MATEK F405-WTE - КОНТРОЛЕР ПОльоту Mateksys
MATEK F405-WTE - КОНТРОЛЕР ПОльоту Mateksys
MATEKSYS
Не вдалося завантажити інформацію про можливість самовивозу
MATEK F405-WTE - ТЕХНІЧНІ ХАРАКТЕРИСТИКИ КОНТРОЛЕРУ ПОЛЬОТУ Mateksys
Використання: Транспортні засоби та іграшки з дистанційним керуванням
Рекомендований вік: 12+y,14+y
Походження: Материковий Китай
Матеріал: Композитний матеріал
Назва торгової марки: MATEKSYS
КОНТРОЛЕР ПОльоту F405-WTE
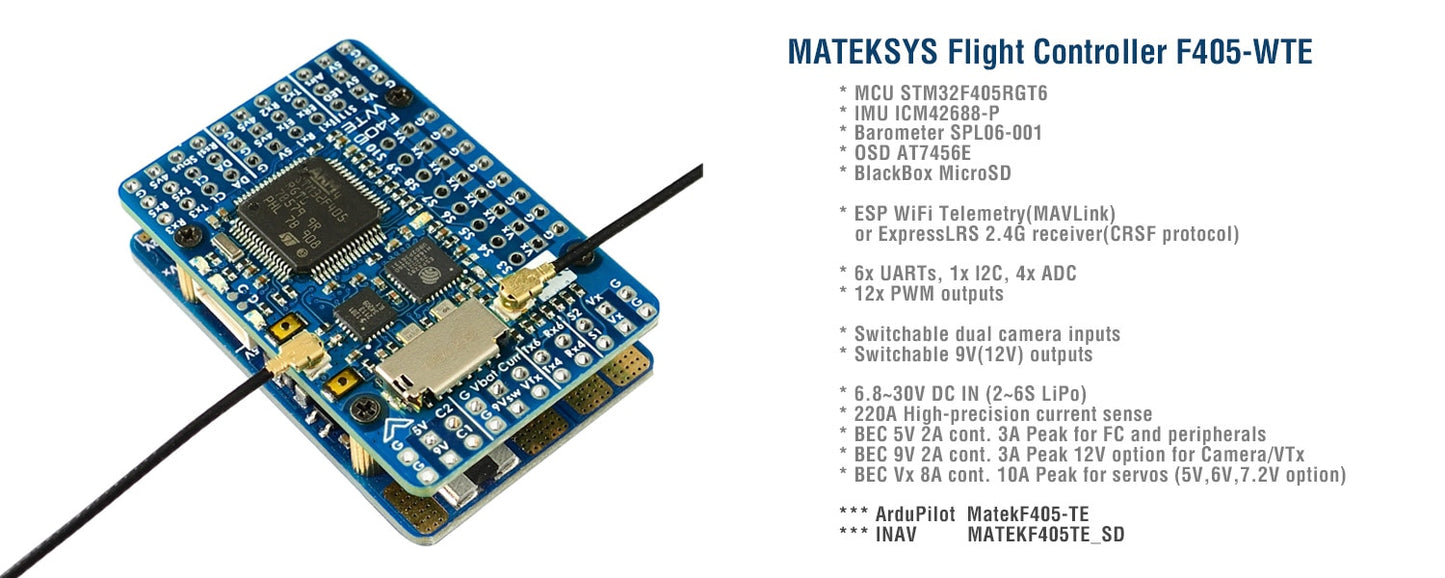
STM32F405RGT6, ICM42688P, SPL06, OSD, телеметрія ESP WIFI/приймач ELRS 2.4G, 6xUART, 12x PWM, 1xI2C
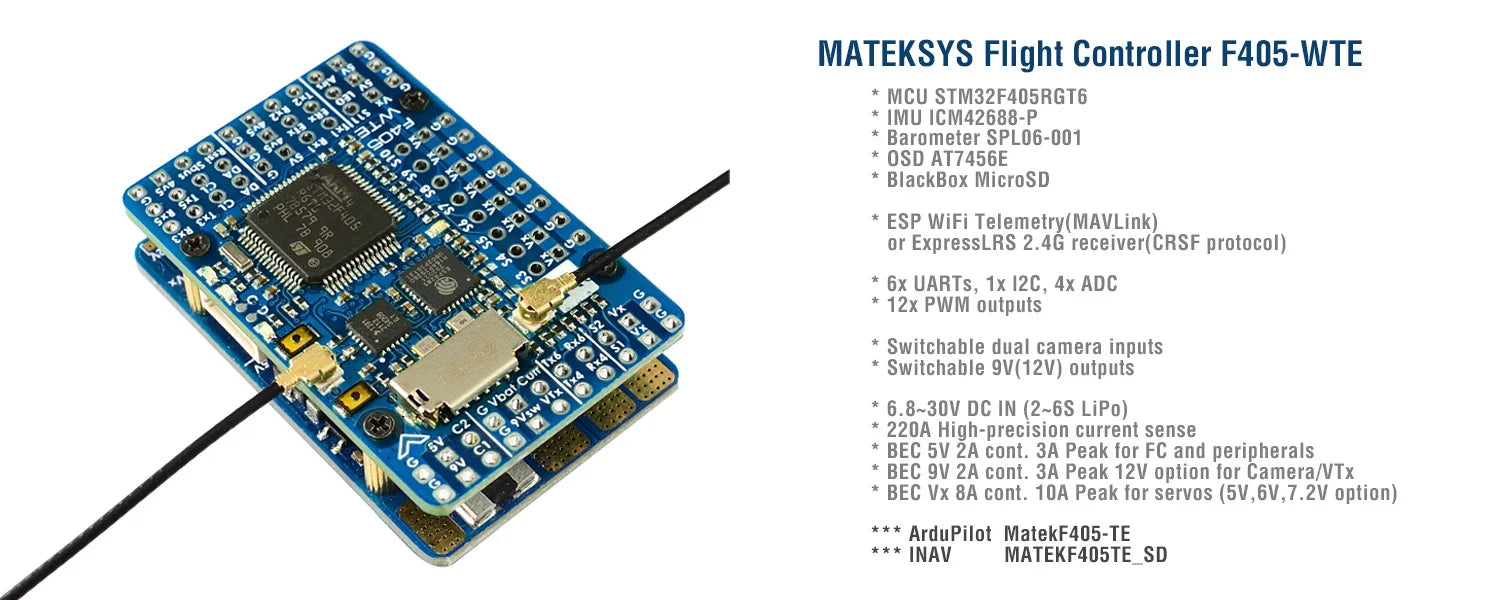
