MATEK M10-L4-3100 GPS модуль - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEK M10-L4-3100 GPS модуль - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Не вдалося завантажити інформацію про можливість самовивозу
MATEK M10-L4-3100 - СПЕЦИФІКАЦІЇ Mateksys AP_PERIPH GNSS
Використання: Транспортні засоби та іграшки з дистанційним керуванням
Рекомендований вік: 12+р,14+р,6-12р
Походження: Материковий Китай
Матеріал: Композитний матеріал
Назва торгової марки: MATEKSYS
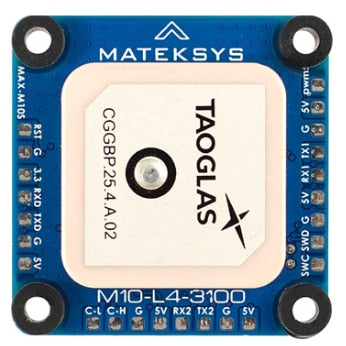
AP_PERIPH GNSS M10-L4-3100
Вузол CAN AP_Periph L431, MAX-M10S, RM3100, SPL06-001, протокол DroneCAN & UART_MSP
-
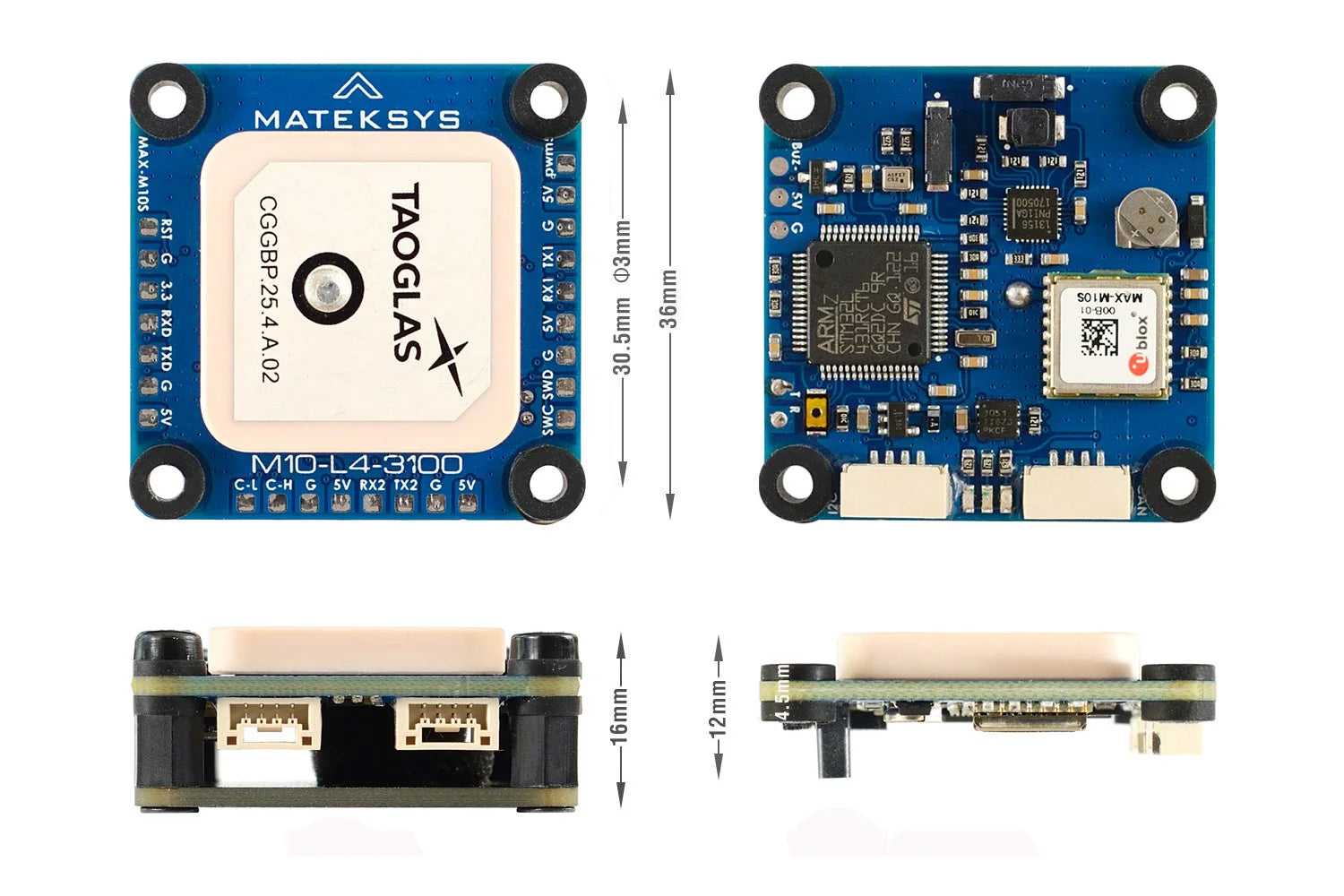
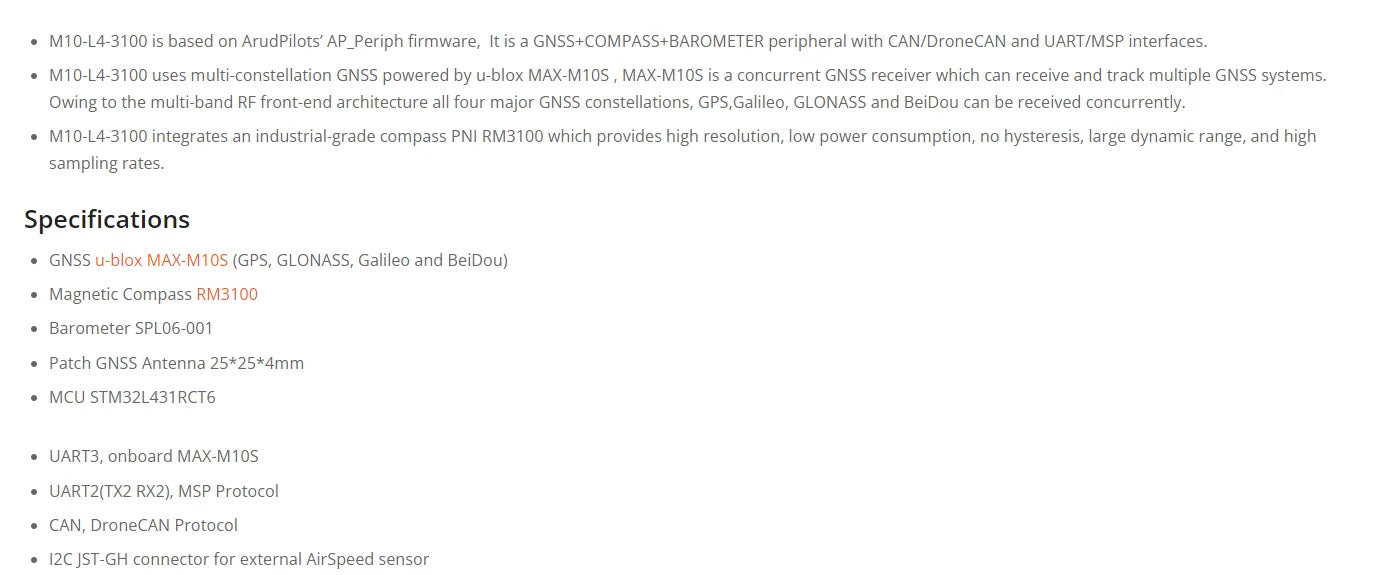
M10-L4-3100 базується на мікропрограмі AP_Periph від ArudPilots. Це периферійний пристрій GNSS+КОМПАС+БАРОМЕТР з інтерфейсами CAN/DroneCAN та UART/MSP.
