




LKMTECH MG4010E-i10B-V3 планетарний мотор-редуктор з гальмом, 24В 320 об/хв, RS485/CAN, енкодер 18 біт
LKMTECH MG4010E-i10B-V3 планетарний мотор-редуктор з гальмом, 24В 320 об/хв, RS485/CAN, енкодер 18 біт
LKMTECH
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
LKMTECH MG4010E-i10B-V3 мотор є планетарним редукторним мотором з гальмом, розробленим для робототехніки та автоматизації актуаторів, які вимагають компактного розміру, редукторного крутного моменту та комунікації по полю (RS485 або CAN). Він використовує 18-бітний магнітний енкодер і підтримує контури управління крутним моментом, швидкістю та положенням.
Ключові особливості
- Два етапи з гальмами планетарний редукторний мотор (серія MG4010E-i10B)
- Передатне число: 1:10; Зворотний хід редуктора: 8 дугових хвилин (також вказується як ≤8 дугових хвилин)
- 18-бітний однообертний абсолютний магнітний енкодер (18-бітний магнітний енкодер)
- Комунікація: RS485 або CAN
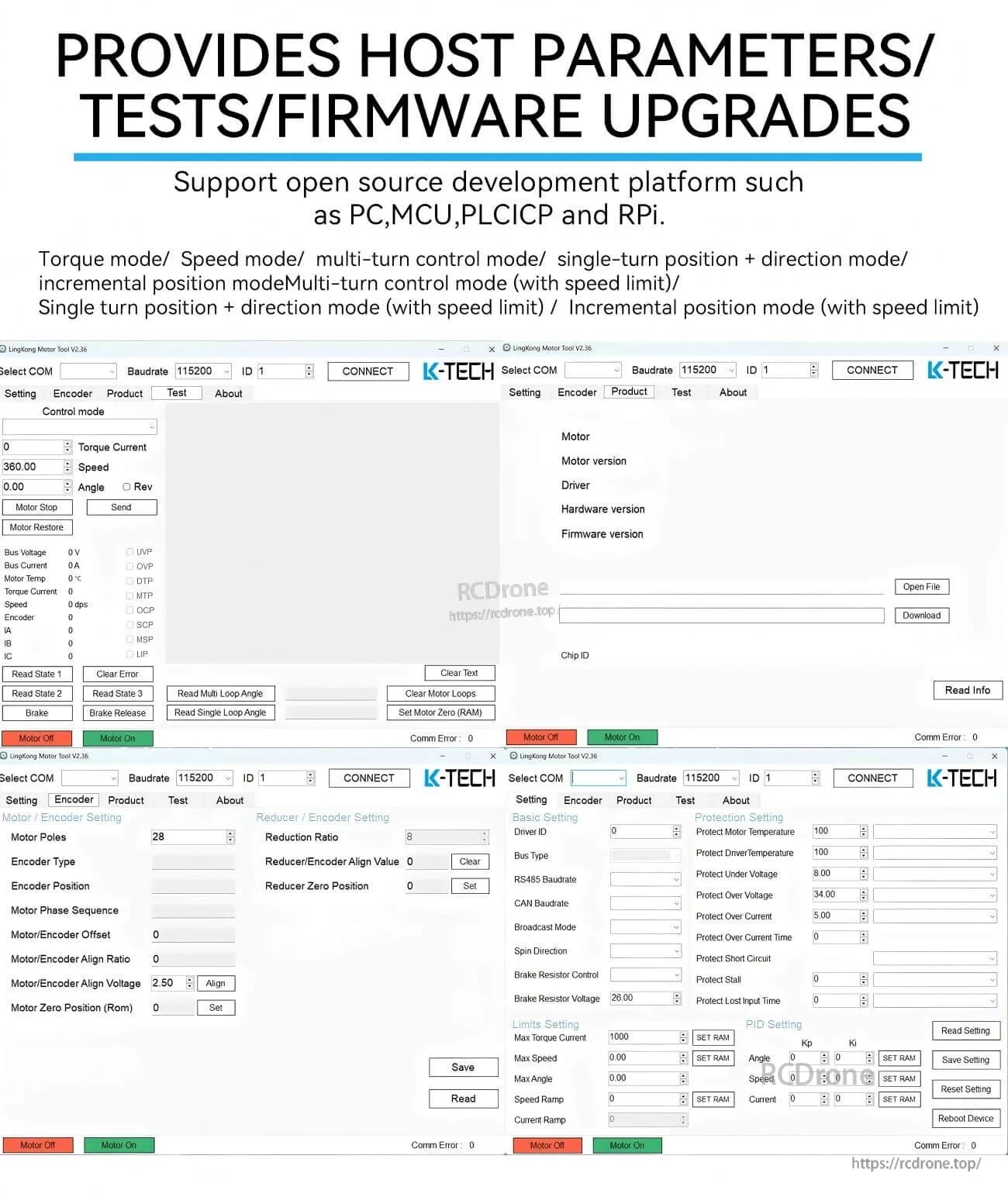
- Режими/контури управління: Контур крутного моменту (32КГц) / Контур швидкості (8КГц) / Контур положення (4КГц)
- Крива прискорення: Трапецієподібне прискорення
- Вбудоване гальмо; Тип гальма BG4906; Крутний момент гальма 3.2 N.m
- Особливості інтерфейсу: перемикач ID
- Текст, пов'язаний з приводом: вбудоване гальмо; зв'язок RS485 або CAN; подвійні енкодери, запам'ятовують нульову точку після вимкнення живлення; вхідна напруга 12-60V
Технічні характеристики
| Назва товару | MG4010E-i10B-V3 |
| Номінальна напруга | 24V |
| Максимальна швидкість | 320 об/хв |
| Номінальна швидкість | 260 об/хв |
| Номінальний момент | 2.5N.m |
| Максимальний момент | 4.5N.m |
| Номінальний струм | 3.5A |
| Максимальна потужність | 140W |
| Константа швидкості | 108.3 об/хв/В |
| Константа моменту | 0.07N.m/A |
