Модуль GPS MATEKSYS M9N-5883 GNSS і компас, u-blox NEO-M9N + QMC5883L, JST-GH-6P
Модуль GPS MATEKSYS M9N-5883 GNSS і компас, u-blox NEO-M9N + QMC5883L, JST-GH-6P
MATEKSYS
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
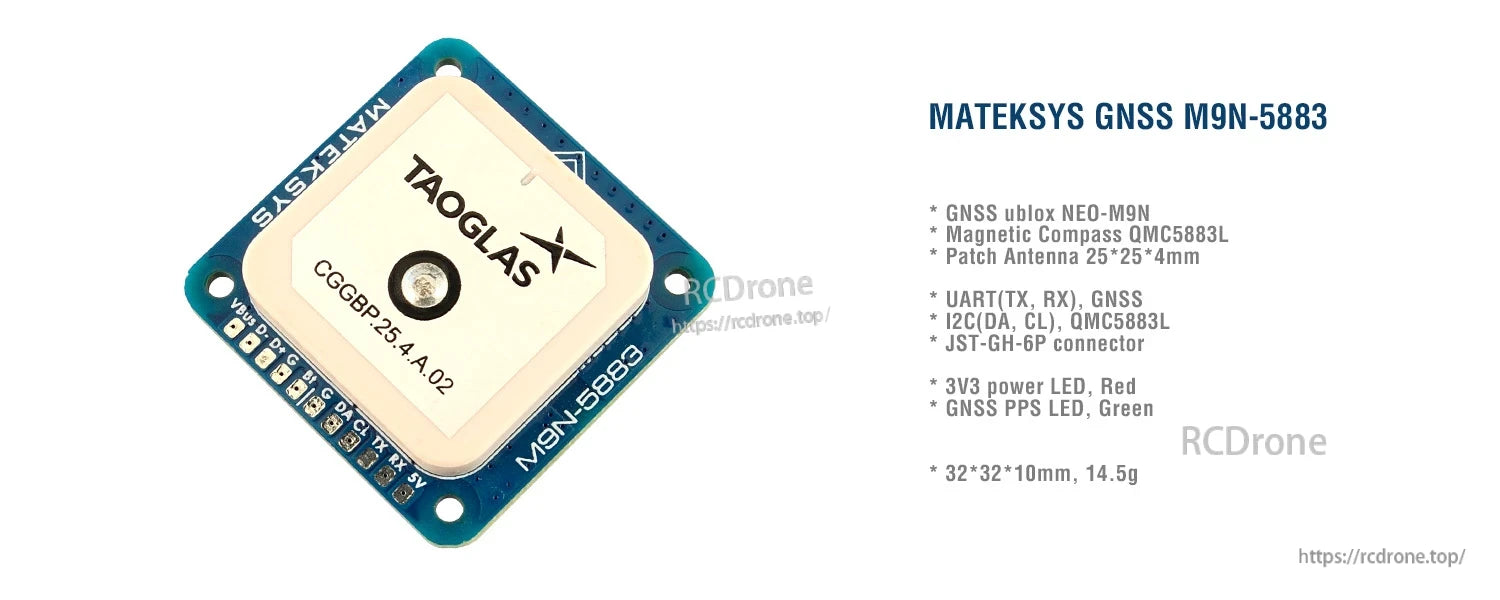
Модуль GPS компаса MATEKSYS M9N-5883 GNSS & є багатоконтелляційним GNSS приймачем на базі u-blox NEO-M9N, поєднаним з магнітним компасом QMC5883L. Завдяки архітектурі багатосмугового RF фронт-енду, він може одночасно приймати GPS, Galileo, GLONASS та BeiDou.
