




Двигун LKMTECH MG4010E-i36B-V3 24В 1:36 планетарний редуктор з гальмом, RS485/CAN, магнітний енкодер
Двигун LKMTECH MG4010E-i36B-V3 24В 1:36 планетарний редуктор з гальмом, RS485/CAN, магнітний енкодер
LKMTECH
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Мотор LKMTECH MG4010E-i36B-V3 є планетарним редукторним мотором з інтегрованим гальмом та зворотним зв'язком енкодера, розробленим для активації робототехніки, де потрібен точний контроль крутного моменту/швидкості/позиції та компактна інтеграція. Він підтримує RS485 або CAN зв'язок і специфікований з редуктором PG4210 (1:36) та подвійним магнітним енкодером (18-бітний мотор + 14-бітний редуктор).
Ключові особливості
- Планетарний редуктор: PG4210, передавальне співвідношення 1:36, зворотний хід ≤12 дугових хвилин
- Енкодер: 18-бітний (мотор) + 14-бітний (редуктор) магнітний енкодер
- Зв'язок: RS485 або CAN
- Контрольні контури: Контур крутного моменту (32КГц) / Контур швидкості (8КГц) / Контур позиції (4КГц)
- Крива прискорення: Трапецієподібне прискорення
- Гальмо: BG4906, крутний момент гальма 0.6N.
- Температура мотора: ТАК
Технічні характеристики
| Назва товару | MG4010E-i36B-V3 |
| Номінальна напруга | 24В |
| Максимальна швидкість | 90 об/хв |
| Номінальна швидкість | 77 об/хв |
| Номінальний момент | 6Н·м |
| Максимальний момент | 13Н·м |
| Номінальний струм | 2.4А |
| Максимальна потужність | 132Вт |
| Константа швидкості | 3 об/хв/В |
| Константа моменту | 2.58Н·м/А |
| Обертів | 14 |
| Тип обмотки | Y |
| Опір фази | 0.68Ω |
| Індуктивність фази | 0.25мГ |
| Полюси двигуна | 28 |
