MATEK Mateksys AP_PERIPH CAN NODE L431
MATEK Mateksys AP_PERIPH CAN NODE L431
MATEKSYS
Не вдалося завантажити інформацію про можливість самовивозу
ТЕХНІЧНІ ХАРАКТЕРИСТИКИ MATEK Mateksys AP_PERIPH CAN NODE L431
Використання: Транспортні засоби та іграшки з дистанційним керуванням
Рекомендований вік: 12+y,14+y,3-6y,6-12y,0-3y
Походження: Материковий Китай
Матеріал: Композитний матеріал
Назва торгової марки: MATEKSYS
AP_PERIPH CAN NODE L431
AP_Periph, вузол CAN, DroneCAN, L431


-
CAN-L431 — це вузол адаптера на основі мікропрограми ArudPilot AP_Periph.
-
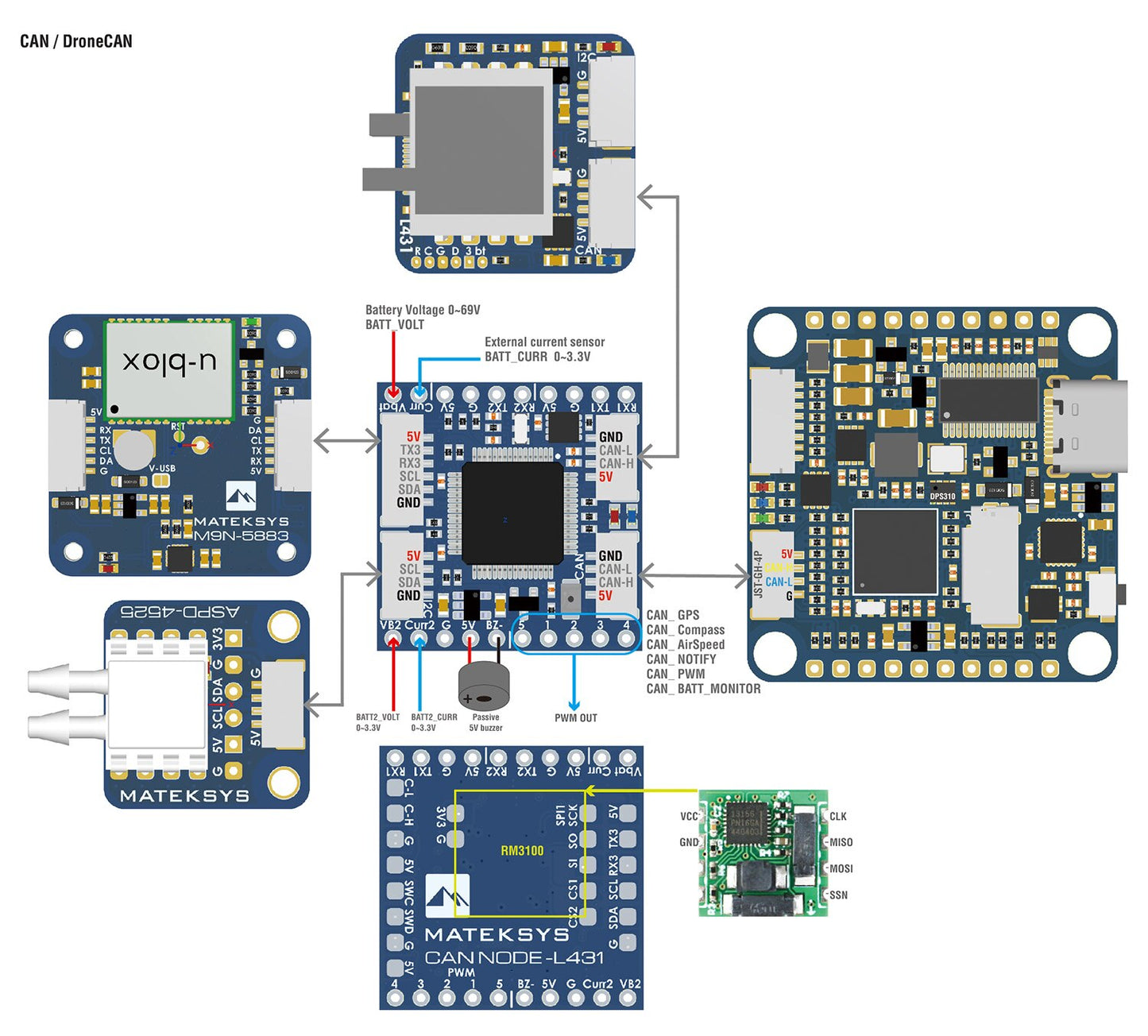
За допомогою цієї плати ви можете легко використовувати бібліотеку драйверів ArduPilot для перетворення підтримуваних ArduPilot периферійних пристроїв GNSS, компаса, барометра, датчика повітряної швидкості та GPIO (PWM, зумер/світлодіодне сповіщення) на периферійні пристрої шини DroneCAN.
