




LKMTECH MG4005E-i10-V3 Планетарний редукторний двигун, 24В 1:10 PG4210, RS485/CAN з подвійним енкодером
LKMTECH MG4005E-i10-V3 Планетарний редукторний двигун, 24В 1:10 PG4210, RS485/CAN з подвійним енкодером
LKMTECH
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Мотор LKMTECH MG4005E-i10-V3 є планетарним редукторним мотором , розробленим для роботизованого руху та автоматизації з'єднань, що вимагають компактного редукування, замкнутого зворотного зв'язку та комунікації по шині. Він інтегрує планетарний редуктор (PG4210, 1:10) та подвійні абсолютні магнітні енкодери (з боку мотора + з боку редуктора) для точного контролю.
Ключові особливості
- Планетарний редуктор: висока потужність, великий крутний момент та висока точність
- Безщітковий двигун + високоточний планетарний редуктор
- FOC управління (необхідний драйв/драйвер)
- Подвійні енкодери: 18-бітний однообертовий абсолютний магнітний енкодер (бокова сторона двигуна) + 14-бітний однообертовий абсолютний магнітний енкодер (бокова сторона редуктора)
- Енкодер на стороні редуктора підтримує вихід абсолютного значення однооберту та запам'ятовує нульову точку після вимкнення живлення
- RS485 або CAN-шина зв'язку
- Підтримує налаштування параметрів через програмне забезпечення для ПК, тестування та оновлення прошивки
- Підтримує платформи для розробки з відкритим кодом: ПК, MCU, PLC, промисловий комп'ютер та Raspberry Pi
- Підтримуються кілька режимів управління: Режим крутного моменту, Режим швидкості, Режим багатократного обертання, Режим одноразового обертання + напрямок, Режим інкрементного позиціонування, Режим багатократного обертання (з обмеженням швидкості), Режим одноразового обертання + напрямок (з обмеженням швидкості), Режим інкрементного позиціонування (з обмеженням швидкості)
- Двоїчні інтерфейси температурних датчиків моніторять температури двигуна та приводу в реальному часі
- Резервна функція гальма (Гальмо / Вивільнення гальма)
- Перераховані функції багатозахисту: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP
Для підтримки інтеграції та підтвердження передпродажу, зв'яжіться з https://rcdrone.top/ або надішліть електронний лист на [email protected].
Специфікації
| Назва товару | MG4005E-i10-V3 |
| Номінальна напруга | 24В |
| Максимальна швидкість | 320 об/хв |
| Номінальний крутний момент | 1 N.m |
| Номінальна швидкість | 255 об/хв |
| Номінальний струм | 1.8A |
| Максимальна потужність | 65Вт |
| Максимальний крутний момент | 2.5 N.m |
| Постійна швидкість | 106.3 об/хв/В |
| Постійний крутний момент | 0.06 N.m/A |
| Обертів | 28 |
| Тип обмотки | Y |
| Опір фази | 1.4Ω |
| Індуктивність фази | 0.5mH |
| Полюси двигуна | 28 |
| Інерція ротора | 140gcm² |
| Температура двигуна | ТАК |
| Тип редуктора | PG4210 |
| Передатне співвідношення | 1:10 |
| Зазор | ≤10 дуг. хв |
| Номінальне навантаження підшипника | 1000N |
| Вага двигуна | 183g |
| Рекомендований привід | DG40E |
| Вхідна напруга приводу | 7.4-32V |
| Зв'язок | RS485 або CAN |
| Частота зв'язку | RS485: 500Гц (115200bps) / CAN: 2КГц (1Mbps) |
| Енкодер | 18-бітний (двигун) + 14-бітний (редуктор) магнітний енкодер |
| Швидкість передачі даних енкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Швидкість передачі даних (CAN) | 100K, 125K, 250K, 500K, 1M |
| Режим управління | Контур моменту (24КГц) / Контур швидкості (8КГц) / Контур позиції (4КГц) |
| Крива прискорення | Трапецієподібне прискорення |
Визначення інтерфейсу
| Інтерфейс | Примітка |
|---|---|
| A/H | RS485-A або CAN-H |
| B/L | RS485-B або CAN-L |
| V- | Негативне джерело живлення |
| V+ | Позитивне джерело живлення |
| A/H | RS485-A або CAN-H |
| B/L | RS485-B або CAN-L |
| T | UART передавач |
| R | UART приймач |
| G | Сигнальний GND |
Застосування
- Гуманоїдні роботи
- Роботизовані руки
- Екзоскелети / носимі роботи
- Чотириногі роботи / робот-собака
- AGV транспортні засоби / AGV автомобіль
- ARU роботи
Посібники / Файли
Деталі

MG4005E-i10-V3 поєднує безщітковий двигун з планетарним редуктором в компактній формі для роботизованих суглобів та автоматизованих осей.

