




LKMTECH MG4010E-i36-V3 Планетарний редукторний мотор 24В 1:36 RS485/CAN Магнітний енкодер для робототехніки
LKMTECH MG4010E-i36-V3 Планетарний редукторний мотор 24В 1:36 RS485/CAN Магнітний енкодер для робототехніки
LKMTECH
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Мотор LKMTECH MG4010E-i36-V3 є планетарним редукторним мотором , розробленим для робототехніки та актуаторів з керування рухом. Він поєднує безщітковий мотор, планетарний редуктор та магнітний енкодер, з варіантами зв'язку, які вказані як RS485 або CAN.
Ключові особливості
- Планетарний редукторний мотор (MG4010E-i36, V3).
- Передатне число: 1:36 (також вказано як “Передатне число 1:36”).
- Зворотний хід редуктора: 7 дугових хвилин (позначка на зображенні) / 12 дугових хвилин (таблиця специфікацій).
- Енкодер: 18-бітний абсолютний магнітний енкодер одного оберту (текст на зображенні); також вказано як 18-бітний (мотор) + 14-бітний (редуктор) магнітний енкодер (таблиця специфікацій).
- Зв'язок: RS485 або CAN.
- Посилання на драйвер/FOC драйвер (текст на зображенні: “Драйвер FOC високої продуктивності”).
- Вбудований гальмо (текст на зображенні/мітка UI).
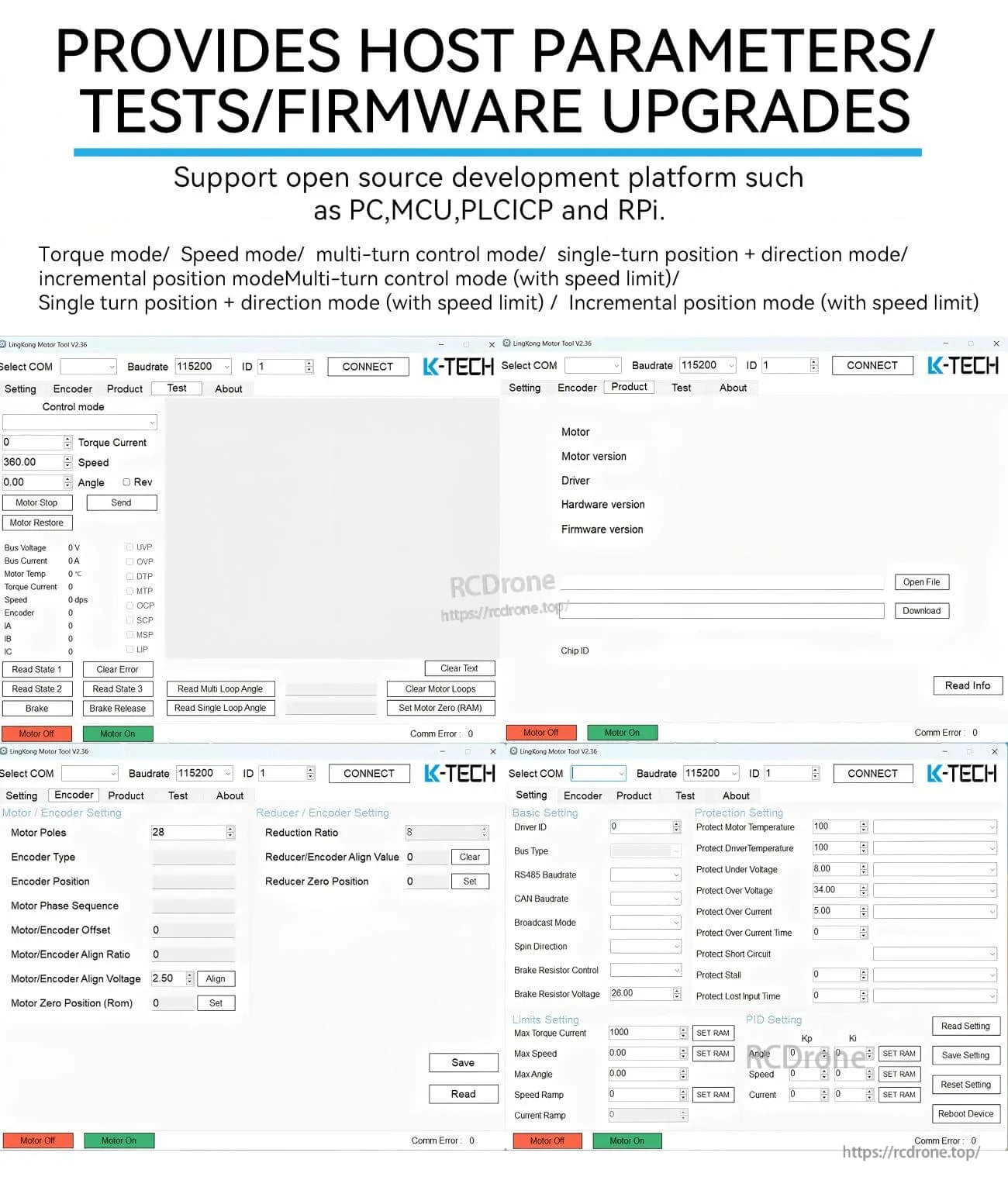
- Підтримуються параметри хоста/тести/оновлення прошивки (текст на зображенні).