Технічні характеристики
-
MCU: STM32L431xC, 256 КБ Flash
-
Швидкість передачі даних трансивера CAN до 5 Мбіт/с у швидкій фазі CAN FD
-
1x CAN, DroneCAN Protocol (2x GH-4P роз’єми паралельно)
-
3x UART
-
UART1, запасний
-
UART2, MSP за замовчуванням, DFU
-
UART3, GPS за замовчуванням
-
-
1x I2C
-
для периферійного датчика повітряної швидкості
-
для периферійного барометра
-
для периферійного Compass QMC5883L
-
-
1x SPI
-
для периферійного RM3100
-
-
4x АЦП
-
BATT_VOLT, PIN 5
-
BATT_CURR, PIN 6
-
BATT2_VOLT, PIN 15
-
BATT2_CURR, PIN-код 16
-
-
5x ШІМ-виходів
-
1x GPIO з TIM16 для зумера
-
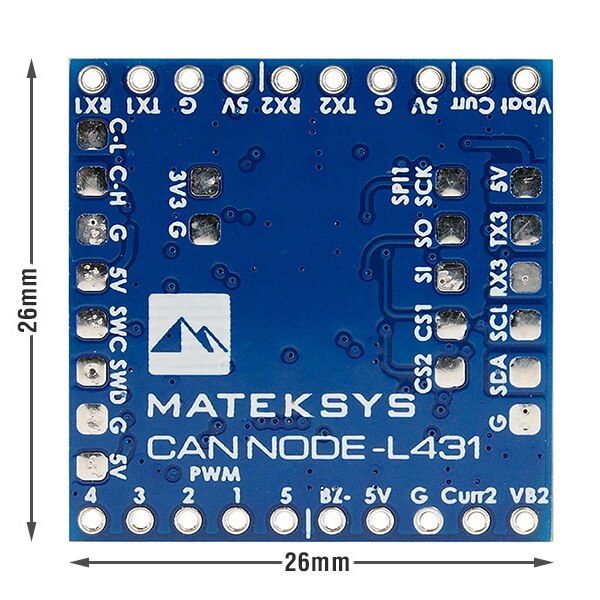
Налагодження ST, SWCLK і SWDIO
-
Світлодіод
-
Синій, швидко блимає, завантаження
-
Синій, повільно блимає, працює
-
Червоний, індикатор 3,3 В
-
Діапазон вхідної напруги: 4,5~5,5 В @ 5 В колодка/контакт
-
Споживання електроенергії: 40 мА
-
Робочі температури
-
Фізичний
-
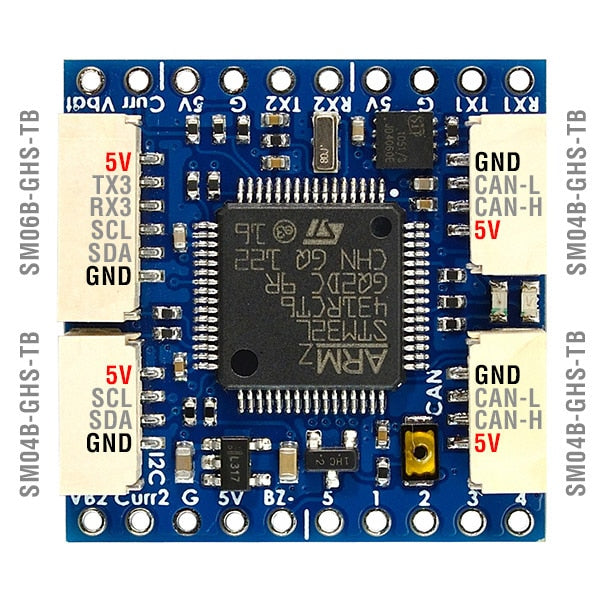
2x JST-GH-4P(SM04B-GHS-TB) для CAN
-
1x JST-GH-4P(SM04B-GHS-TB) для I2C
-
1x JST-GH-6P(SM06B-GHS-TB) для UART3+I2C
-
Розмір плати: 26 мм*26 мм*6 мм. 3,7 г
-
3D-файл: CAN-L431_STEP.zip
-
-
Прошивка
-
ArduPilot AP_Periph MatekL431-Periph, або MatekL431-Airspeed
-
Оновити за допомогою DroneCAN GUI Tool
-
Упаковка
-
1x плата CAN-L431
-
1x JST-GH-4P до JST-GH-4P 20 см силіконового дроту
-
1x JST-GH-6P до JST-GH-6P 20 см силіконового дроту
Поради
-
Програмне забезпечення MatekL431-Periph підтримує компас I2C QMC5883L за замовчуванням
-
Якщо ви підключите інший компас I2C до цієї плати, вам потрібно оновити його за допомогою цієї мікропрограми через DroneCAN GUI або режим SLCAN у Mission Planner.
-
Related Collections