Контролер польоту MATEKSYS F4O5-WTE MCU STM3ZFAOSRGT6 IMU ICM42688-P Барометр SPLO6-001 OSD AT7456E BlackBox MicroSD 2 8 2 2 2 ESP WiFi Telemetry (MAVLink) 2 або приймач ExpressLRS 2.4G (протокол CRSF) 6x UART, Ix I2C , 4x ADC 85 12x PWM виходи Перемикаються подвійні входи камери 4+

Технічні характеристики FC
-
MCU: STM32F405RGT6, 168MHz, 1MB Flash
-
IMU: ICM42688-P
-
Баро: SPL06-001
-
ЕМ: AT7456E
-
Чорний ящик: гніздо для картки MicroSD
-
ESP WiFi Telemetry (MAVLink, 14dBm)
-
Приймач ExpressLRS 2.4G (протокол CRSF, телеметрія 12 дБм)
-
6x UART, 1x Softserial_Tx option (INAV)
-
12 виходів ШІМ
-
1x I2C
-
4x ADC (VBAT, струм, RSSI, повітряна швидкість)
-
USB/подовжувач звукового сигналу з Type-C(USB2.0)
-
Перемикач подвійних входів камери
-
9В(12В) для перемикача живлення VTX
Програмне забезпечення FC
-
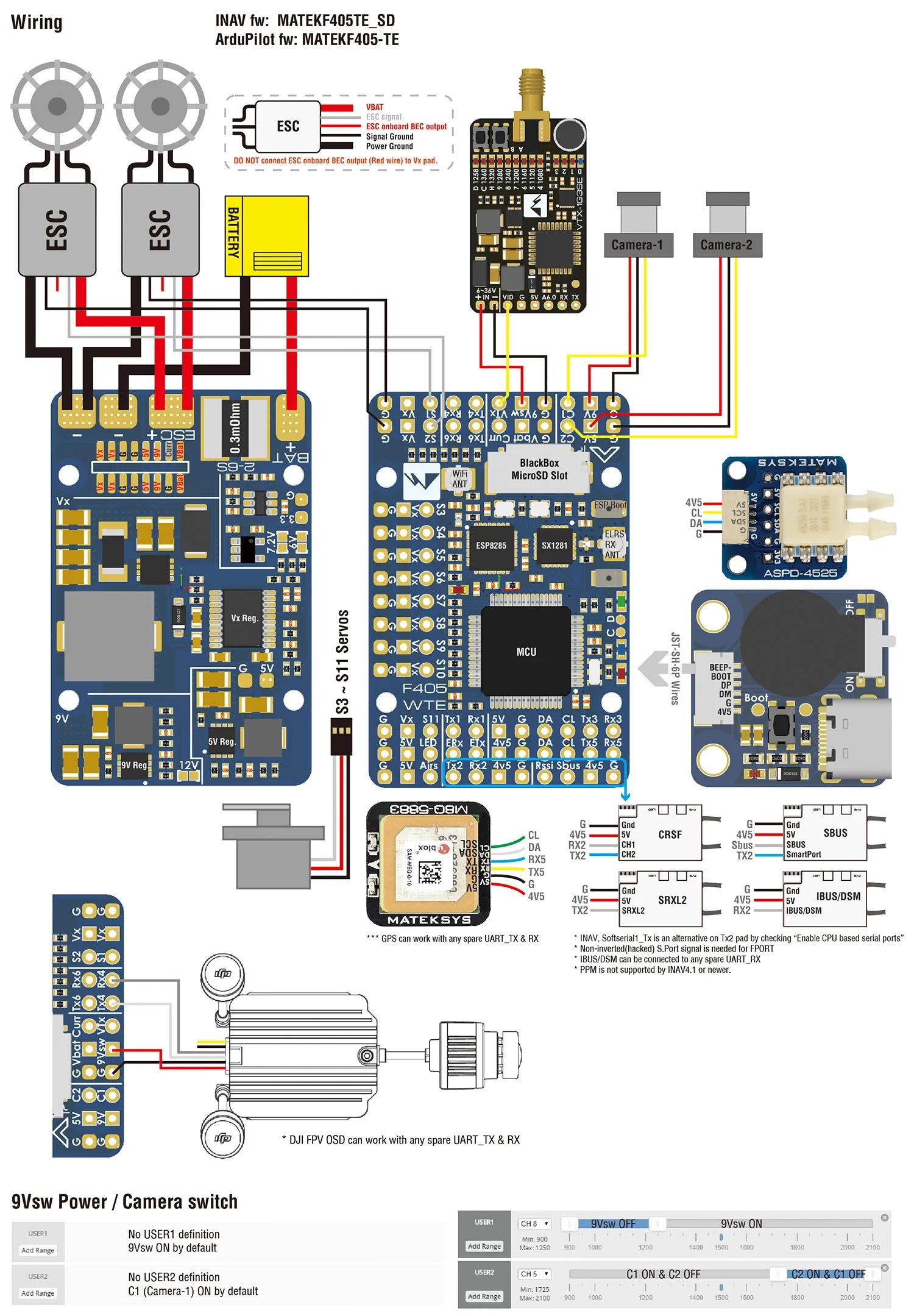