Двохканальні абсолютні магнітні енкодери забезпечують зворотний зв'язок з боку мотора та виходу, з окремим перемикачем ID для налаштувань шини.
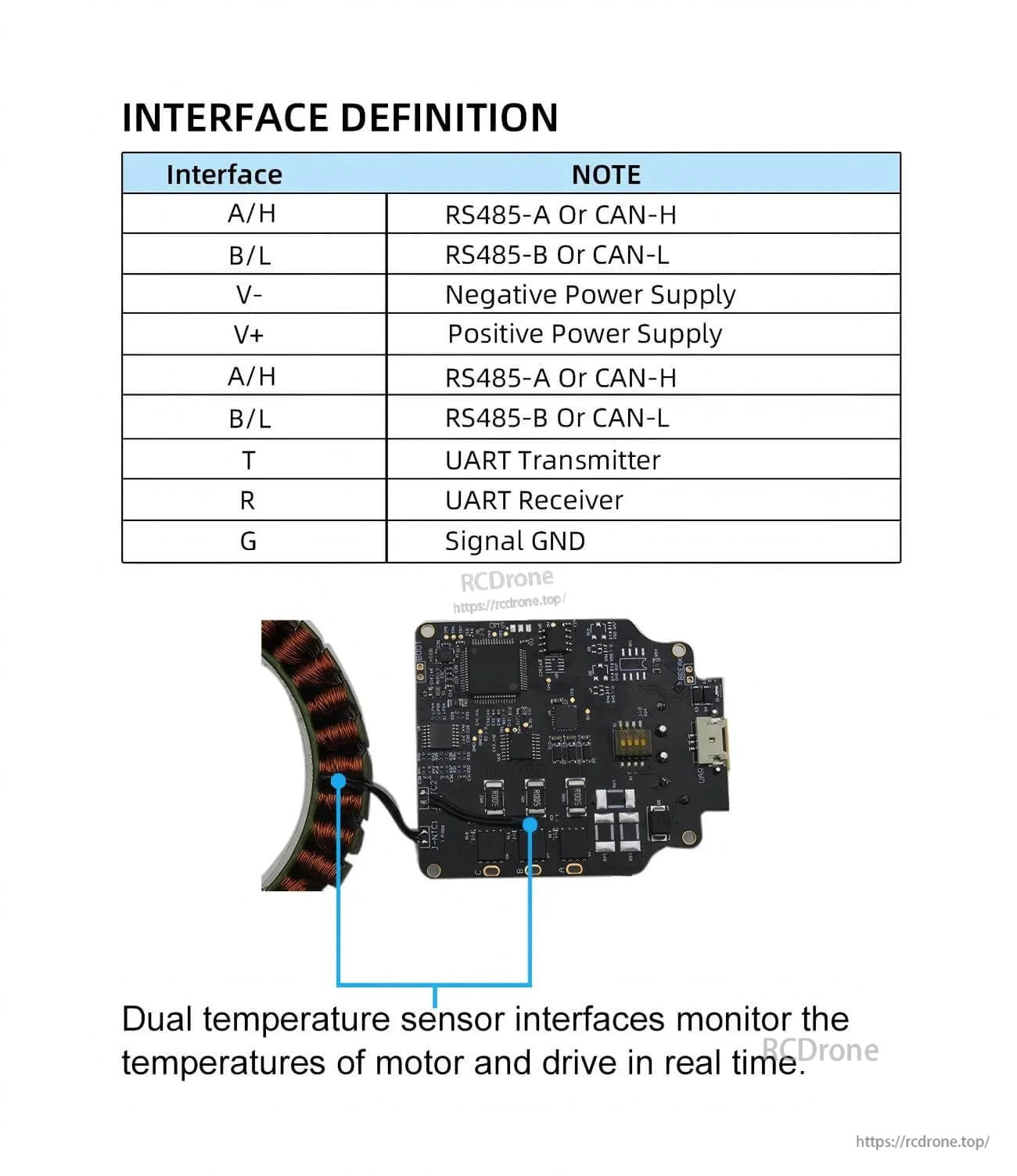
Проводка спрощена завдяки чітко визначеним клемам для живлення, RS485/CAN зв'язку та підключень сигналу UART.
