




Двигун MagicLab P110 360 Н·м пікового крутного моменту, подвійний енкодер, CAN/EtherCAT привід суглоба для людиноподібних роботів
Двигун MagicLab P110 360 Н·м пікового крутного моменту, подвійний енкодер, CAN/EtherCAT привід суглоба для людиноподібних роботів
MagicLab
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
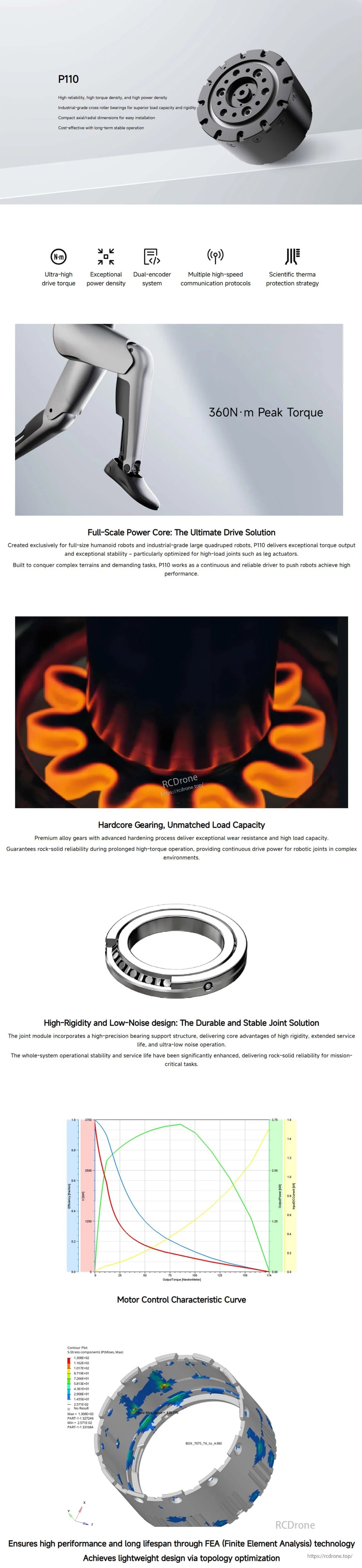
MagicLab P110 Motor - це мотор з високим крутним моментом, призначений для роботизованих суглобів, який має систему з двома енкодерами та варіанти високошвидкісного зв'язку (CAN / EtherCAT). Він розроблений для суглобів з високим навантаженням, таких як актуатори ніг у повнорозмірних гуманоїдних роботах та промислових великих чотириногих роботах.
Ключові особливості
- 360 Н·м піковий крутний момент
- Ультра-високий крутний момент і виняткова щільність потужності
- Двокодовий система (роздільна здатність енкодера двигуна: 15 біт)
- Комунікаційний інтерфейс: CAN / EtherCAT (багато високошвидкісних комунікаційних протоколів)
- Наукова стратегія термічного захисту
- Жорстка передача для вантажопідйомності (преміум сплави з просунутим процесом загартування)
- Висока жорсткість, низький рівень шуму з високоточними підшипниками
- Технологія FEA (метод скінченних елементів) для високої продуктивності та тривалого терміну служби; легка конструкція при збереженні міцності
Застосування
- Гуманоїдні роботи
- Роботизовані руки
- Екзоскелети
- Чотириногі роботи
- AGV транспортні засоби
- ARU роботи
Технічні характеристики
| Максимальна швидкість | 20 об/хв (живлення 24В) |
| Вага модуля | 1900г |
| Номінальний крутний момент | 90 Н·м |
| Піковий крутний момент | 360 Н·м |
| Розміри | Φ112*71.5 |
| Робоча напруга | 48V - 54V |
| Піковий струм | 137 A |
| Комунікаційний інтерфейс | CAN / EtherCAT |
| Конфігурація енкодера | Двійний енкодер |
| Роздільна здатність енкодера мотора | 15 біт |
| Частота керування | 25,000 Гц |
| Рекомендоване робоче середовище | -5°C ~ 40°C |
Для питань інтеграції, інтерфейсу або конфігурації, звертайтеся [email protected] or відвідайте https://rcdrone.top/.
Деталі
Створений для високонавантажених гуманоїдних та чотириногих суглобів, MagicLab P110 поєднує піковий момент 360 Н·м з зворотним зв'язком від двох енкодерів та комунікацією CAN/EtherCAT для точного, чутливого актуатора.
Related Collections




