


Контролер польоту MATEKSYS H7A3-SLIM - ICM42688P - 30x30
Контролер польоту MATEKSYS H7A3-SLIM - ICM42688P - 30x30
MATEKSYS
Не вдалося завантажити інформацію про можливість самовивозу
Контролер польоту MATEKSYS H7A3-SLIM пропонує високу продуктивність у компактному дизайні 30x30мм. Він оснащений мікроконтролером STM32H7A3RIT6, процесором Cortex-M7 на 280 МГц, 1.4 МБ оперативної пам'яті та 2 МБ флеш-пам'яті. Завдяки IMU ICM42688P, барометру SPL06-001, OSD AT7456E та 128 МБ флеш-блекбоксу, він забезпечує точні дані та достатнє ведення журналу. Контролер включає 6 UART, 11 виходів PWM, 1 I2C, 1 CAN порт та 4 канали ADC. Він також має три світлодіоди статусу, порт USB Type-C та перемикаємий вихід 9В. З монтажним шаблоном 30.5 x 30.5мм, отворами 4мм, гумками 3мм та вагою всього 7г, він ідеально підходить для FPV гонок та фрістайлу. Включено 3D файл кроку для індивідуальної інтеграції.
Особливості
- Дисплей на екрані
- Кріплення 30x30
- Компактний дизайн
- З'єднання
- Легкий
Технічні характеристики
Технічні характеристики
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- Барометр: SPL06-001
- OSD: AT7456E
- Чорна скринька: 128MB Flash (1G-біт NAND)
- 6x Uarts (1,2,3,4, 5, 6) з вбудованою інверсією.
- 11x PWM виходів
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Current, VB2, Cur2)
- 3x світлодіоди для статусу FC (Синій, Червоний) та індикатор 3.3V (Червоний)
- USB Type-C(USB2.0)
- 8x PWM виходів на 2x JST-SH1.0_8pin роз'ємі для 2x 4in1 ESC
- 1x JST-GH1.25_4pin роз'єм (5V/CAN-H/CAN-L/G)
- 9V вихід з можливістю вмикання/вимикання
- Цифрове відео OSD підтримується будь-яким вільним UART
Живлення
- Vbat Вхід: 6~36V (2~8S LiPo)
- BEC: 5V 2A постійно (Макс.3A)
- BEC: 9V 2A постійно (Макс.3A)
- LDO 3.3V: Макс.200mA
- Вбудованого датчика струму немає
- ADC VB2 контакт підтримує Макс. 69V (дільник напруги: 1K:20K)
FC ПЗ
- ArduPilot: MATEKH7A3 (4.6 або новіші)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- Прошивка за допомогою STM32CubeProgrammer
Фізичний
- Монтаж: 30.5 x 30.5мм, Φ4мм з гумками Φ3мм
- Розміри: 36 x 36 x 5 мм
- Вага: 7г
- 3D крок H7A3-SLIM_step.zip
Включаючи
- 1x H7A3-SLIM
- 6x силіконові гумки M4 до M3
- 2x JST-SH1.0_8pin кабель, 5см, & 8pin роз'єми
- 1x JST-GH-4P до JST-GH-4P кабель для CAN порту, 20см
Деталі

Контролер польоту MATEKSYS H7A3-SLIM використовує мікроконтролер STM32H7A3 з IMU ICM42688P та USB-C порт у монтажному шаблоні 30.5мм.

Контролер польоту MATEKSYS H7A3-SLIM має компактну компоновку 30x30 з USB-C портом та чітко позначеними контактами для акуратного підключення.

MATEKSYS H7A3-SLIM використовує подвійні роз'єми JST-SH 1.0 8-pin, а також JST-GH 4-pin порт і USB Type-C для акуратного підключення та легкого налаштування.