| Перемикає | 14 |
| Тип обмотки | Y |
| Опір фази | 0.604Ω |
| Індуктивність фази | 0.28mH |
| Полюси двигуна | 28 |
| Інерція ротора | 202gcm² |
| Температура двигуна | ТАК |
| Тип редуктора | PG4210 |
| Передатне співвідношення | 1:10 |
| Зазор | ≤8 дугових хвилин |
| Номінальне навантаження підшипника | 1000N |
| Вага двигуна | 392g |
| Тип гальма | BG4906 |
| Момент гальма (N.m) | 3.2N. |
| Напруга запуску (В) | 24В |
| Підтримуюча напруга (В) | 7В |
| Підтримуюча потужність (Вт) | 1.4Вт |
| Рекомендувати драйвер | DG40 |
| Вхідна напруга драйвера | 7.4-32V |
| Зв'язок | RS485 АБО CAN |
| Частота зв'язку | RS485:500Гц(115200bps)/CAN:2КГц(1Mbps) |
| Енкодер | 18-бітний магнітний енкодер |
| Швидкість передачі даних енкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Швидкість передачі даних (CAN) | 100K, 125K, 250K, 500K, 1M |
| Режим управління | Контур моменту (32КГц)/Контур швидкості (8КГц)/Контур позиції (4КГц) |
| Крива прискорення | Трапецієподібне прискорення |
| Розмір мотора | Φ 59*37 |
| Зазор в редукторі | 8 дугових хвилин |
Визначення інтерфейсу
- ID перемикач
| Порт | Інструкції |
|---|---|
| A/H | RS485-A або CAN-H |
| B/L | RS485-B або CAN-L |
| V- | Негативне живлення |
| V+ | Позитивне живлення |
| A/H | RS485-A або CAN-H |
| B/L | RS485-B або CAN-L |
| T | UART Передавач |
| R | UART Приймач |
| G | Сигнальний GND |
Застосування
- Гуманоїдні роботи
- Роботизовані руки
- Екзоскелети / Екзоскелетний робот
- Чотириногі роботи / Меха-собака
- AGV Транспортні засоби / AGV автомобіль
- ARU роботи
- Сервісний робот
- Портативний лідар
- Робот для реабілітаційного навчання
- Інспекційний робот
Посібники
Для підтримки інтеграції та питань перед продажем, звертайтеся [email protected] or відвідайте https://rcdrone.top/.
