітний абсолютний енкодер з одним кільцем; одна калібровка, нульова позиція зберігається після втрати живлення
- Комунікація: CAN або RS485
- Вхідна напруга живлення: 7.4-32V
- Головний контролер: основна частота 72MHz з 32-бітним ARM
- Підтримує PWM-вхід; оптимізований крутний момент двигуна для більш плавної роботи
- Програмне забезпечення для інструментів двигуна: налаштування параметрів, тестування та оновлення прошивки
- Підтримує платформи відкритого коду, такі як ПК, MCU, PLC, ICP та RPi
Технічні характеристики
| Назва товару | MG4005-V2 |
| Номінальна напруга | 24V |
| Максимальна швидкість | 320RPM |
| Номінальна швидкість | 255RPM |
| Номінальний крутний момент | 1N.m |
| Максимальний крутний момент | 2.5N.m |
| Номінальний струм | 1.8A |
| Максимальна потужність | 65W |
| Постійна швидкість | 106.3об/хв/В |
| Крутний момент | 0.06Н.м/А |
| Обертів | 28 |
| Тип обмотки | Y |
| Опір фази | 1.4Ω |
| Індуктивність фази | 0.5мГн |
| Полюси двигуна | 28 |
| Інерція ротора | 140гсм² |
| Температура двигуна | ТАК |
| Тип редуктора | PG4210 |
| Передатне співвідношення | 1:10 |
| Зазор | ≤10 дуг.хв |
| Номінальне навантаження підшипника | 1000Н |
| Вага двигуна | 154г |
| Рекомендувати привід | DF40 |
| Вхідна напруга приводу | 7.4-32V |
| Зв'язок | RS485 АБО CAN |
| Частота зв'язку | RS485:500Гц(115200bps)/CAN:2КГц(1Mbps) |
| Енкодер | 18-бітний магнітний енкодер |
| Швидкість передачі даних енкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Швидкість передачі даних (CAN) | 1M |
| Режим управління | Контур моменту (24КГц)/Контур швидкості (8КГц)/Контур позиції (4КГц) |
| Крива прискорення | Трапецієподібне прискорення |
Визначення інтерфейсу
| Інтерфейс | Примітка |
|---|---|
| A/L | RS485-A або CAN-L |
| B/H | RS485-B або CAN-H |
| V- | Негативне живлення |
| V- | Негативне джерело живлення |
| V+ | Позитивне джерело живлення |
| V+ | Позитивне джерело живлення |
| T | UART передавач |
| R | UART приймач |
| G | Сигнальний GND |
Застосування
- Гуманоїдні роботи
- Роботизовані руки
- Екзоскелети / носимі роботи
- Чотириногі роботи / робот-собака
- AGV транспортні засоби / AGV автомобіль
- ARU роботи
Посібники
Для підключення, інтеграції та підтримки після продажу, звертайтеся https://rcdrone.top/ або надішліть електронний лист на [email protected] .
Деталі

Розроблений для активації робототехніки, MG4005‑V2 поєднує в собі компактний безщітковий двигун і редуктор в одному модулі, що легко інтегрується.
Сумісний двигун, планетарний редуктор і плата драйвера допомагають спростити управління моментом, швидкістю та позицією в замкнутому контурі.
Комунікація CAN або RS485 та широкий діапазон вхідної напруги 7.4–32V роблять інтеграцію простою для загальних контролерів робототехніки.

Порівняння версій підкреслює оновлення енкодера MG4005‑V2 до 18‑бітного абсолютного зворотного зв'язку та підтримку PWM-входу.