| Інерція ротора | 158гсм² |
| Температура двигуна | ТАК |
| Тип редуктора | PG4210 |
| Передаточне співвідношення | 1:36 |
| Зазор | ≤12 дуг. хв |
| Номінальне навантаження підшипника | 1120N |
| Вага двигуна | 542.5г |
| Тип гальма | BG4906 |
| Момент гальма (N.m) | 0.6N.м |
| Напруга запуску (В) | 24В |
| Підтримуюча напруга (В) | 7В |
| Підтримуюча потужність (Вт) | 1.4Вт |
| Рекомендувати привод | DG40E |
| Вхідна напруга приводу | 7.4-32V |
| Зв'язок | RS485 АБО CAN |
| Частота зв'язку | RS485:500Гц(115200bps)/CAN:2КГц(1Mbps) |
| Енкодер | 18біт(двигун)+14біт(редуктор) Магнітний енкодер |
| Швидкість передачі даних енкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Швидкість передачі даних (CAN) | 100K, 125K, 250K, 500K, 1M |
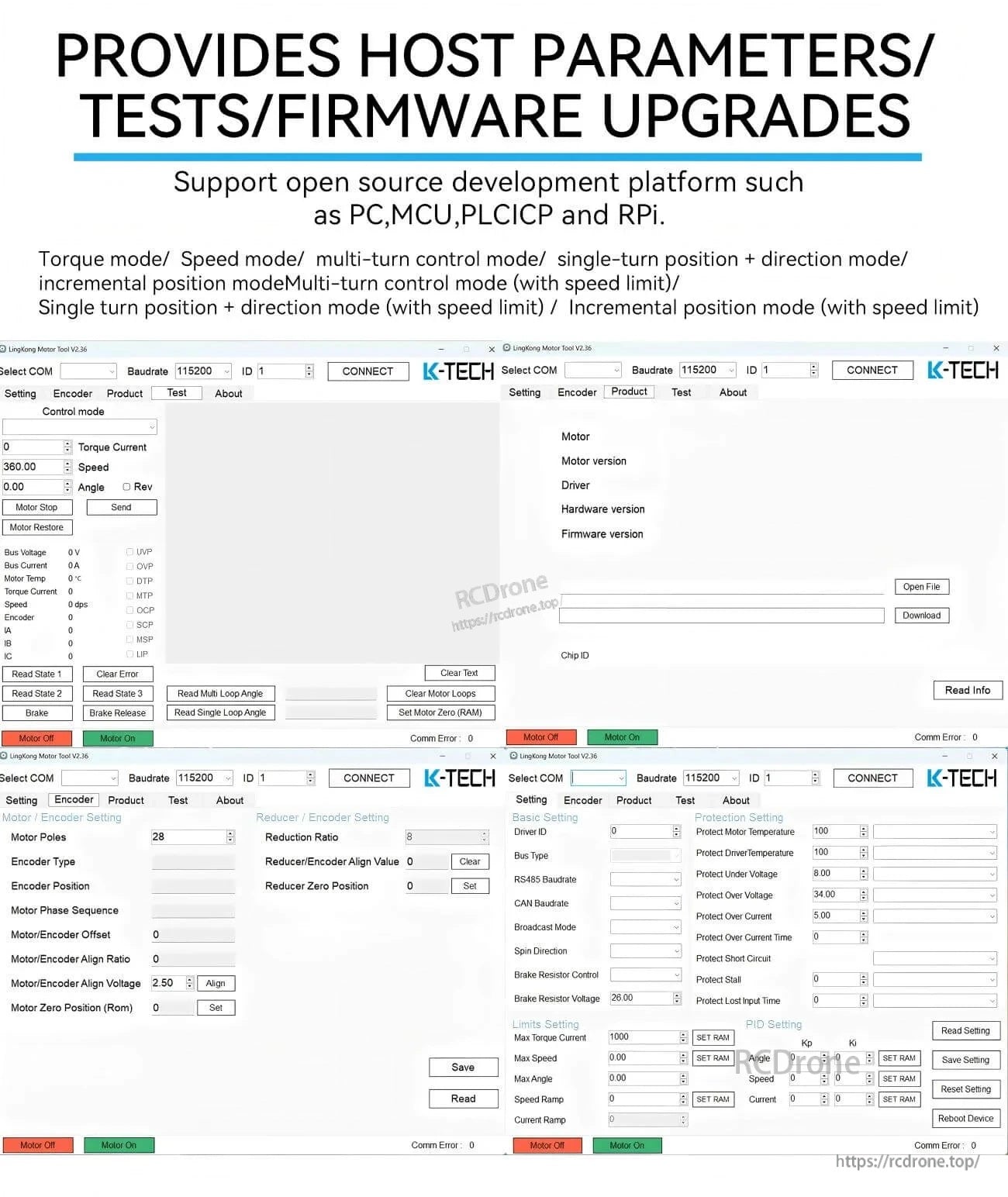
| Режим управління | Контур моменту (32КГц)/Контур швидкості (8КГц)/Контур позиції (4КГц) |
| Крива прискорення | Трапецієподібне прискорення |
Визначення інтерфейсу (Порти)
Значення портів для цієї серії двигунів:
- A/H: RS485-A або CAN-H
- B/L: RS485-B або CAN-L
- V-: Негативне живлення
- V+: Позитивне живлення
- T: Передавач UART
- R: Приймач UART
- G: Сигнальний GND
- ID перемикач
Застосування
- Гуманоїдні роботи
- Роботизовані руки
- Екзоскелети
- Чотириногі роботи
- AGV транспортні засоби
- ARU роботи
Посібники / Документи
Для підтримки інтеграції та перевірки сумісності перед продажем, зверніться [email protected] or відвідайте https://rcdrone.top/.
Деталі

Компактний корпус планетарного редуктора інтегрує гальмо та вбудований інтерфейс в одному актуатор пакеті.