Деталі

Компактний MG4010E-i10B-V3 планетарний редукторний мотор з інтегрованим гальмом, зниження 1:10 та ≤8 аркмін затримки для точних роботизованих суглобів.
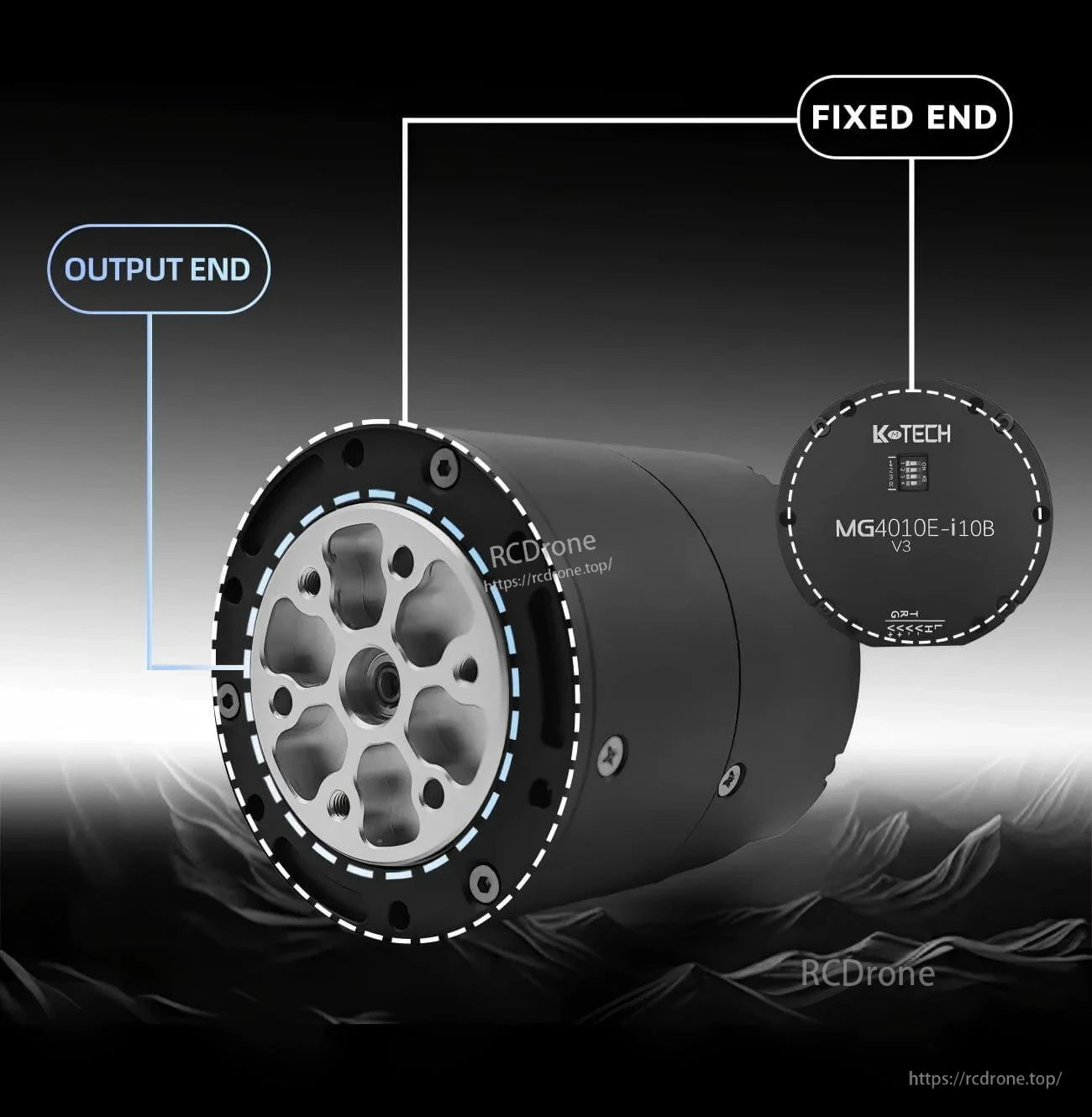
Чітка ідентифікація виходу та фіксованого кінця допомагає спростити механічну компоновку та орієнтацію проводки під час інтеграції.