-
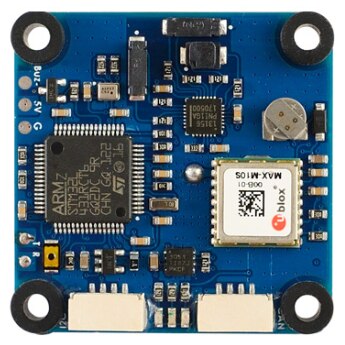
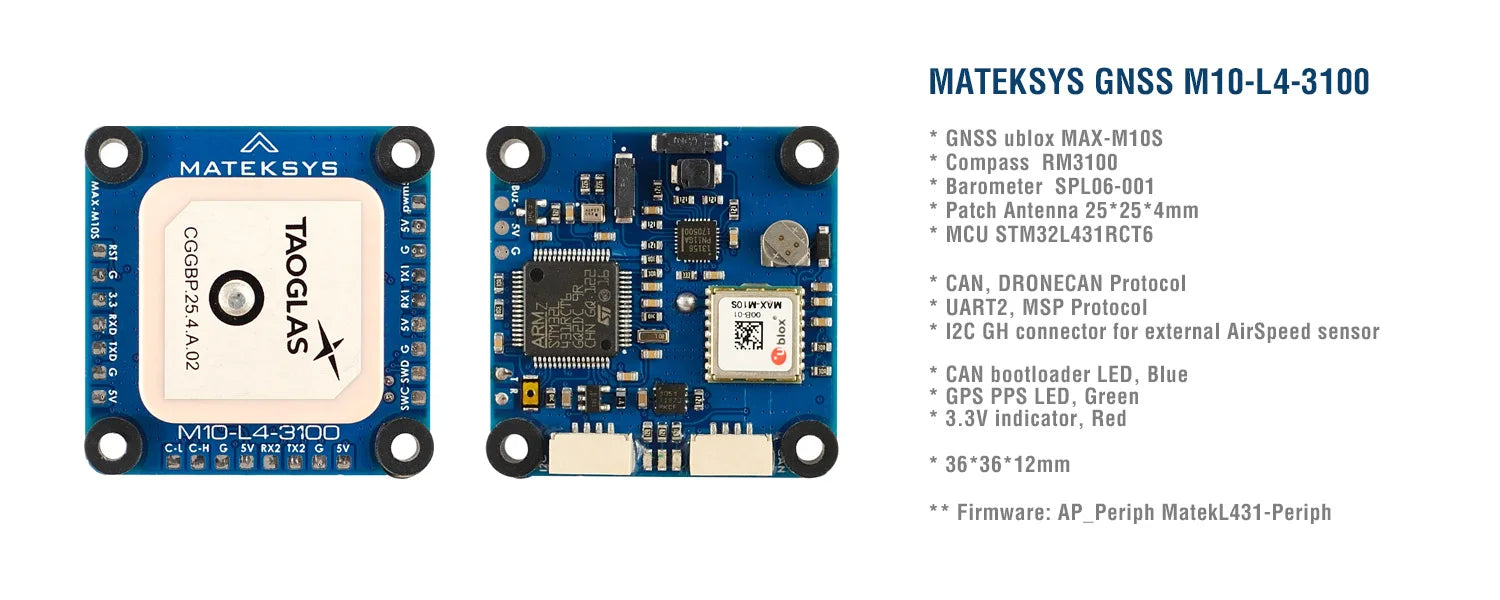
M10-L4-3100 використовує GNSS із кількома сузір’ями на базі u-blox MAX-M10S, MAX-M10S — це одночасний приймач GNSS, який може приймати та відстежувати декілька систем GNSS. Завдяки багатодіапазонній інтерфейсній архітектурі радіочастот усі чотири основні угруповання GNSS, GPS, Galileo, GLONASS і BeiDou можуть прийматися одночасно.
-
M10-L4-3100 містить промисловий компас PNI RM3100, який забезпечує високу роздільну здатність, низьке енергоспоживання, відсутність гістерезису, великий динамічний діапазон і високу частоту дискретизації.

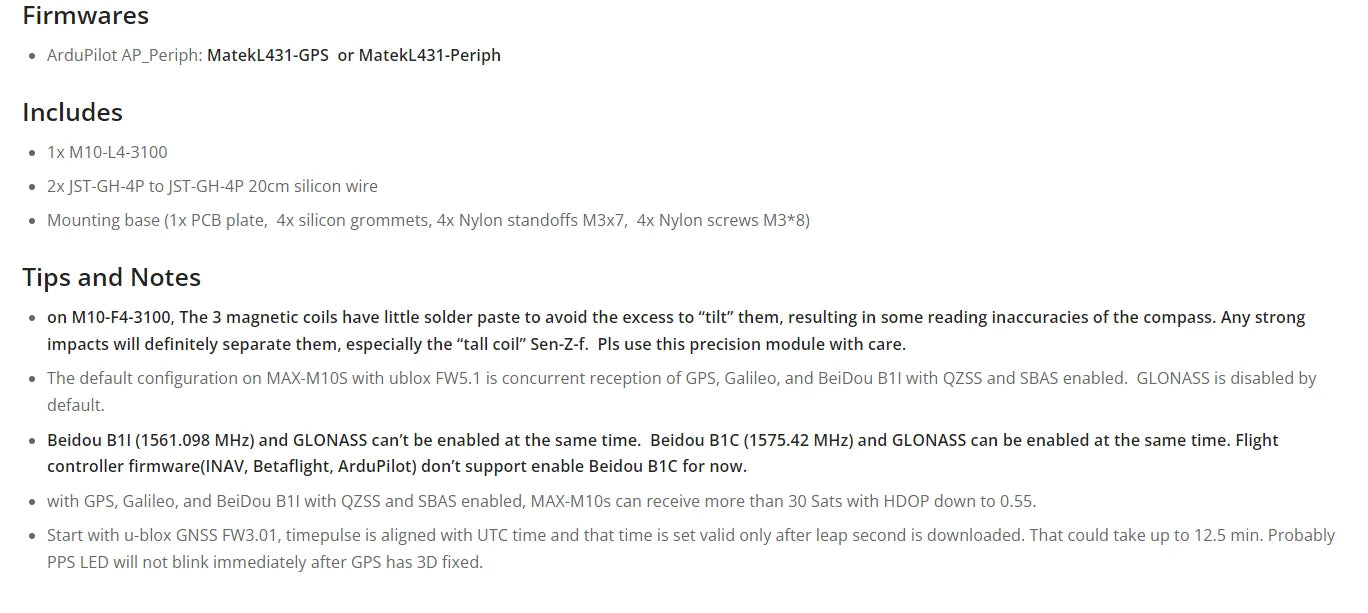
конфігурація за замовчуванням у MAX-M1OS з ublox FWS . є одночасний прийом GPS, Galileo та BeiDou BI з увімкненими QZSS та SBAS. ГЛОНАСС вимкнено за замовчуванням Beidou B1I (1575,42 МГц) і не може бути ввімкнено одночасно.
З'єднання CAN (протокол UAVCAN)
-
M10-L4-3100 5 В — FC 4,5 В ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN High
-
M10-L4-3100 CAN-L — FC CAN Low
-
M10-L4-3100 G — FC G/GND
Параметри FC UAVCAN (ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (переконайтеся, що DroneCAN знято)
—————————————————————————–
Якщо ви підключите датчик швидкості польоту I2C до порту I2C M10-L4-3100
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
Ви повинні встановити параметри вузла CAN для датчика повітряної швидкості, підключеного до порту I2C M10-L4-3100
Планувальник завдань > Початкове налаштування > Додаткове обладнання > UAVCAN > Режим SLCan CAN1 > Параметри
-
MS4525 ARSP_TYPE -> 1 (за замовчуванням у hwdef)
-
