




Двигун LKMTECH MG6012-i36-V3 24В/48В 25Н·м 1:36 Планетарний редуктор, RS485/CAN, 18-бітний енкодер
Двигун LKMTECH MG6012-i36-V3 24В/48В 25Н·м 1:36 Планетарний редуктор, RS485/CAN, 18-бітний енкодер
LKMTECH
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
LKMTECH MG6012-i36-V3 Двигун є модулем безщіткового двигуна високої потужності з планетарним редуктором та підтримкою комунікації енкодера/приводу для систем руху робототехніки. Текст позиціонування продукту включає: “Найвищий стандарт дизайну продукту”, “Висока вихідна потужність”, “Великий вихідний крутний момент” та “Висока точність”.
Сценарії застосування
- Гуманоїдні роботи
- Роботизовані руки
- Екзоскелети
- Чотириногі роботи
- AGV транспортні засоби / AGV автомобіль
- ARU роботи
- Робот-собака
- Носимий робот
Ключові особливості
- Високопотужний безщітковий двигун
- Високоточний планетарний редуктор
- Високопродуктивний драйвер FOC (текстове посилання)
- Вхідна напруга живлення: 12-60V
- Зв'язок: CAN або RS485
- Головний контролер: 170М основна частота з 32-бітним ARM (текстове посилання)
- Енкодер: 18-бітний одно кільцевий абсолютний енкодер / 18-бітний магнітний енкодер (обидва зазначені)
- “Одна калібрування, нульова позиція ніколи не втрачається, не потрібно шукати нульову точку при втраті живлення.” (вказано)
- ID перемикач (вказано)
- Двохканальний датчик температури; моніторинг температури двигуна та драйвера в реальному часі (вказано)
Технічні характеристики
| Параметр | Версія 24V | Версія 48V |
|---|---|---|
| Назва товару | MG6012-i36-V3 | MG6012-i36-V3 |
| Номінальна напруга | 24V | 48V |
| Максимальна швидкість | 45 об/хв | 88 об/хв |
| Номінальний крутний момент | 25N·м | 25N·м |
| Номінальна швидкість | 45 об/хв | 74 об/хв |
| Номінальний струм | 4A | 4.8A |
| Максимальна потужність | 140W | 500W |
| Максимальний крутний момент | 40N·м | 40N. |
| Швидкість постійна | 67об/хв/В | 67об/хв/В |
| Крутний момент постійний | 0.175Н.м/А | 0.146Н.м/А |
| Обертів | 15 | 15 |
| Тип обмотки | Y | Y |
| Опір фази | 0.63Ω | 0.63Ω |
| Індуктивність фази | 0.28мГн | 0.28мГ |
| Полюси двигуна | 28 | 28 |
| Інерція ротора | 930 | 908 |
| Температура двигуна | ТАК | ТАК |
| Тип редуктора | PG4136 | PG4136 |
| Передаточне співвідношення | 1:36 | 1:36 |
| Зазор | ≤12 дугових хвилин | ≤12 дугових хвилин |
| Номінальне навантаження підшипника | 1770N | 1770N |
| Вага двигуна | 503г | 503г |
| Рекомендований привід | DG60 | DG60 |
| Вхідна напруга приводу | 12-60V | 12-60V |
| Зв'язок | RS485 АБО CAN | RS485 АБО CAN | Частота зв'язку | RS485:500Гц(115200біт/с)/CAN:2КГц(1Мбіт/с) | RS485:500Гц(115200біт/с)/CAN:2КГц(1Мбіт/с) |
| Енкодер | 18-бітний магнітний енкодер | 18-бітний магнітний енкодер |
| Швидкість передачі даних енкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбіт/с | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбіт/с |
| Швидкість передачі даних (CAN) | 100К, 125К, 250К, 500К, 1М | 100К, 125К, 250К, 500К, 1М |
| Режим управління | Контур моменту (32КГц)/Контур швидкості (8КГц)/Контур позиції (4КГц) | Контур моменту (32КГц)/Контур швидкості (8КГц)/Контур позиції (4КГц) |
| Крива прискорення | Трапецієподібне прискорення | Трапецієподібне прискорення |
Визначення інтерфейсу
CAN/RS485 та перемикач ID надаються (вказано). Інтерфейсні нотатки:
| Інтерфейс | Примітка |
|---|---|
| A/H | RS485-A або CAN-H |
| B/L | RS485-B або CAN-L |
| V- | Негативне живлення |
| V+ | Позитивне живлення |
| T | UART передавач |
| R | UART приймач |
| G | Сигнальний GND |
Посібники / Документи
Для питань інтеграції (налаштування CAN/RS485, вибір швидкості передачі, або сполучення контролера), звертайтеся до [email protected] or відвідайте https://rcdrone.top/.