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE_SD (недоступно в конфігураторі INAV 4.x)
PDB
-
Діапазон вхідної напруги: 6,8~30 В (2~6S LiPo)
-
1x блок живлення ESC
-
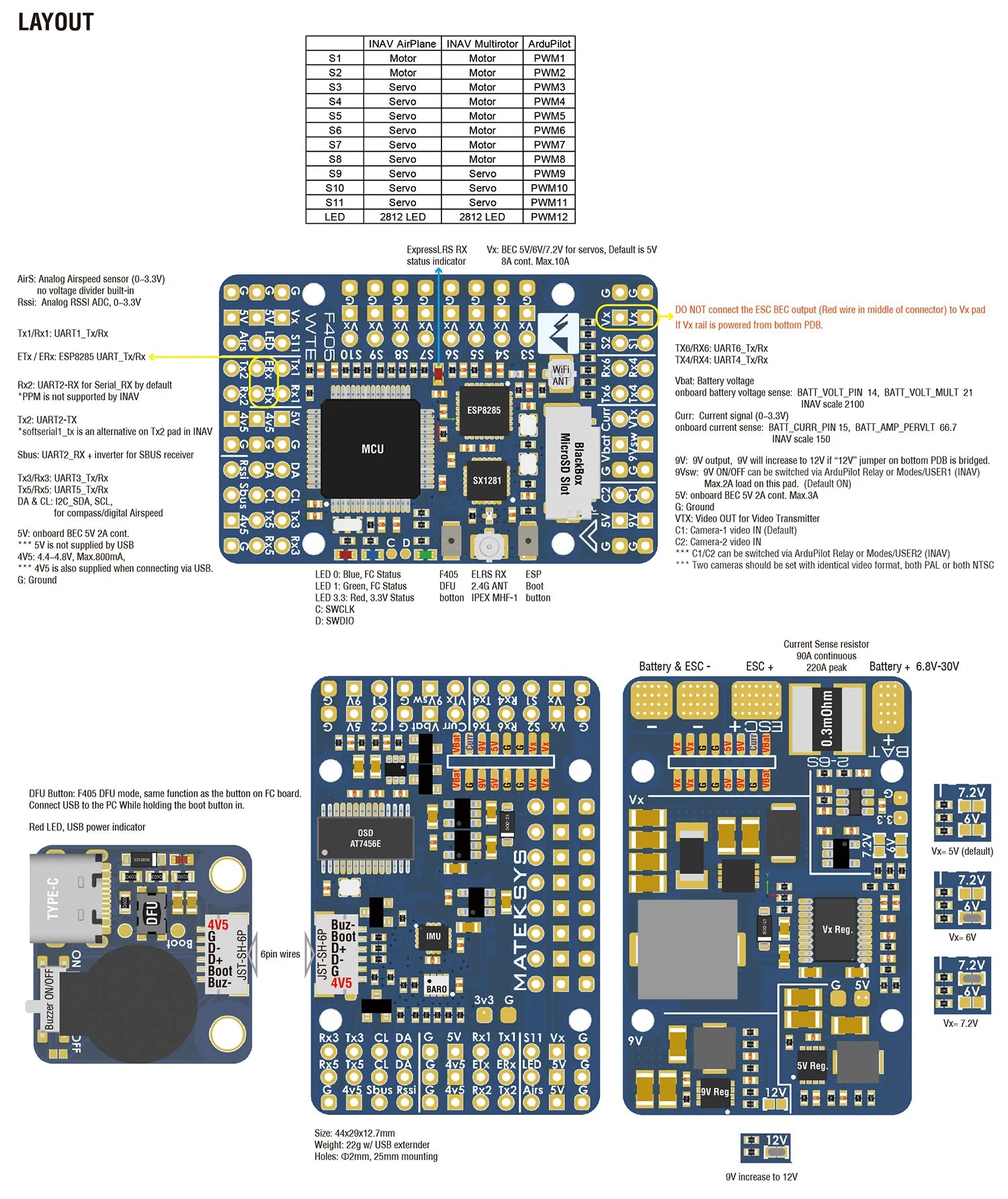
Дільник напруги батареї 1K:20K (Шкала 2100 в INAV, BATT_VOLT_MULT 21,0 в ArduPilot)
-
Сенор струму: 220 A, 3,3 В АЦП (Шкала 150 в INAV, 66,7 A/V в ArduPilot)
-
Сенсорний резистор: 90A постійно, 220A пік
Вихід BEC 5 В
-
Призначений для контролера польоту, приймача, екранного меню, камери, зумера, світлодіодної стрічки 2812, зумера, модуля GPS, AirSpeed
-
Безперервний струм: 2 А, макс. 3A
Вихід BEC 9В /12В
-
Призначений для відеопередавача, камери, підвісу тощо.
-
Безперервний струм: 2 А, макс. 3A
-