18-бітний однообертовий абсолютний магнітний енкодер та підтримка RS485/CAN шини забезпечують контроль моменту, швидкості та позиції для автоматизаційних актуаторів.
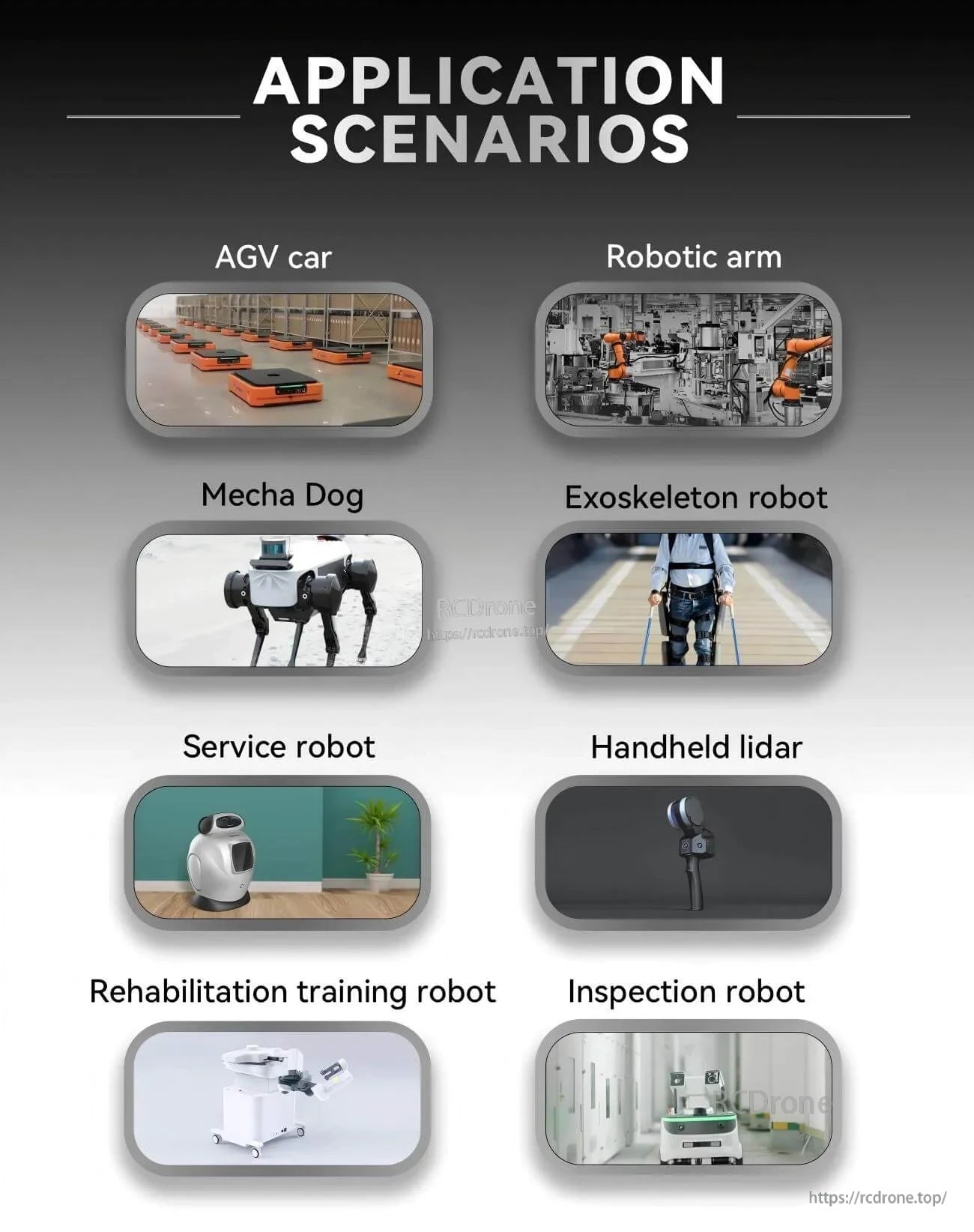
Розроблено для використання в робототехніці та автоматизації, включаючи AGV, роботизовані руки, чотириногі роботи, екзоскелети та платформи для інспекції.