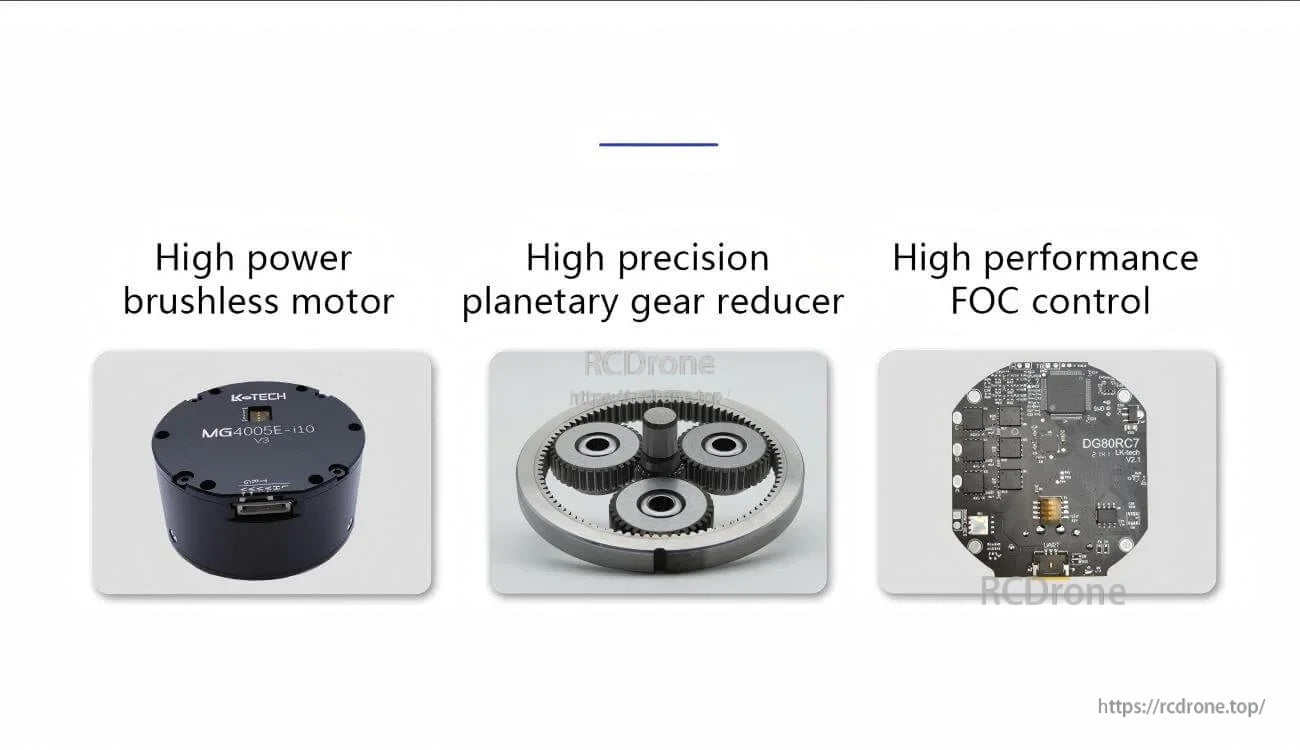
Безщітковий мотор, прецизійна планетарна передача та управління FOC підтримують плавну передачу крутного моменту та точне управління рухом.

Привід підтримує RS485 або CAN зв'язок та широкий діапазон вхідної напруги (7.4–32V) для гнучкої інтеграції.