Деталі

MG6012-i36-V3 інтегрує безщітковий двигун, планетарний редуктор та комунікацію енкодера для роботизованих суглобів.
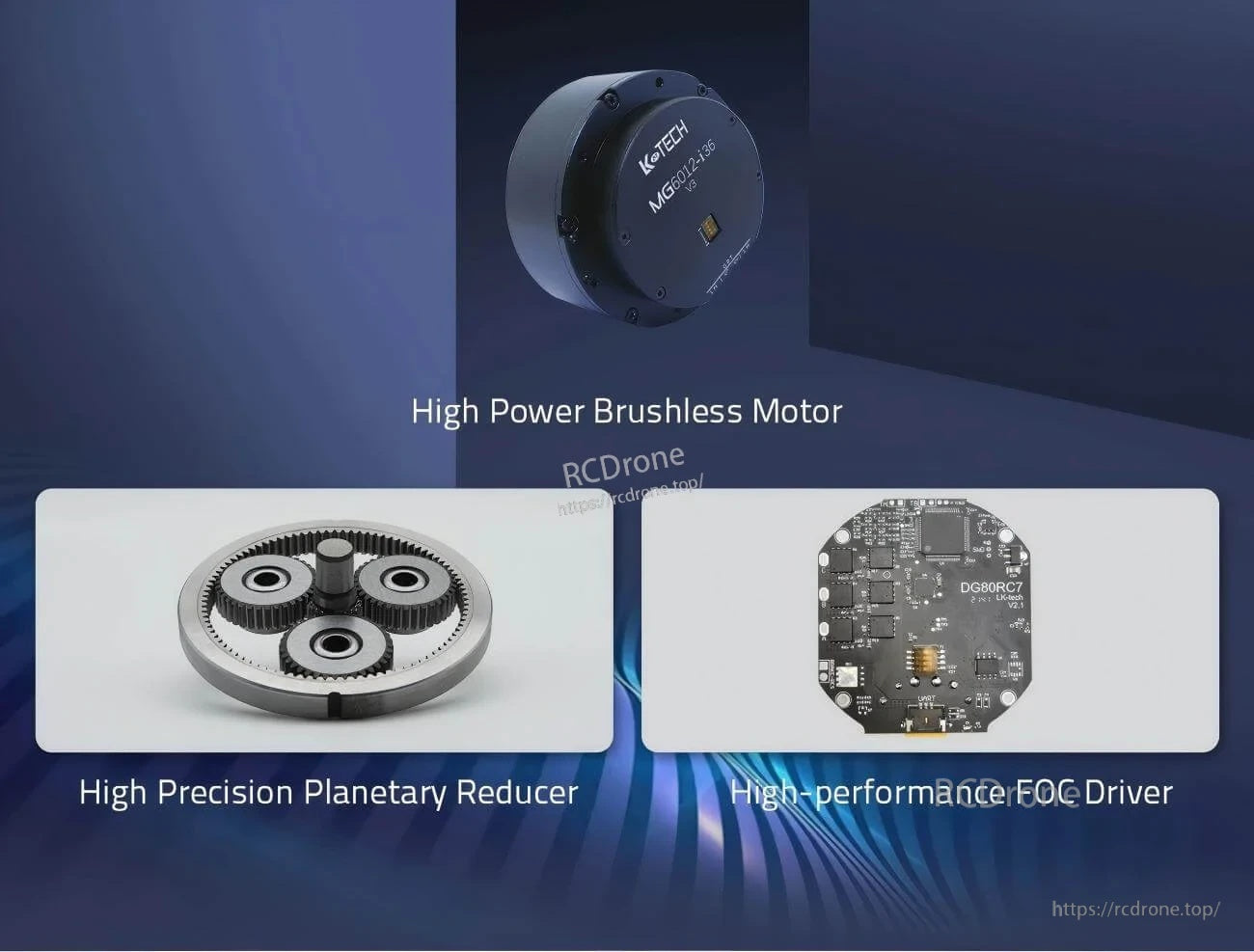
Компактна система приводу, побудована навколо високопотужного двигуна, прецизійного планетарного редуктора та драйвера FOC.