Технічні характеристики
| Назва товару | MG4010E-i36-V3 |
| Номінальна напруга | 24В |
| Максимальна швидкість | 90 об/хв |
| Номінальна швидкість | 77 об/хв |
| Номінальний струм | 2.4A |
| Максимальна потужність | 132Вт |
| Номінальний момент | 6 N.m (таблиця специфікацій) / 9 N.m (позначення на зображенні) |
| Максимальний момент | 13 N.m (таблиця специфікацій) / 18 N.m (позначення на зображенні) |
| Константа швидкості | 3 об/хв/В |
| Константа моменту | 2.58 N.m/A |
| Обертів | 14 |
| Тип обмотки | Y |
| Опір фази | 0.68 Ω |
| Фазова індуктивність | 0.25 мГ |
| Полюси двигуна | 28 |
| Інерція ротора | 158 гсм² |
| Температура двигуна | ТАК |
| Тип редуктора | PG5336 |
| Передатне співвідношення | 1:36 |
| Границя зворотного ходу | ≤12 дуг. хв (специфікація) / 6 дуг. хв (мітка на зображенні) |
| Номінальне навантаження підшипника | 1120 Н |
| Вага двигуна | 378 г |
| Рекомендований привід | DG40E |
| Вхідна напруга приводу | 12-24В (специфікація) / 12-60В (мітка на зображенні) |
| Зв'язок | RS485 АБО CAN |
| Частота зв'язку | RS485: 500 Гц (115200 біт/с) / CAN: 2 кГц (1 Мбіт/с) |
| Енкодер | 18-бітний (двигун) + 14-бітний (редуктор) Магнітний енкодер |
| Швидкість передачі даних енкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Мбіт/с |
| Швидкість передачі даних (CAN) | 100K, 125K, 250K, 500K, 1M |
| Режим управління | Контур моменту (24 кГц) / Контур швидкості (8 кГц) / Контур позиції (4 кГц) |
| Крива прискорення | Трапецієподібне прискорення |
| Розмір двигуна | Φ 53*54.5 (мітка зображення) |
Визначення інтерфейсу
- Перемикач ID (мітка зображення: “ID SWITCH”).
| Порт | Інструкції |
|---|---|
| А/Н | RS485-A або CAN-H |
| Б/Л | RS485-B або CAN-L |
| V- | Негативне живлення |
| V+ | Позитивне живлення |
| Т | UART Передавач |
| R | UART Приймач |
| G | Сигнальний GND |
Сценарії застосування
- Гуманоїдні роботи
- Роботизовані руки
- Екзоскелети
- Чотириногі роботи
- AGV транспортні засоби / AGV автомобіль
- ARU роботи
- Меха-собака
- Сервісний робот
- Портативний лідар
- Робот для реабілітаційного навчання
- Інспекційний робот
Контроль & Програмне забезпечення Примітки
- Підтримує платформи відкритого програмного забезпечення, такі як ПК, МК, ПЛК, ІКП та RPi.