Варіант 12 В з перемичкою
-
для стабільного виходу 9 В/12 В вхідна напруга має > вихідної напруги +1 В
Вихід BEC Vx
-
Розроблено для сервоприводів
-
Напруга регулюється, 5 В за замовчуванням, 6 В або 7,2 В через перемичку
-
Безперервний струм: 8 А, макс. 10 A
-
для стабільного вихідного сигналу Vx вхідна напруга має > напруги Vx +1 В
Вихід BEC 3,3 В
-
Розроблено для модуля Baro / Compass і зовнішнього 3.Периферійні пристрої 3 В
-
Лінійний регулятор
-
Безперервний струм: 200 мА
Фізичні
-
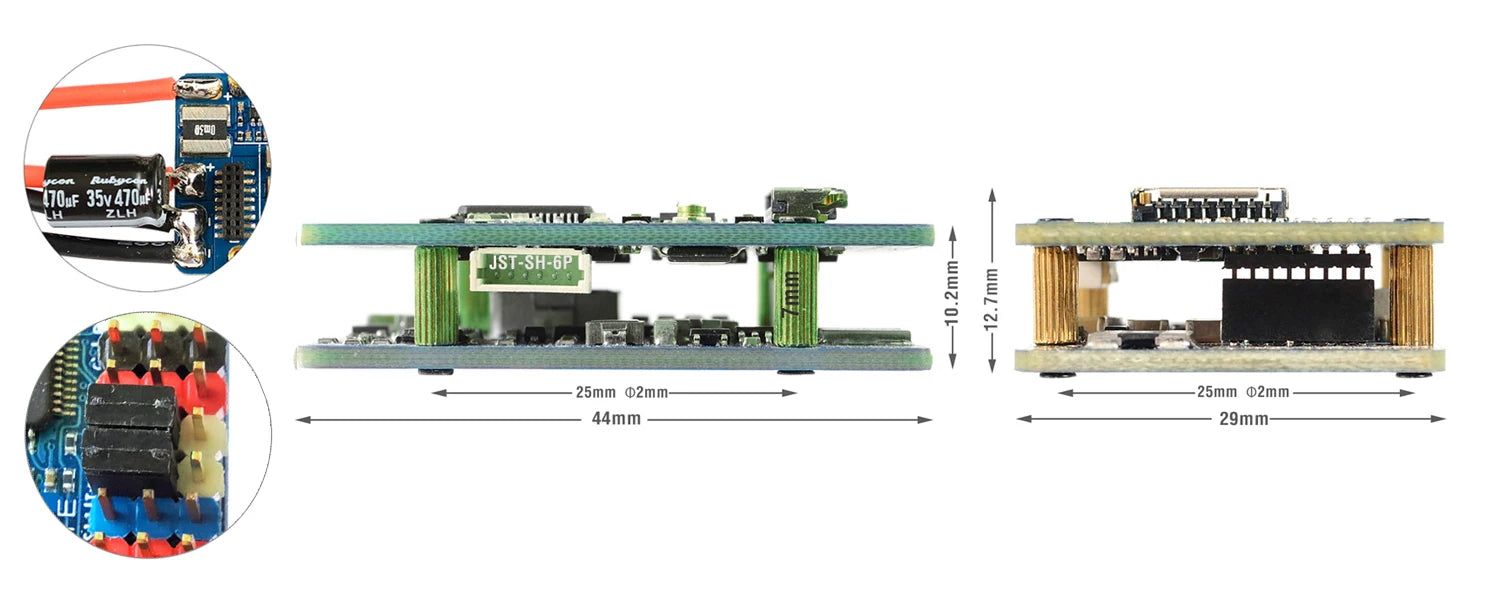
Кріплення: 25 x 25 мм, Φ2 мм
-
Розміри: 44 x 29 x 12,7 мм
-
Вага: 22 г з адаптером USB/зумером
Включаючи
-
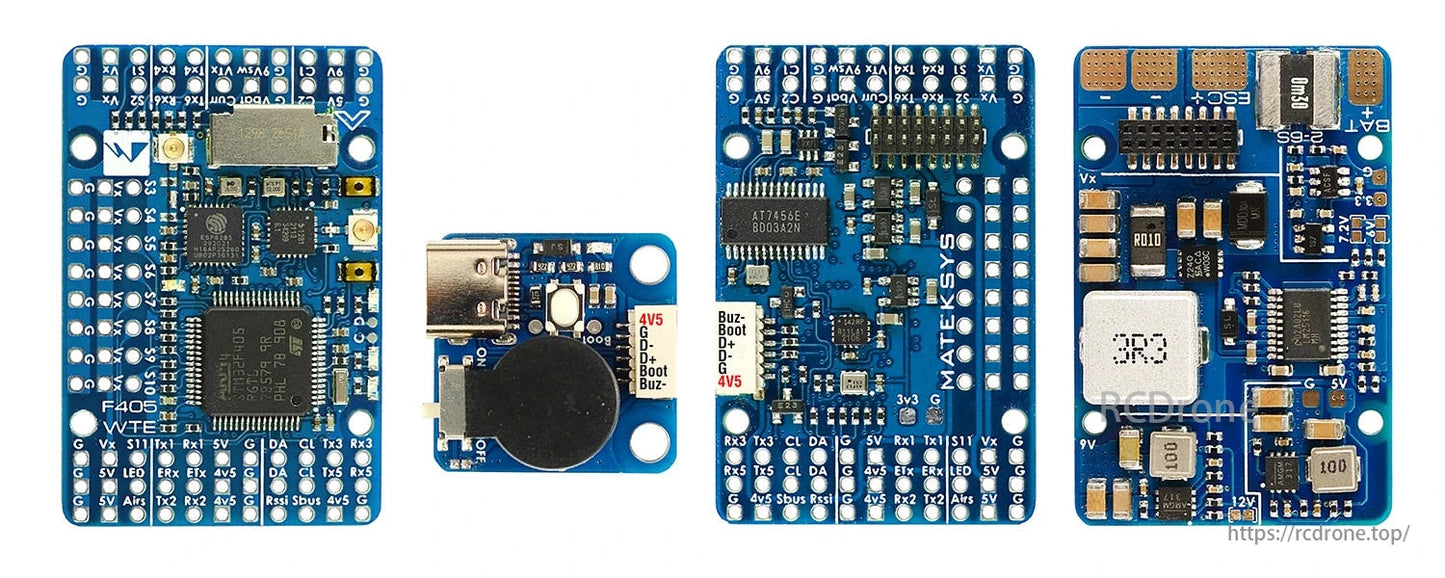
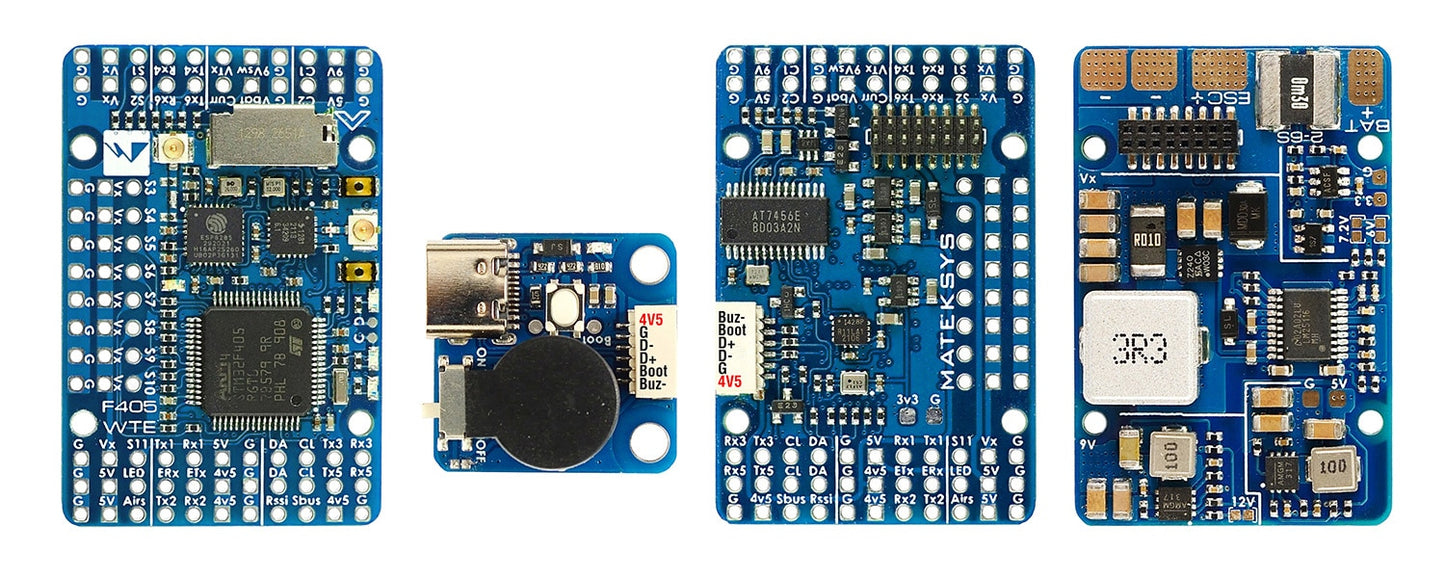
1x F405-WTE
-