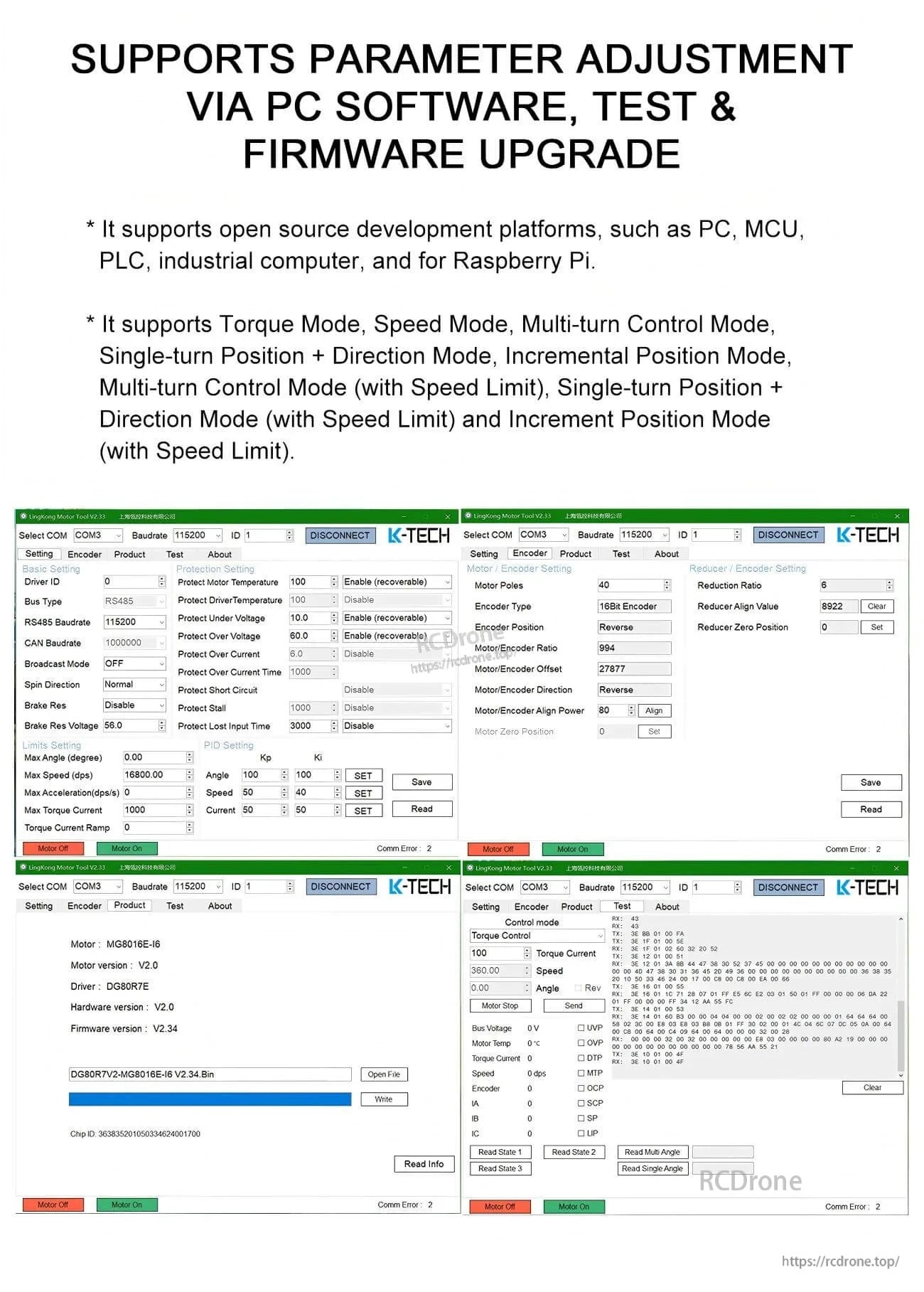
Програмне забезпечення для ПК дозволяє налаштування параметрів, функціональне тестування та оновлення прошивки під час введення в експлуатацію та обслуговування.