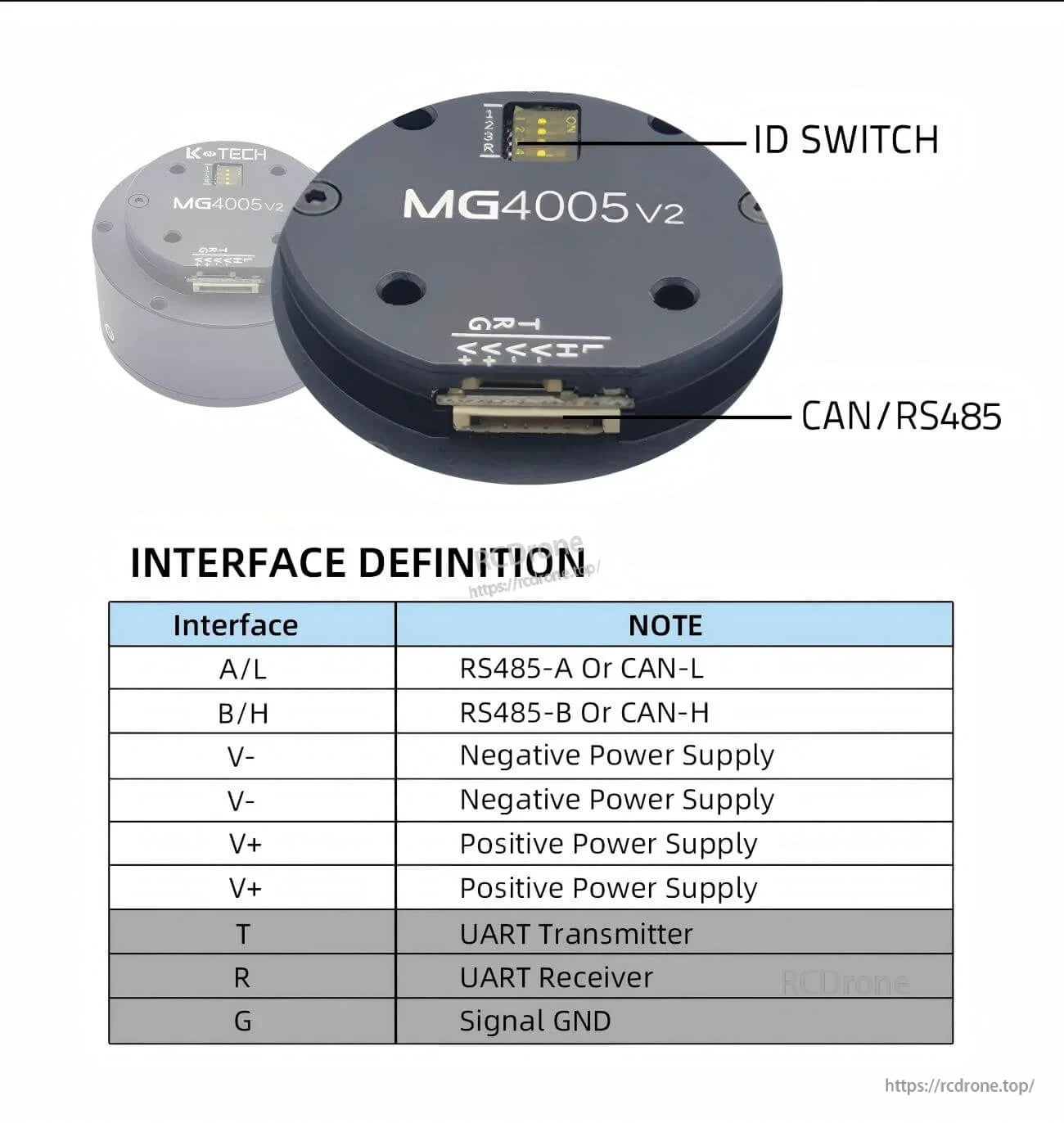
Визначення контактів і вбудований перемикач ID допомагають спростити підключення багатосистемних осей та конфігурацію шини.