1x USB(Type-C)/Beep (пасивний зумер) подовжувач + 20 см кабель JST-SH-6P до JST-SH-6P для USB-подовжувача.
-
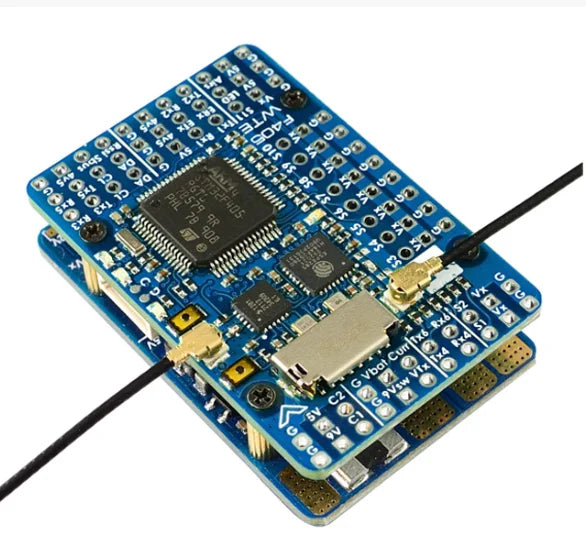
2 антени IPEX-MHF1 2.4G
-
1x конденсатор Rubycon ZLH 35V 470uF
-
Контакти Dupont 2,54 (плата постачається розпаяною)
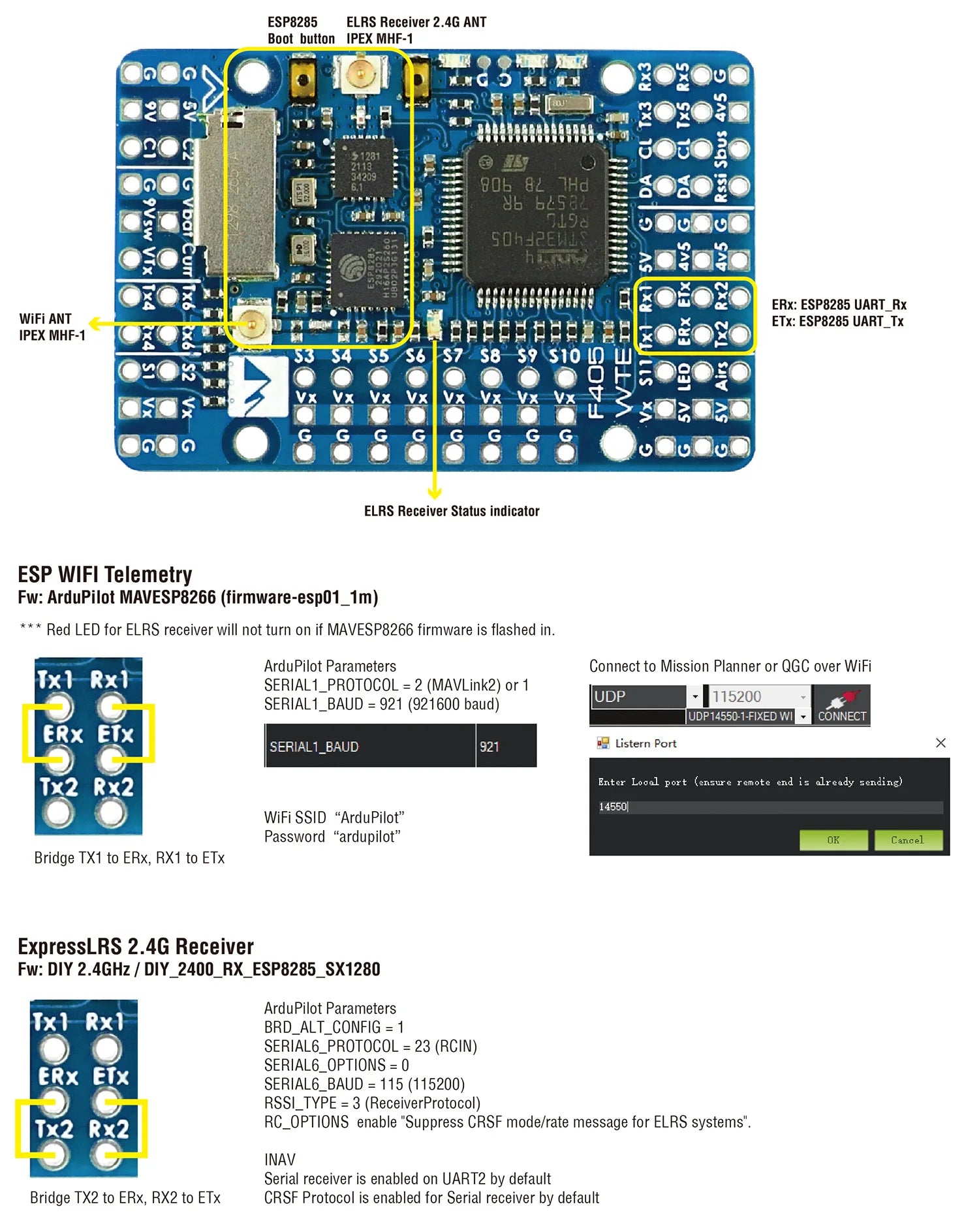
ArduPilot ESP8266 Wi-Fi телеметрія
-
https://ardupilot.org/copter/docs/common-esp8266-telemetry.html
-
Інструмент: ESP_NodeMCU-PyFlasher.exe
-
Прошивка: firmware-esp01_1m.bin
-
Прошивка за допомогою ESP_NodeMCU-PyFlasher
-
Підключіть ESP8285(ETx, ERx) до адаптера USB-TTL, при цьому ETx на F405-WTE під’єднайте до Rx на USB-TTL, а ERx – до Tx USB-TTL. Провід 4v5 і GND F405-WTE до 5V і GND USB-TTL
-