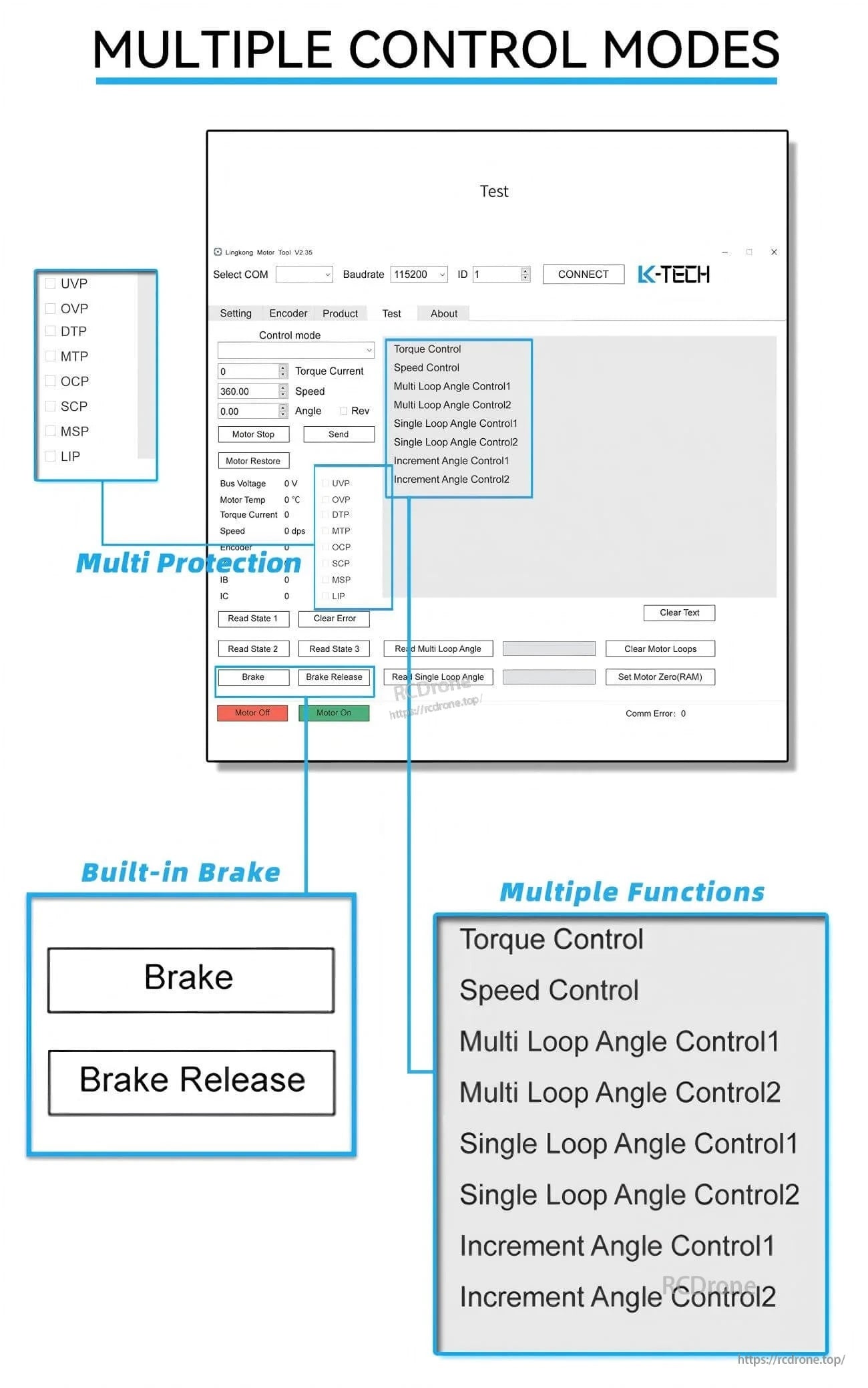
- Перелічені режими (текст на зображенні): Режим крутного моменту, Режим швидкості, Режим багатократного обертання, Режим одноразового обертання + напрямок, Режим інкрементальної позиції; також показані версії з обмеженням швидкості.
- Кілька режимів управління, показаних в інтерфейсі: Управління крутним моментом, Управління швидкістю, Багатократне управління кутом 1, Багатократне управління кутом 2, Одноразове управління кутом 1, Одноразове управління кутом 2, Інкрементальне управління кутом 1, Інкрементальне управління кутом 2.
- Показані етикетки багатозахисту: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Показані вбудовані елементи управління гальмами: Гальмо, Випуск гальма.