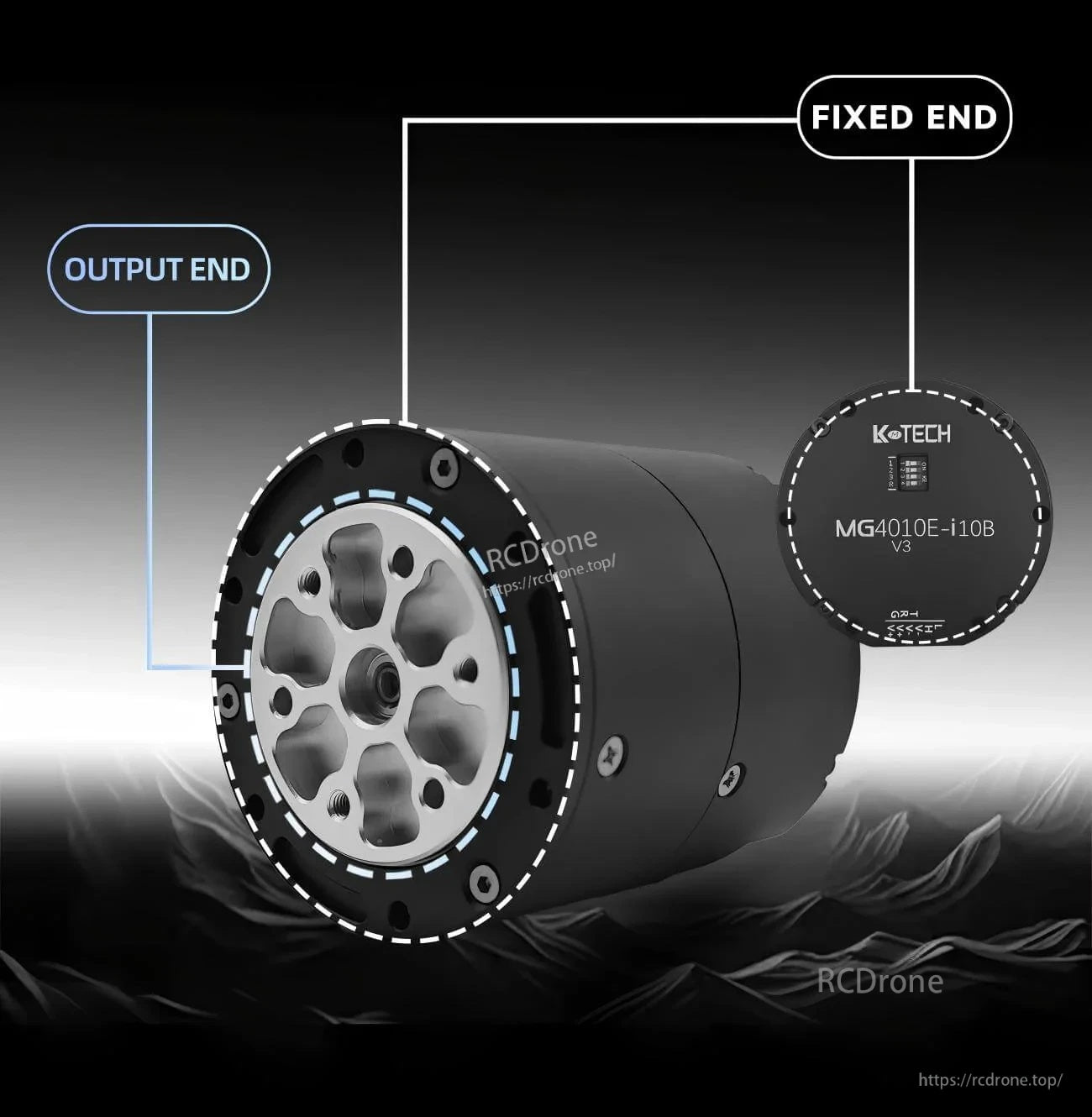
Чітко визначений вихідний кінець і фіксований кінець допомагають спростити механічну інтеграцію та вирівнювання в збірках.

Зворотний зв'язок енкодера та комунікація по шині підтримують стабільний контроль моменту, швидкості та позиції для роботизованих суглобів.