Ключові особливості
- GNSS: одночасний приймач u-blox NEO-M9N (GPS, GLONASS, Galileo, BeiDou)
- Магнітний компас: QMC5883L
- Інтерфейси: UART (TX, RX) для GNSS; I2C (DA, CL) для компаса
- Роз'єм JST-GH-6P
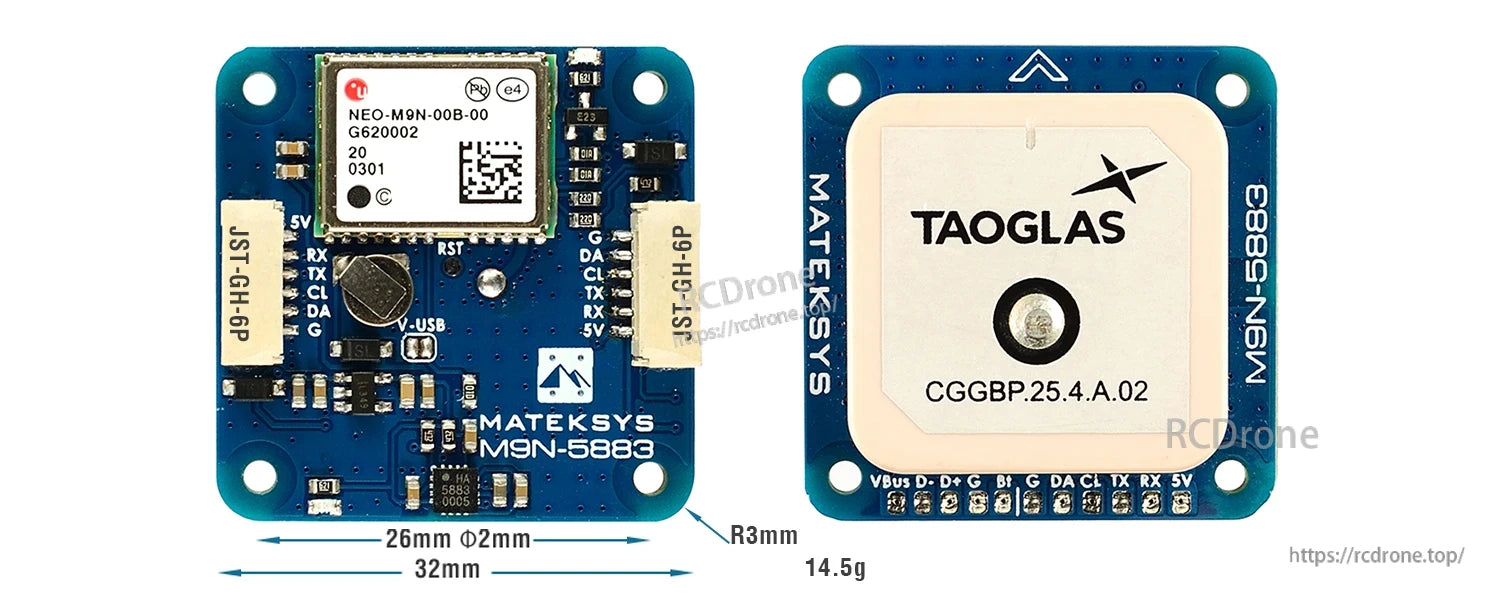
- Світлодіоди статусу: світлодіод живлення 3.3V (червоний); світлодіод GNSS PPS (зелений), що блимає (1Гц), коли GNSS має 3D фіксацію
- Скидання приймача: з'єднання контакту “RST” з землею на принаймні 100 мс викликає холодний старт (опція відновлення)
Обслуговування клієнтів: [email protected] (або https://rcdrone.top/).
Специфікації
| GNSS приймач | u-blox NEO-M9N |
| Підтримувані сузір'я | GPS, GLONASS, Galileo, BeiDou |
| Магнітний компас | QMC5883L |
| Патч антена | 25*25*4мм |
| Діапазон вхідної напруги | 4~5.5V (5V pad/pin) |
| Споживана потужність | 50mA |
| Швидкість передачі UART | 38400 за замовчуванням |
| Температури експлуатації | -20~80 °C |
| Інтерфейс GNSS | UART (TX, RX) |
| Інтерфейс компаса | I2C (DA, CL) |
| З'єднувач | JST-GH-6P |
| Індикатори LED | 3.3V Power LED (червоний); GNSS PPS LED (зелений), миготіння (1Гц) коли GNSS має 3D фіксацію |
| Розміри | 32mm*32mm*10mm |
| Вага | 14.5g |
| Деталі монтажу (як показано) | 26мм; діаметр отвору: Φ2мм; R3мм |
Що включено
- 1x M9N-5883
- 1x JST-GH-6P до JST-GH-6P 20см силіконовий провід
Проводка та налаштування
- M9N-5883 5V до контролера польоту 4~5.5V
- M9N-5883 RX до контролера польоту UART_TX
- M9N-5883 TX до контролера польоту UART_RX
- M9N-5883 CL до контролера польоту I2C_SCL
- M9N-5883 DA до контролера польоту I2C_SDA
- M9N-5883 G до контролера польоту GND
Поради та примітки
-
Вирівнювання компаса (плоский монтаж): Сильно не рекомендується нахиляти магнітометр!
- INAV/Betaflight: стрілка компаса вперед, встановіть CW 270° переворот, коли стрілка контролера польоту спрямована вперед.
- INAV/Betaflight: стрілка компаса назад, встановіть CW 90° переворот, коли стрілка контролера польоту спрямована вперед.
- ArduPilot/Mission Planner: обертання немає.
- Тримайте компас/магнітометр на відстані 10 см від ліній електропередач/ESC/двигунів/матеріалів на основі заліза.
- Вимагається INAV 5.0.0, Betaflight 4.3.0, ArduPilot 4.3 або новіша версія.