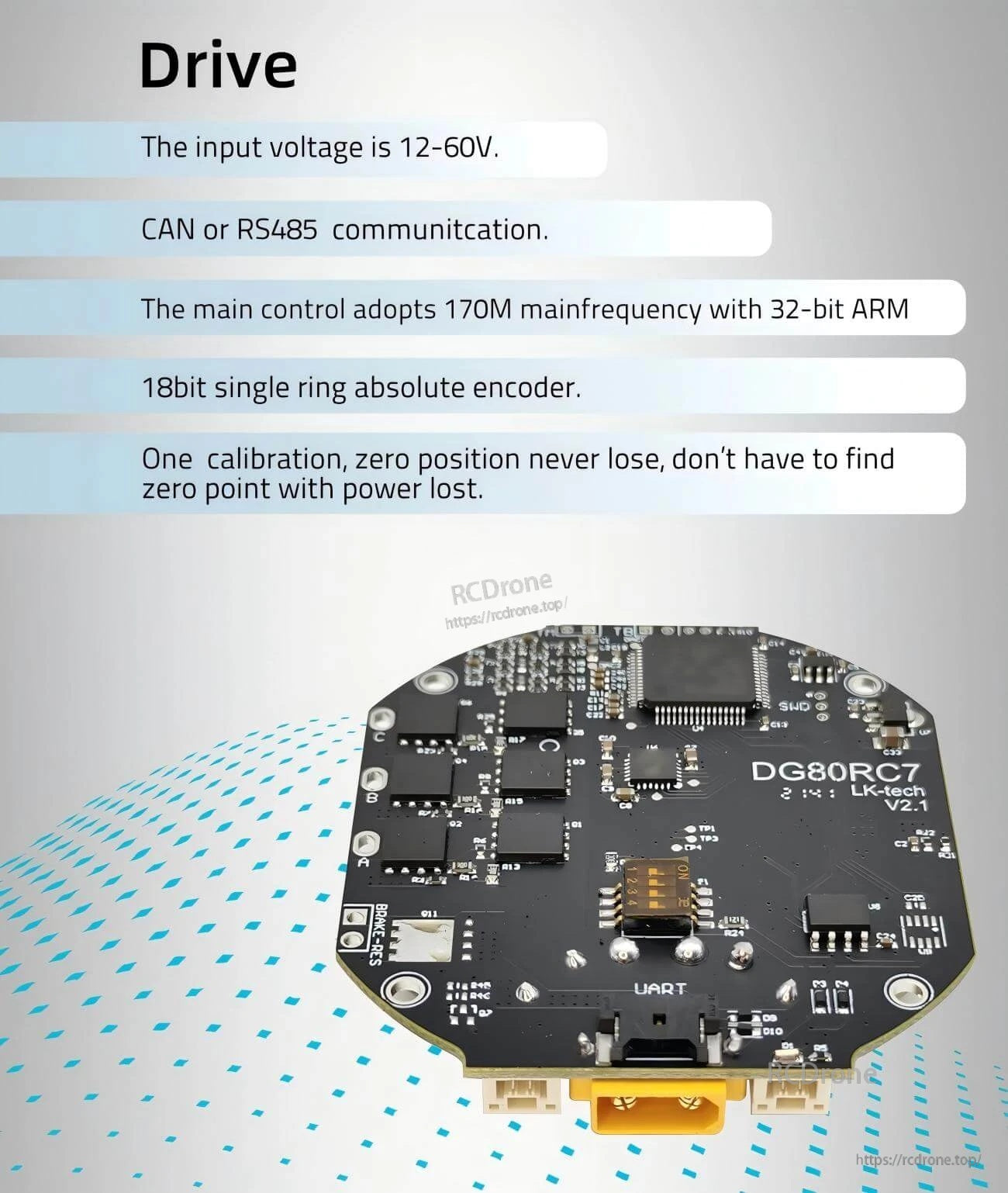
Електроніка контролера підтримує вхід 12–60V з комунікацією CAN або RS485, а також опцію абсолютного енкодера на 18 біт.