Підключіть адаптер USB-TTL до ПК, натиснувши та утримуючи кнопку завантаження ESP8285.
-
відкрити ESP_NodeMCU-PyFlasher
-
виберіть Послідовний порт модуля USB-TTL, завантажте прошивку, виберіть «Подвійний вихід (DOUT)» та «Так. видаляє всі дані“
-
клацніть “Flash NodeMCU“
-
після мигання вимкніть, а потім увімкніть F405-WTE через USB або акумулятор.
-
Зачекайте кілька секунд, знайдіть WiFi SSID “ArduPilot”, а пароль – “ardupilot”
-
Поради: червоний світлодіод для приймача ELRS не вмикатиметься, якщо вбудоване програмне забезпечення MAVESP8266.
-
Приймач ExpressLRS 2.4G
-
ExpressLRS AUX1-AUX8 не мають повної роздільної здатності. https://www.expresslrs.org/2.0/software/switch-config/
-
Прошивка через WiFi
-
Увімкніть F405-WTE через USB, світлодіодний індикатор приймача (червоний) спочатку блиматиме повільно, а через 30 секунд він має блимати швидко, вказуючи на те, що він у режимі точки доступу WiFi.
-
Більш детальні кроки дивіться на цій сторінці.
-
Ціль: DIY 2,4 ГГц / DIY_2400_RX_ESP8285_SX1280
-
-
Прошивка через UART
-
Підключіть ESP8285(ETx, ERx) до адаптера USB-TTL, при цьому ETx на F405-WTE під’єднайте до Rx на USB-TTL, а ERx – до Tx USB-TTL. Провід 4v5 і GND F405-WTE до 5V і GND USB-TTL.
-
Підключіть адаптер USB-TTL до ПК, натиснувши та утримуючи кнопку завантаження ESP8285.
-
Виберіть ціль DIY 2.4 ГГц / DIY_2400_RX_ESP8285_SX1280 і
UART” для методу прошивки встановіть фразу прив’язки та Параметри мікропрограми і після завершення натисніть Створення та перепрошивка.