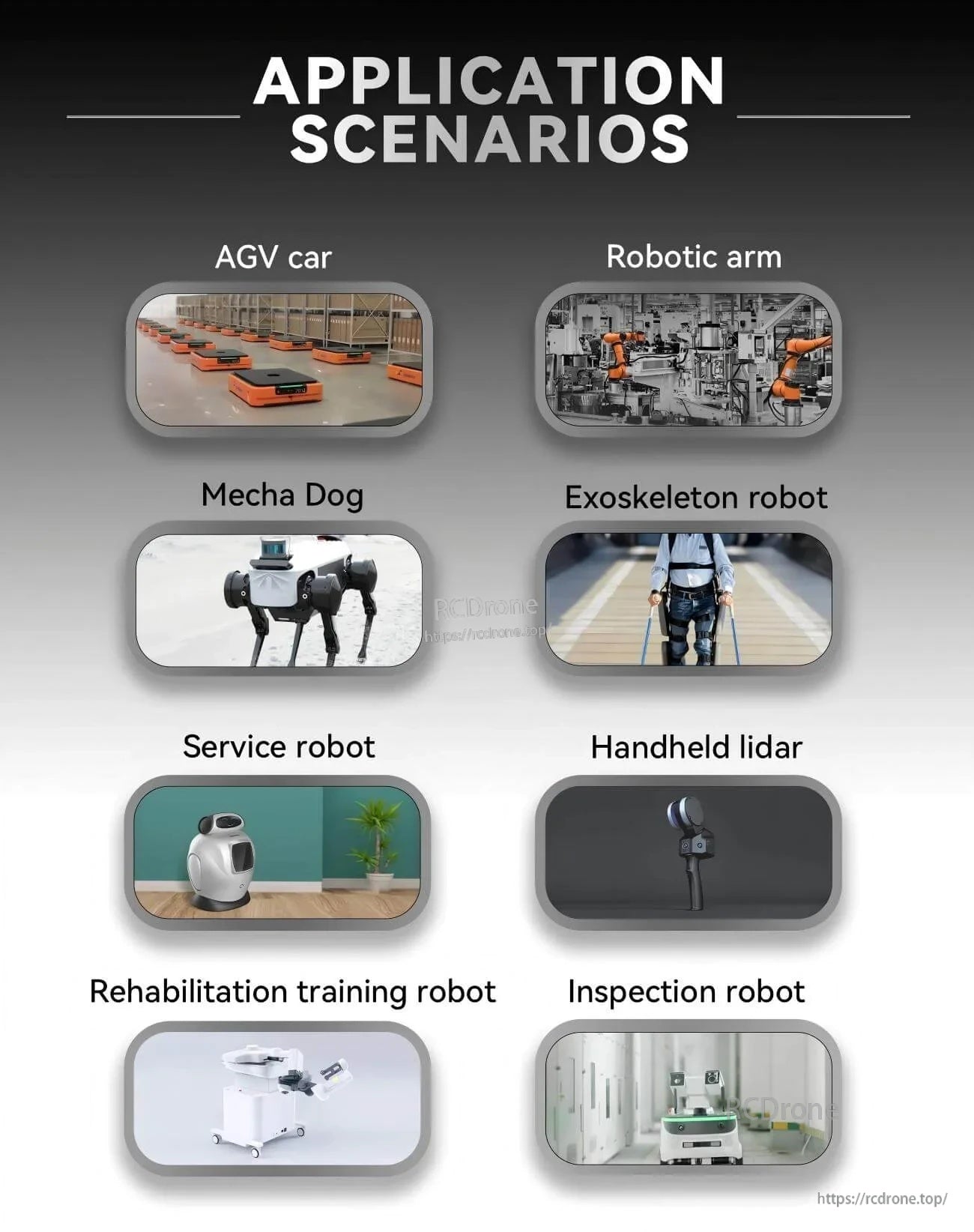
Розроблено для завдань активації роботів від AGV та роботизованих рук до роботів на ногах та екзоскелетних систем.