MATEKSYS H7A3-SLIM використовує чітко позначені паяльні контакти та порти для відео камери/VTx, UART, CAN та підключень живлення.
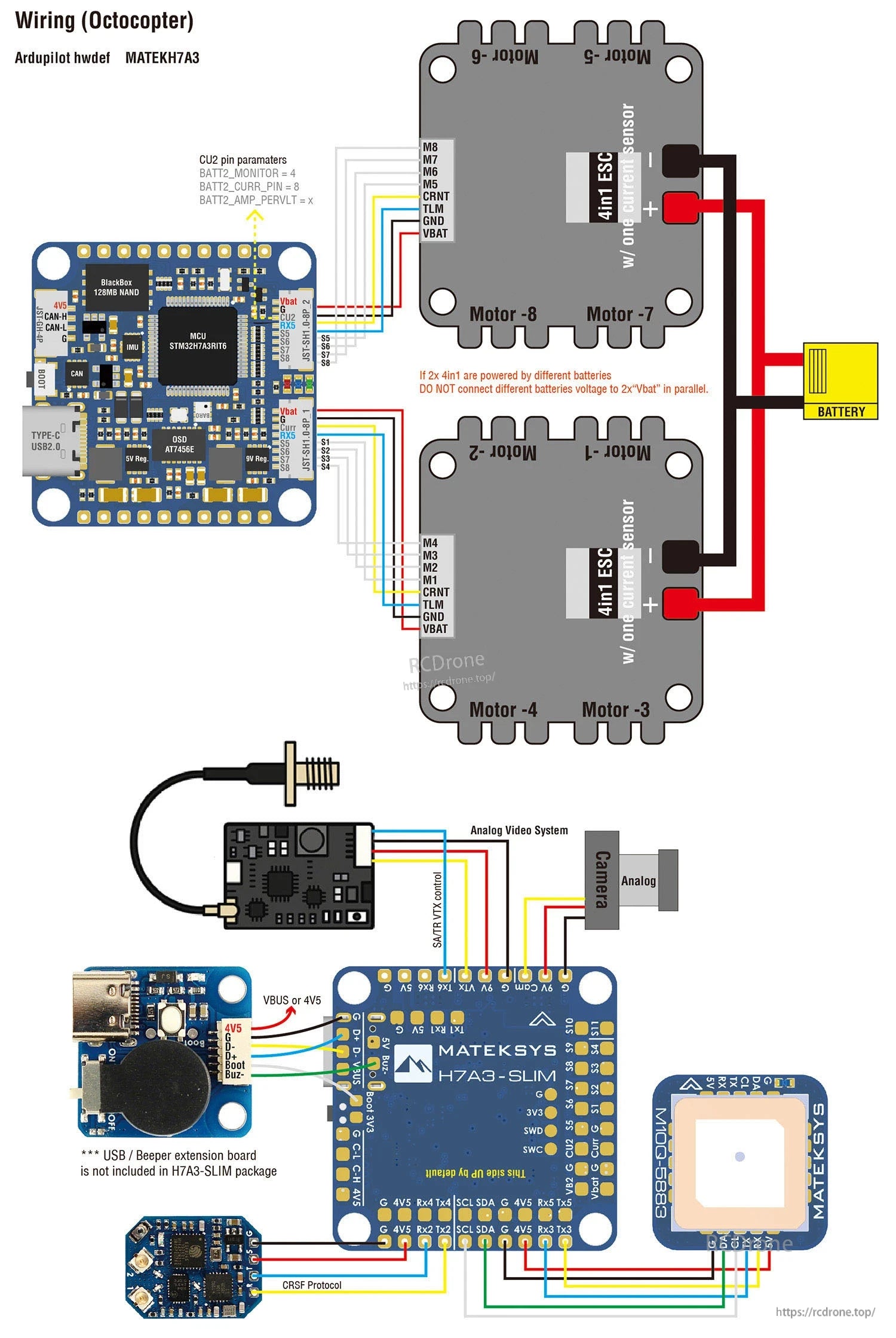
MATEKSYS H7A3-SLIM використовує чітко позначені контакти для підключення подвійних 4-в-1 ESC, живлення VBAT, GPS, приймача та аналогових відеокомпонентів.