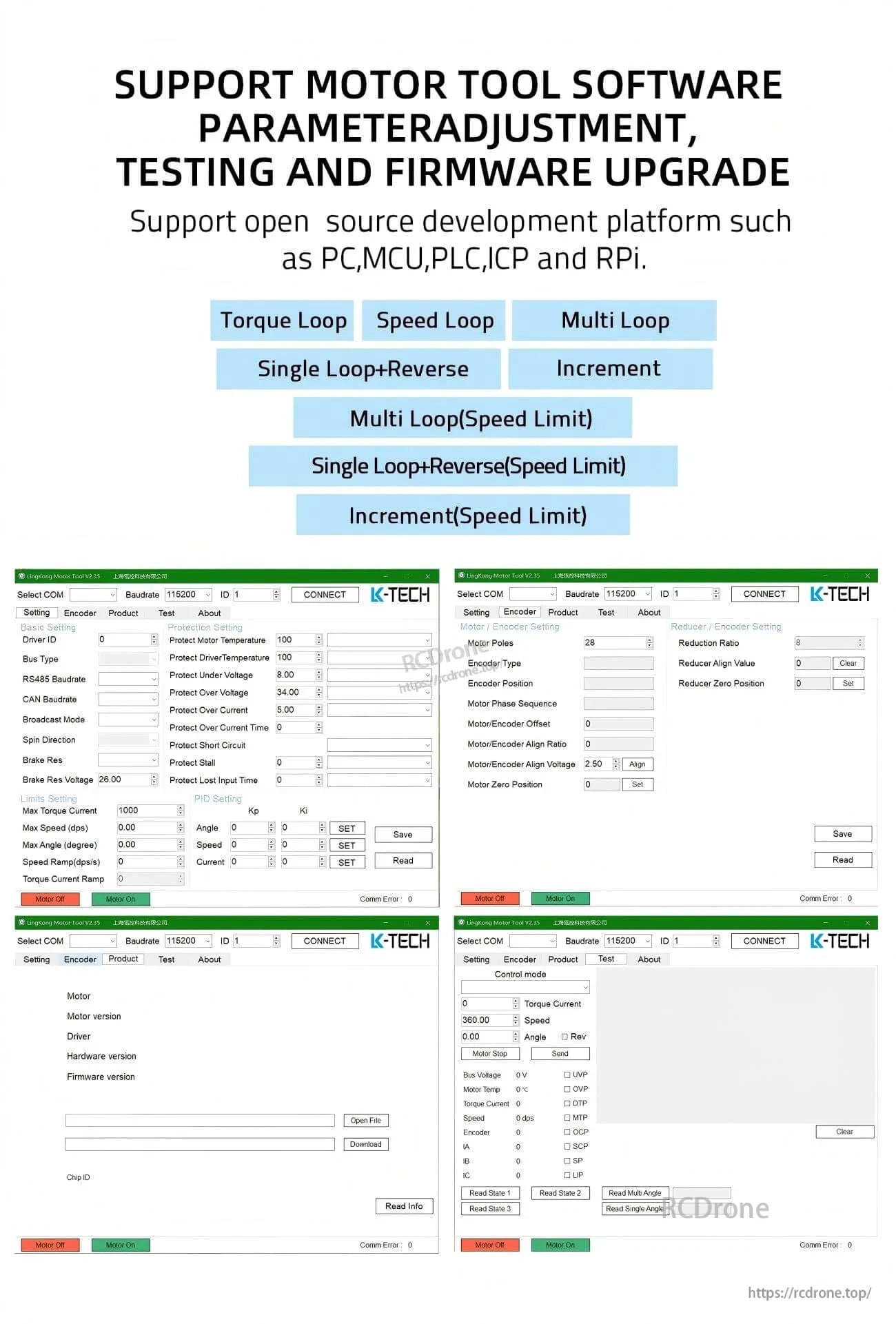
Програмне забезпечення для інструментів двигуна підтримує налаштування параметрів, тестування та оновлення прошивки під час налаштування та обслуговування.

Related Collections