Для перевірки сумісності перед продажем (інтеграція RS485/CAN, вибір швидкості передачі) або допомоги з доступом до файлів, звертайтеся [email protected] or відвідайте https://rcdrone.top/.
Посібники / Документи
Деталі

MG4010E-i36-V3 поєднує безщітковий двигун, планетарний редуктор та магнітний енкодер для компактних роботизованих актуаторів.
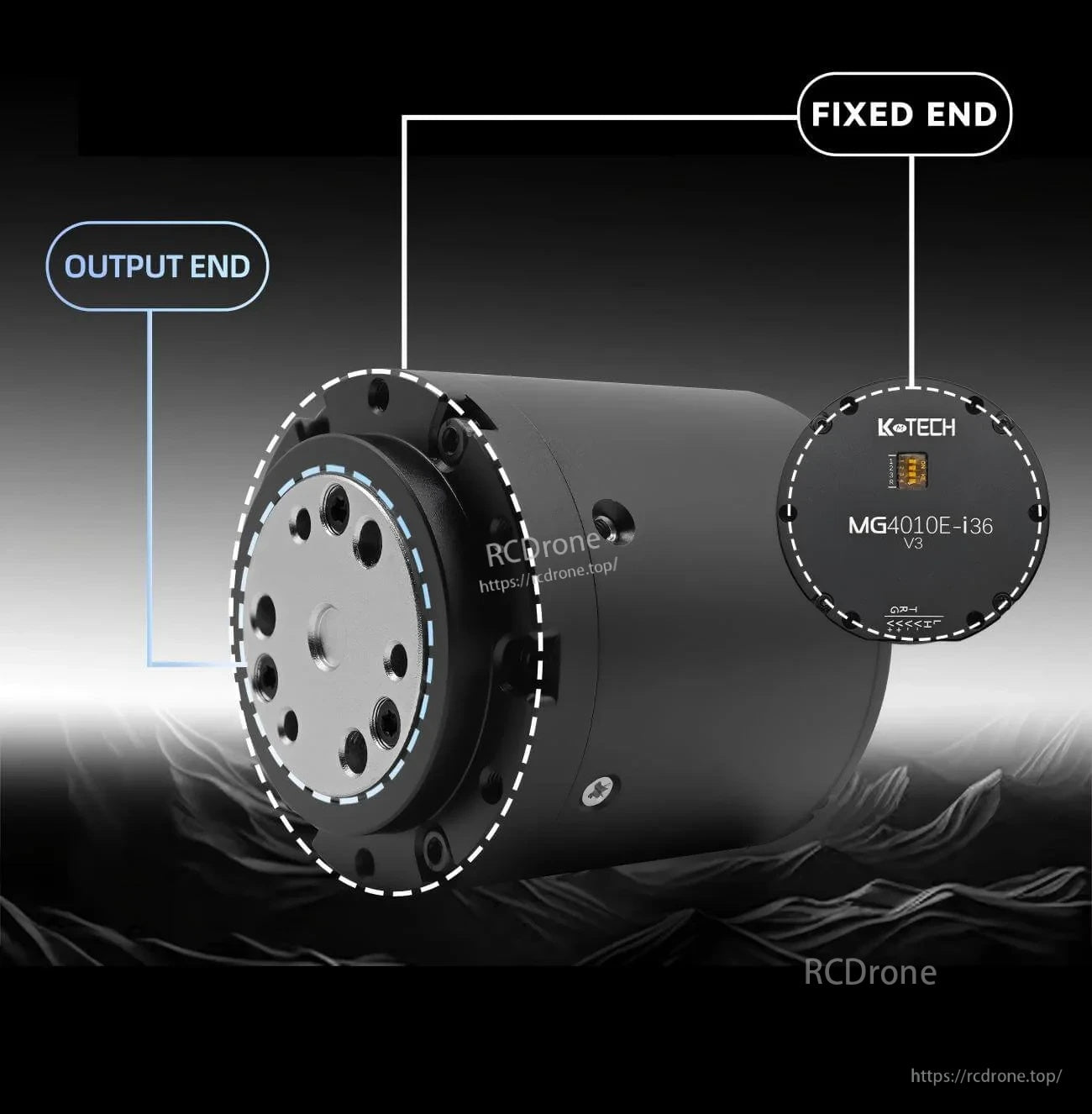
Вихідний кінець у фланцевому стилі та фіксована компоновка спрощують інтеграцію в руки, ноги та інші суглобні модулі.