-
З'єднання UDP із конфігуратором INAV через WiFi
-
Інструмент: ESP_NodeMCU-PyFlasher.exe
-
Програмне забезпечення: MSPWifiBridge_ESP-01.bin скомпільовано на основі github.com/Scavanger/MSPWifiBridge
-
Прошивка за допомогою ESP_NodeMCU-PyFlasher
-
Підключіть ESP8285(ETx, ERx) до адаптера USB-TTL, при цьому ETx на F405-WTE під’єднайте до Rx на USB-TTL, а ERx – до Tx USB-TTL. Провід 4v5 і GND F405-WTE до 5V і GND USB-TTL
-
Підключіть адаптер USB-TTL до ПК, натиснувши та утримуючи кнопку завантаження ESP8285.
-
відкрити ESP_NodeMCU-PyFlasher
-
виберіть Послідовний порт модуля USB-TTL, завантажте прошивку, виберіть «Подвійний вихід (DOUT)» та «Так. видаляє всі дані“
-
натисніть “Flash NodeMCU“
-
після мигання вимкніть, а потім увімкніть F405-WTE через USB або акумулятор.
-
Зачекайте кілька секунд, знайдіть SSID WiFi “MSPWifiBridge”, а пароль – “123456789”
-
Якщо автоматичного пересилання на сторінку конфігурації немає, перейдіть до http://192.168.4.1 вручну. Стандартні дані для входу: Ім’я користувача:admin, Пароль: 123456789
-
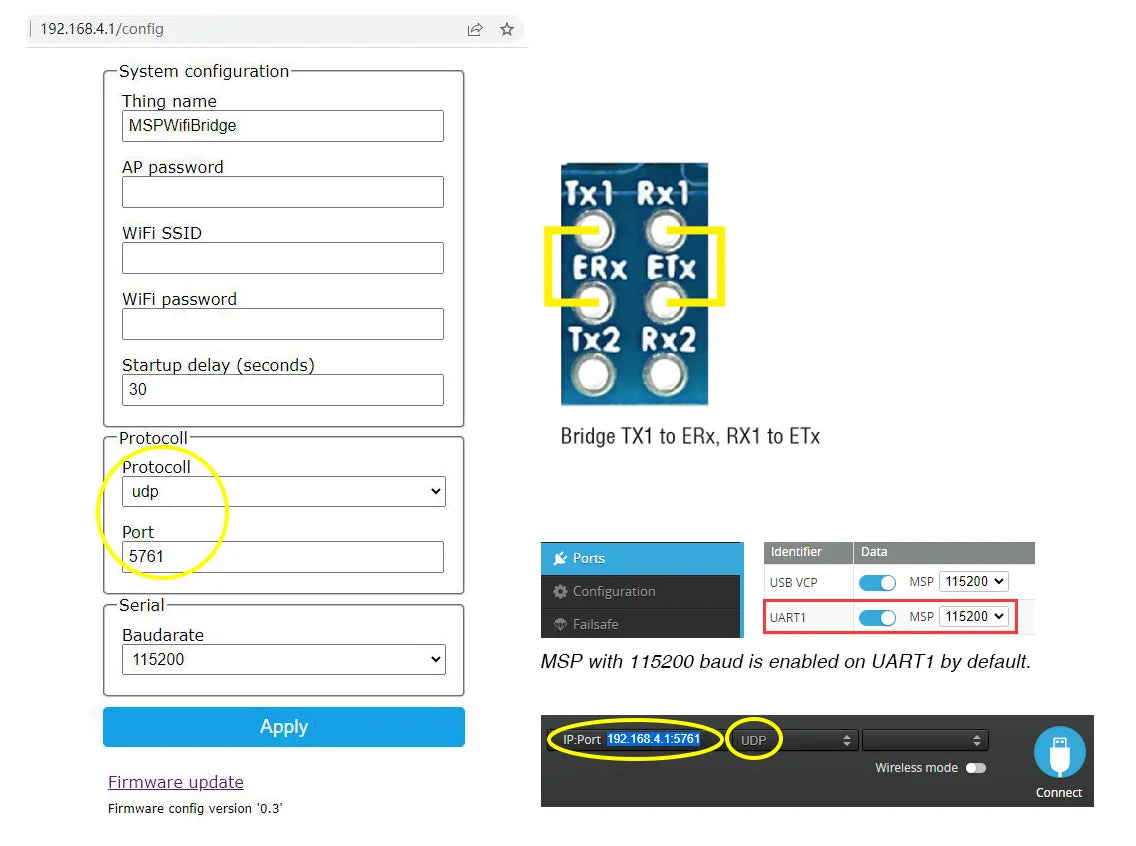
192.168.4.1/config Конфігурація системи Thing_name MSPWifiBridge Пароль точки доступу Ixl Rx| WiFi SSID ERx ETx Пароль WiFi Tx2 Rx2 Затримка Staz (секунд 30 Protocoll Bridge TX1 до erx, RXI до ETx Protocoll udp Порт 5761 Дані ідентифікатора точок USB VC?
Related Collections