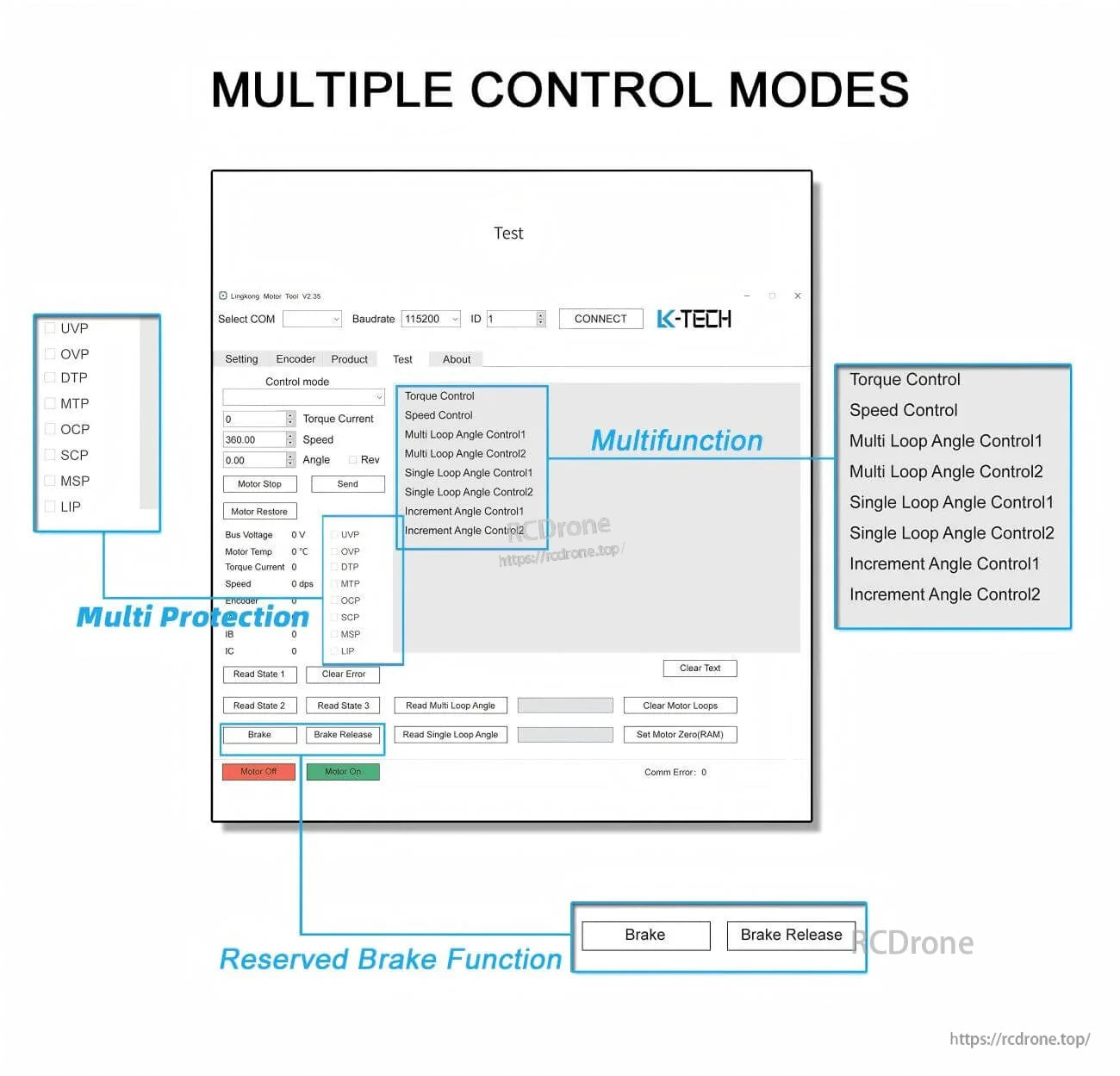
Виберіть з кількох режимів управління, таких як управління крутним моментом, швидкістю та положенням, з вбудованим моніторингом статусу захисту.
Розроблено для компактного актуатора в мобільних роботах, артикуляційних руках, чотириногих та носимих роботах.
Related Collections