Комунікація RS485 або CAN поєднується з драйвером FOC та зворотним зв'язком абсолютного магнітного енкодера для стабільного контролю моменту, швидкості та позиції.
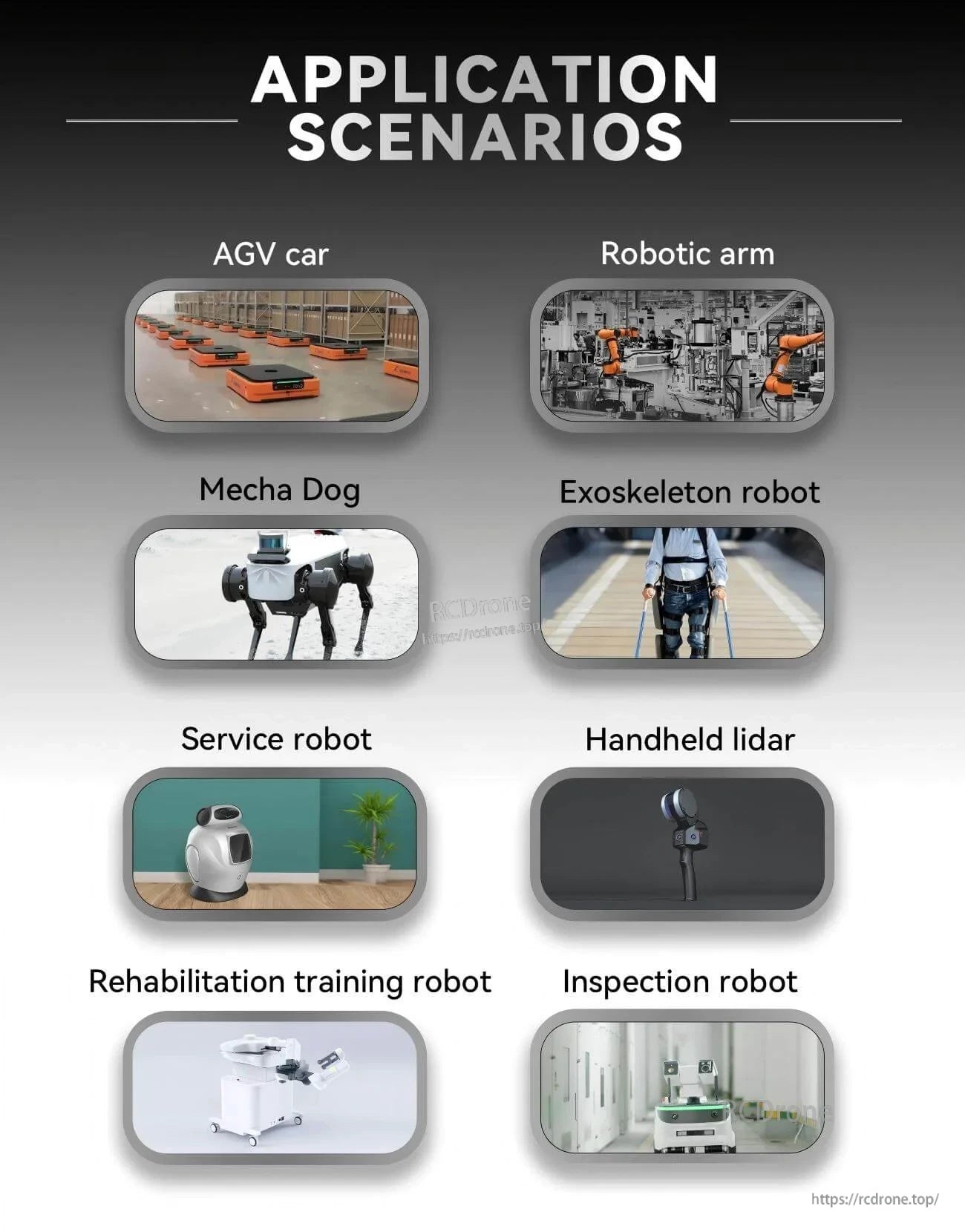
Загальні випадки використання включають AGV, роботизовані руки, чотириногі платформи, екзоскелети та інспекційні або сервісні роботи.