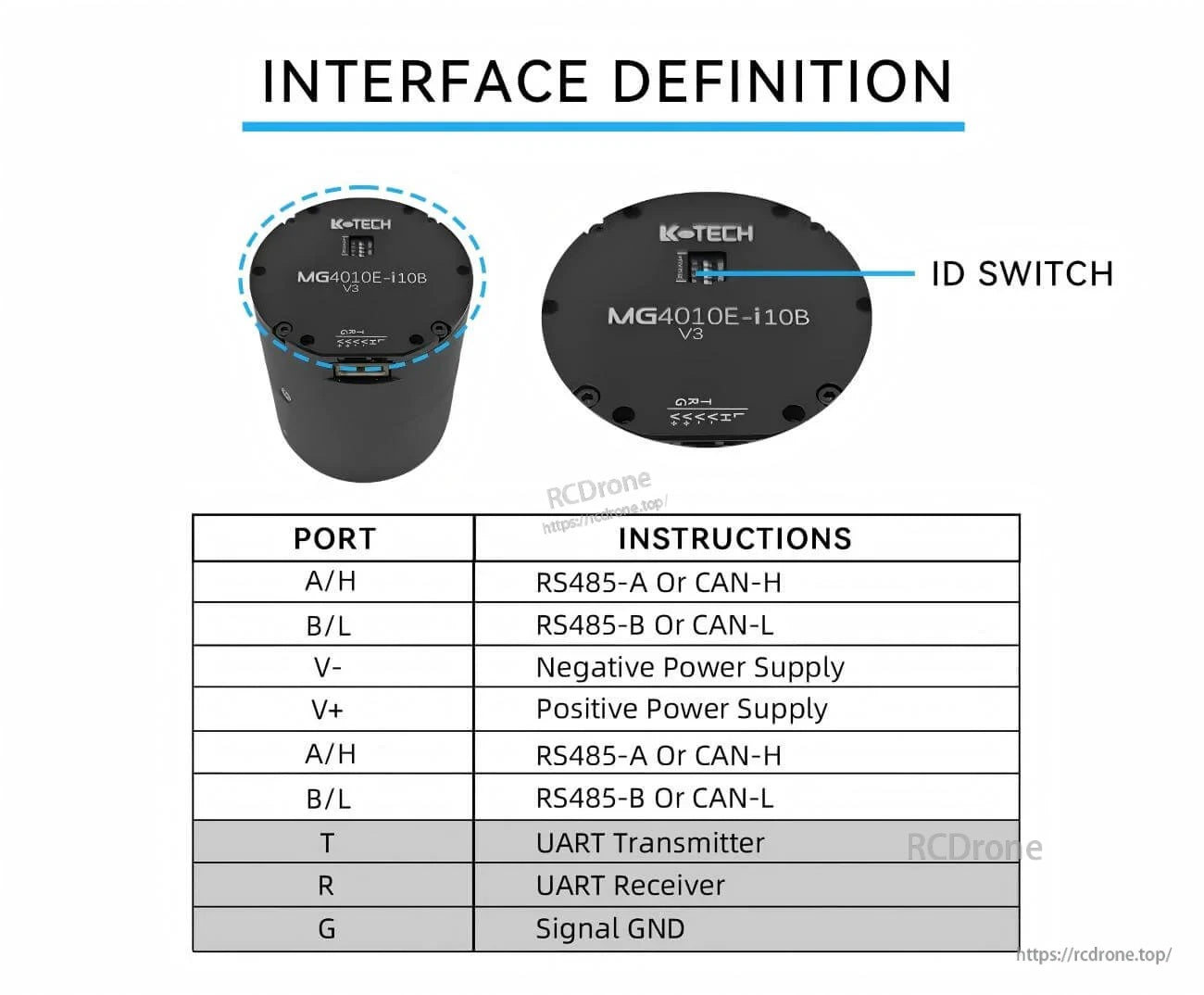
Картографування портів включає RS485-A/CAN-H та RS485-B/CAN-L, а також живлення, UART TX/RX, сигнал заземлення та вбудований перемикач ID.

Related Collections