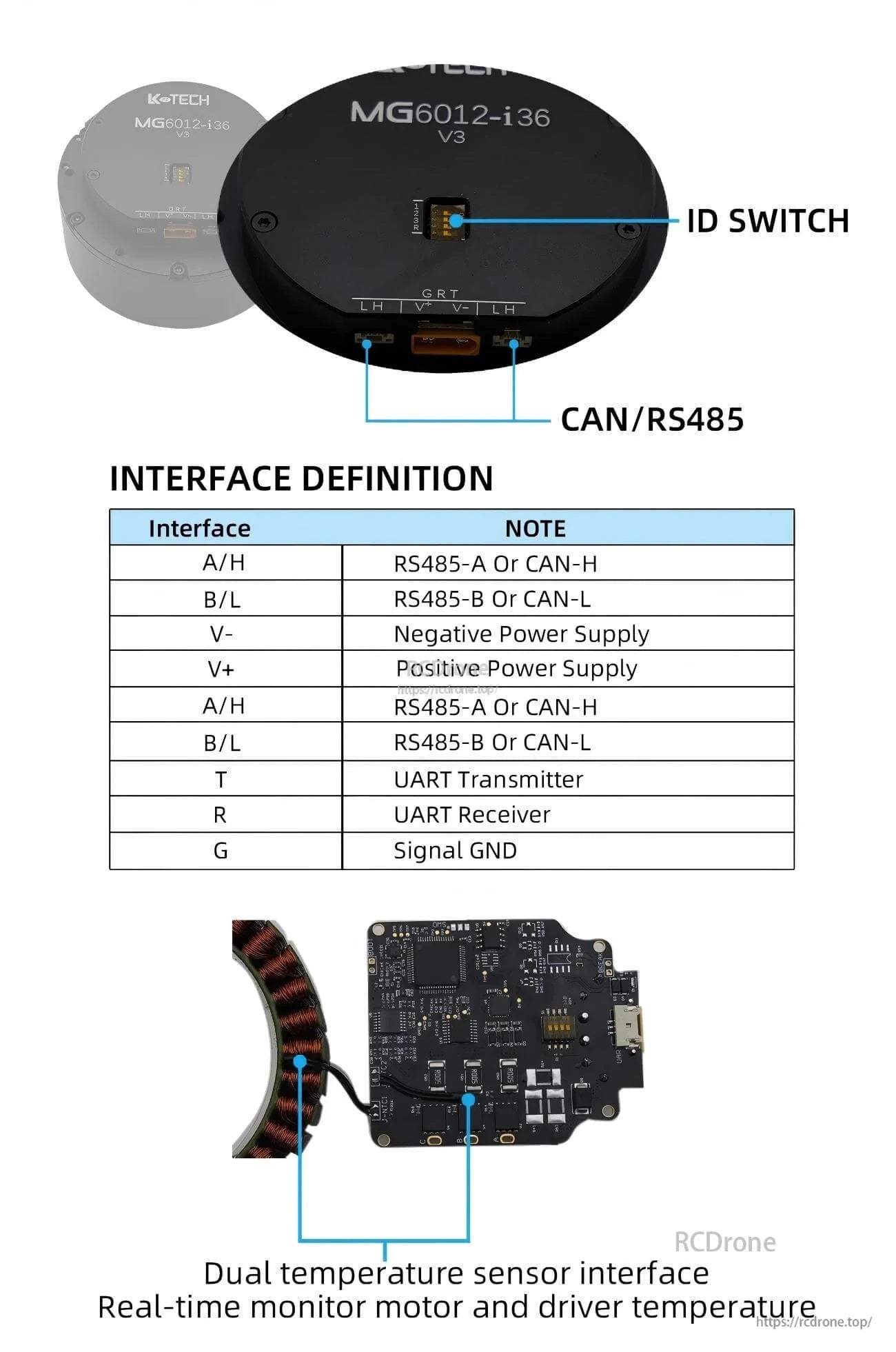
Чіткі визначення контактів та вбудований перемикач ID допомагають спростити підключення та налаштування багатонодових систем CAN/RS485.

Планетарний редуктор 1:36 розроблений для низького зворотного ходу та високого крутного моменту в прецизійних рухових системах.