MS5525 ARSP_TYPE -> 3 підтримує лише MS5525 з адресою 0x77
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Записати та перезавантажити
—————————————————————————–
Якщо підключити 2812LED DIN до панелі PWM5
-
NTF_LED_TYPES -> (переконайтеся, що DroneCAN позначено)
SLCan Mode CAN1 > Параметри
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph fw має бути “MatekL431-Periph”, функцію MSP вимкнено в “MatekL431-GPS”
З'єднання UART (протокол MSP)
-
M10-L4-3100 5 В — FC 4,0 В ~ 5,3 В
-
M10-L4-3100 TX2 — FC запасний UART_RX
-
M10-L4-3100 RX2 — FC запасний UART_TX (не обов’язково)
-
M10-L4-3100 G — FC G/GND
Параметри FC ArduPilot (починаючи з 4.1.x)
-
Serialx_PROTOCOL = 32 (MSP), де x – це SERIAL порт, який використовується для підключення на автопілоті.
-
Serialx_BAUD = 115 де x – це SERIAL порт, який використовується для підключення на автопілоті.
-
ТИП GPS = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (Якщо ви хочете використовувати баро MSP як основний баро, інакше залиште значення за замовчуванням)
-
COMPASS_TYPEMASK 0 (або переконайтеся, що біт MSP не позначено)
Параметри FC INAV (починаючи з 2.6)
-
M10-L4-3100 сумісний з будь-яким контролером польоту, що підтримується INAV через запасний UART.
-
На вкладці «Порти» увімкніть MSP на відповідному UART, до якого підключено M10-L4-3100, НЕ вмикайте «GPS» на цьому UART. виберіть Швидкість передачі 115200.
-
функція GPS
-
set gps_provider = MSP
-
set mag_hardware = MSP
-
set baro_hardware = MSP
-
set align_mag = CW90, якщо компас встановлено рівно стрілкою вперед, і стрілка контролера польоту також спрямована вперед.
Related Collections