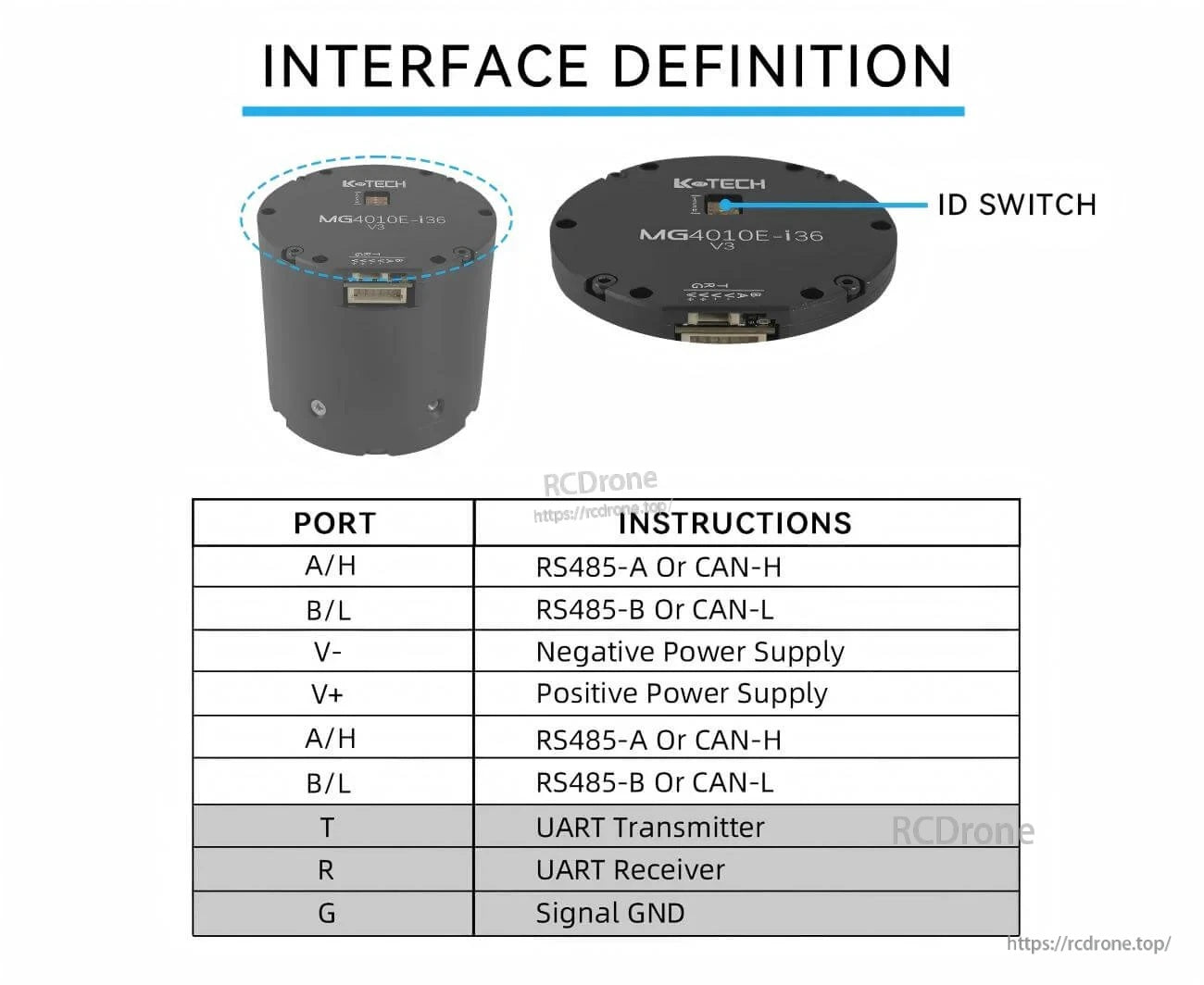
Проводка спрощена завдяки маркованим контактам RS485/CAN, підключенням живлення, UART Tx/Rx, сигнальному заземленню та вбудованому перемикачу ID.
Вбудоване управління гальмами та кілька режимів роботи допомагають налаштувати поведінку для різних завдань керування рухом та вимог безпеки.
Related Collections