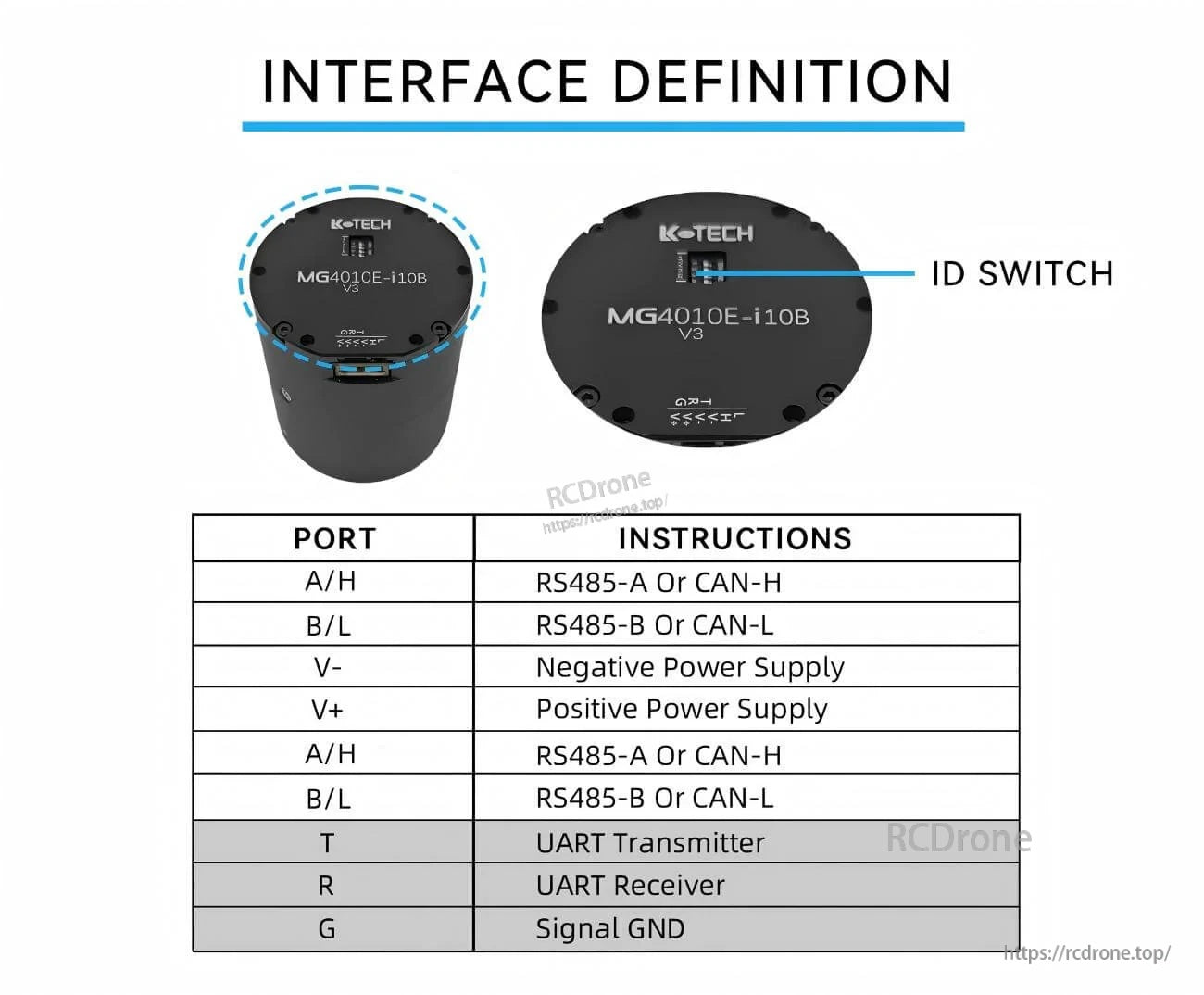
Визначення портів охоплює живлення, проводку RS485/CAN та пінів UART, з вбудованим перемикачем ID для адресації.

Related Collections