Картографування ArduPilot
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | 5 В толерантний I/O | TIM1_CH2 | DMA/Bi-DShot | Група1 |
| S2 | PWM2 GPIO51 | 5 В толерантний I/O | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | 5 В толерантний I/O | TIM2_CH1 | DMA/Bi-DShot | Група2 | |
| S4 | PWM4 GPIO53 | 5 В толерантний I/O | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | 5 В толерантний I/O | TIM3_CH3 | DMA/Bi-DShot | Група3 | |
| S6 | PWM6 GPIO55 | 5 В толерантний I/O | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | 5 В толерантний I/O | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | 5 В толерантний I/O | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | 5 В толерантний I/O | TIM4_CH1 | DMA/DShot | Група4 | |
| S10 | PWM10 GPIO59 | 5 В толерантний I/O | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V стійкий I/O | TIM16_CH1 | DMA/DShot | Group5 | |
| PWM1~PWM11 підтримують Dshot та PWM.Однак змішування Dshot та звичайної роботи PWM для виходів обмежено групами, тобто увімкнення Dshot для виходу в групі вимагає, щоб УСІ виходи в цій групі були налаштовані та використовувалися як Dshot, а не як виходи PWM. Якщо серво та мотор змішані в одній групі, переконайтеся, що ця група працює на найнижчій частоті PWM відповідно до специфікації серво. Іншими словами, якщо серво підтримує макс. 50 Гц, ESC повинен працювати на 50 Гц у цій групі. |
||||||
| PINIO | 9V перемикач | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Vbat контакт | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Curr контакт | BATT_CURRENT_SENS | 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 X |
||
| VB2 Pad | BATT2_VOLTAGE_SENS | 0~69V | BATT2_VOLT_PIN BATT2_VOLT_MULT |
18 21.0 |
||
| CU2 Pad | BATT2_CURRENT_SENS | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | 5V стійкий I/O | на платі Baro SPL06-001 | Адреса | 0x76 |
| Цифровий швидкість повітря I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Магнітометр | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | 5V стійкий I/O | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
Чи є GPS Чи є компас Чи є датчик швидкості |
ТИП_GPS Маска_ТИПУ_КОМПАСУ ТИП_ШВИДКОСТІ |
9 0 8 |
| UART | USB | USB | консоль | ПРОТОКОЛ_SERIAL0 | 2 | |
| TX1 RX1 | USART1 з DMA | 5 В стійкий I/O | Телеметрія | ПРОТОКОЛ_SERIAL1 | 2 | |
| TX2 RX2 | USART2 з DMA | 5 В стійкий I/O | RC вхід/Приймач | ПРОТОКОЛ_SERIAL2 | 23 | |
| TX3 RX3 | USART3 з DMA | 5 В стійкий I/O | GPS | СЕРІЙНИЙ3_ПРОТОКОЛ | 5 | |
| TX4 RX4 | UART4 без DMA | 5 В толерантний I/O | Запасний | СЕРІЙНИЙ4_ПРОТОКОЛ | -1 | |
| TX5 RX5 | UART5 без DMA | 5 В толерантний I/O | Запасний | СЕРІЙНИЙ5_ПРОТОКОЛ | -1 | |
| TX6 RX6 | USART6 без DMA | 5 В толерантний I/O | Запасний | СЕРІЙНИЙ6_ПРОТОКОЛ | -1 | |
RC ВХІД
RC вхід налаштований на USART2(СЕРІЙНИЙ2). Він підтримує всі серійні RC протоколи. SERIAL2_PROTOCOL=23 за замовчуванням.
- PPM не підтримується.
- CRSF вимагає підключення Tx2 & Rx2, і встановіть SERIAL2_OPTIONS на “0” (за замовчуванням).
- SBUS/DSM/SRXL підключається до контакту Rx2, але SBUS вимагає, щоб SERIAL2_OPTIONS було встановлено на “3”.
- FPort вимагає підключення до Tx2, і встановіть SERIAL2_OPTIONS на “7”. Якщо телеметрія не працює, спробуйте встановити SERIAL7_OPTIONS = 135.
- SRXL2 вимагає підключення до Tx2 і автоматично надає телеметрію. Встановіть SERIAL2_OPTIONS на “4”.
- Будь-який UART також може бути використаний для підключення RC систем в ArduPilot, і сумісний з усіма протоколами, крім PPM. Дивіться Системи радіоуправління для деталей.
Реле ArduPilot (PINIO)
- 9V вихід УВІМКНЕНИЙ за замовчуванням
- PC13 PINIO1 ВИХІД GPIO(81) //9V живлення switche.g.
- ФУНКЦІЯ РЕЛЕ1 1
- PIN РЕЛЕ1 81 // PINIO1 GPIO
- RC7_ОПЦІЯ 28 //Реле Увімкнено/Вимкнено, Використовуйте CH7 передавача для налаштування 9V УВІМКНЕННЯ/ВИМКНЕННЯ
Налаштована функція буде активована, коли значення pwm допоміжного вимикача перевищить 1800. Вона буде деактивована, коли значення впаде нижче 1200.
Перевірте значення pwm, яке надсилається з передавача, коли вимикач високий і низький, використовуючи початкове налаштування Mission Planner >> Обов'язкове обладнання >> Екран калібрування радіо.Якщо він не піднімається вище 1800 або нижче 1200, найкраще відрегулювати кінцеві точки сервоприводу в передавачі.
Related Collections