- NEO-M9N, MAX-M10S, SAM-M10Q серії не мають вбудованої пам'яті даних; після вимкнення GNSS і розрядки суперконденсатора налаштування повертаються до значень за замовчуванням.
- Протокол UBX є двостороннім; прошивка контролера польоту може змінювати налаштування на GPS через протокол UBX (немає необхідності налаштовувати параметри модуля GNSS в u-center).
- З GNSS FW3.01: імпульс часу синхронізований з UTC; час дійсний лише після завантаження стрибка секунди (може зайняти до 12,5 хвилин). LED PPS може не блимати відразу після 3D фіксації.
- Скидання: з'єднання контакту “RST” з землею протягом щонайменше 100 мс викликає холодний старт. RESET видаляє всю інформацію та викликає холодний старт; використовуйте лише як варіант відновлення, якщо проводка/налаштування правильні, але контролер не може виявити модуль GNSS.
- Подряпини на керамічній антені є результатом налаштування антени.
Посібники
- M9N-5883_step.zip
- Виправлення проблем, пов'язаних з GPS: https://www.mateksys.com/?p=5712#tab-id-6
- u-center Windows
Деталі
MATEKSYS GNSS M9N-5883 поєднує приймач u-blox NEO-M9N та компас QMC5883L з підключеннями UART та I2C через 6-контактний порт JST-GH.
MATEKSYS M9N-5883 поєднує приймач GNSS u-blox NEO-M9N та компас 5883 на платі 32 мм з патч-антеною TAOGLAS та 6-контактними роз'ємами JST-GH.
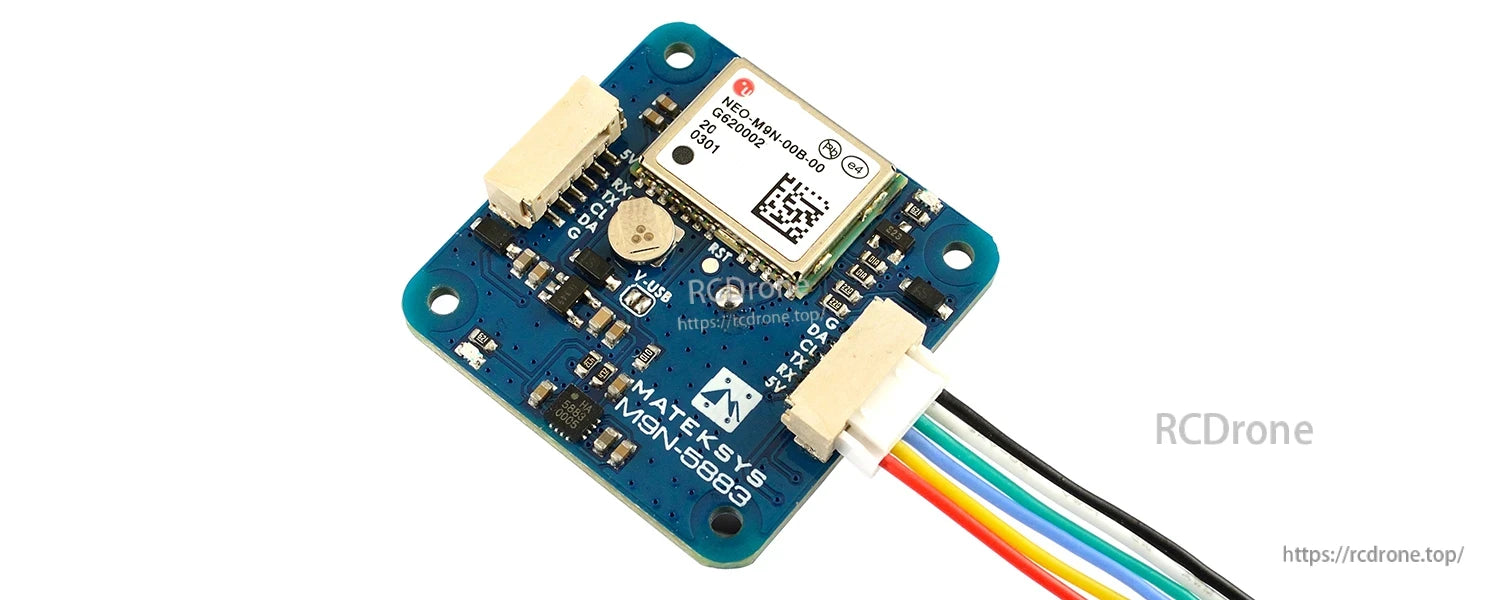
Модуль GNSS та компасу MATEKSYS M9N-5883 використовує компактну плату з роз'ємами JST для простого підключення GPS та I2C.
Related Collections