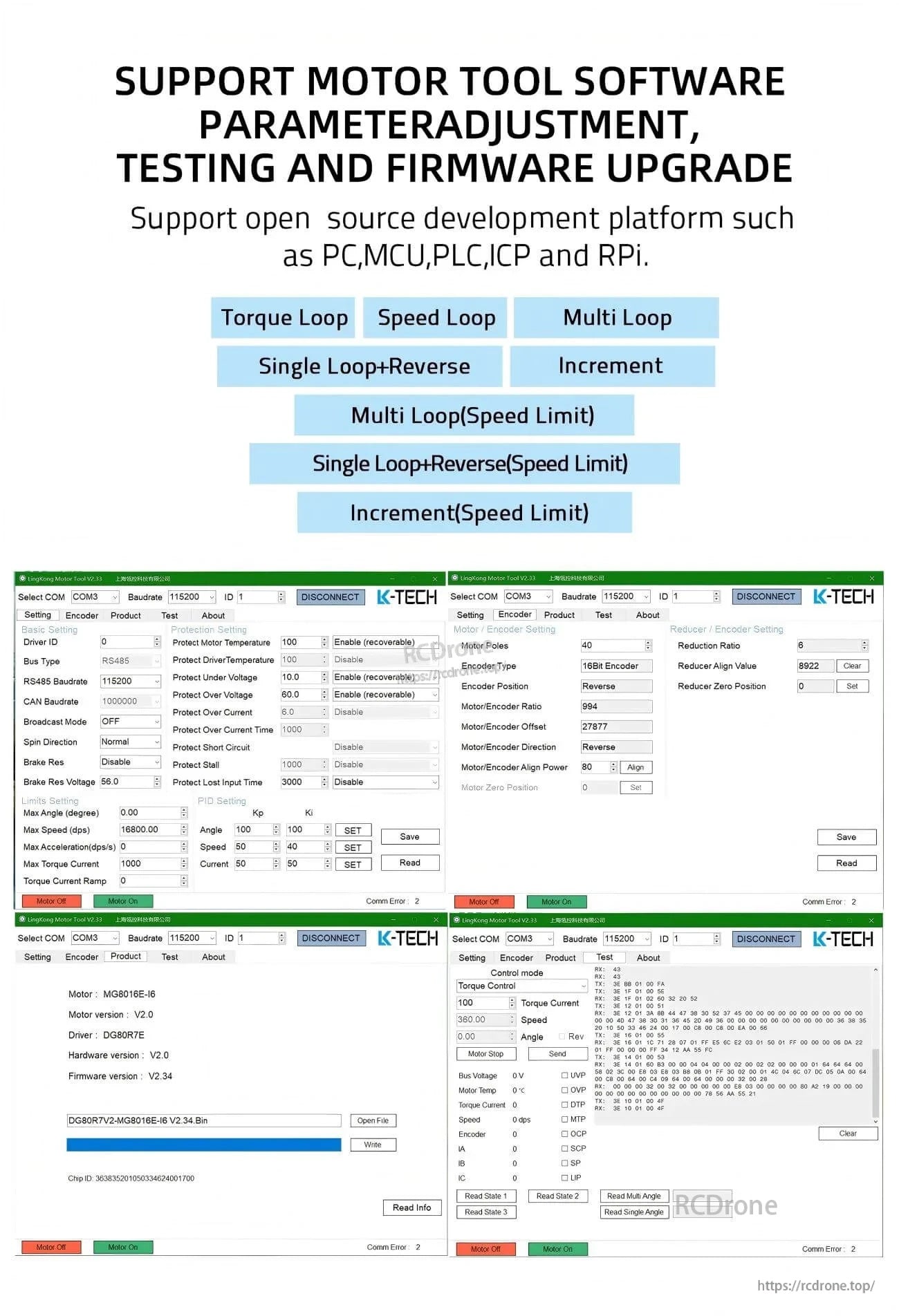
Програмне забезпечення для конфігурації підтримує налаштування параметрів, тестування режиму замкнутого контуру та оновлення прошивки на загальних платформах розробки.
Підходить для роботизованих застосувань, таких як AGV, роботизовані руки, чотириногі роботи та носимі/екзоскелетні механізми.
Related Collections




