




BetaFPV Matrix 1S Безколекторний контролер польоту AIO 3IN1/4IN1, STM32G473, ELRS 2.4G, 12A/18A
BetaFPV Matrix 1S Безколекторний контролер польоту AIO 3IN1/4IN1, STM32G473, ELRS 2.4G, 12A/18A
BETAFPV
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Контролер польоту BetaFPV Matrix 1S безщітковий є платформою контролера польоту 1S whoop, що пропонується в двох версіях: Matrix 1S 3IN1 (FC + ESC + вбудований серійний ELRS 2.4GHz RX; без аналогового OSD) та Matrix 1S 4IN1 (додає Betaflight OSD та паяльні площадки для зовнішнього аналогового VTX). Він використовує мікроконтролер STM32G473CEU6 та має крос-стиль розташування плати, і розроблений для простого встановлення на 1S мікробудів.
Ключові особливості
- Дві архітектури: 3IN1 для HD цифрових будівель (з портом HD цифрового VTX SH1.0-6Pin та роз'ємами для моторів) та 4IN1 для аналогових будівель (з OSD та зовнішніми паяльними площадками для аналогового VTX).
- MCU: STM32G473CEU6 (168MHz); заявлено, що обробка на 55% швидша, ніж у F411.
- Вихід ESC: 12A безперервно, 18A піковий; підтримує DSHOT300 та DSHOT600.
- Новий BEC: 5V/3A; незалежний від IMU дизайн LDO живлення 3.3V.
- Вбудований серійний ELRS 2.4GHz приймач (V3.4.3), протокол CRSF.
- Примітка щодо міцності: плита 1 мм; безпаяна орієнтована установка на версії 3IN1.
Технічні характеристики
Контролер польоту (FC)
| MCU | STM32G473CEU6 (168MHz) |
| Гіроскоп | ICM42688P |
| Максимальна частота дискретизації гіроскопа (таблиця порівняння) | ICM42688P, 8KHz |
| Пам'ять Blackbox | 16MB (також показується як 16M) |
| Датчик | Напруга & струм |
| BEC | 5V/3A |
| Незалежне живлення IMU | 3.3V LDO (незалежний LDO для IMU) |
| ESC (на борту) | 12A безперервно |
| RX | Серійний ELRS 2.4GHz (V3.4.3) |
| USB порт | SH1.0-4Pin |
| З'єднувач батареї | BT2.0 |
| З'єднувач мотора | JST1.25-3Pin (також показано як JST1.25) |
| Розмір монтажу | 25.5мм x 25.5мм |
Специфічний I/O для версії
| UART (3IN1) | UART 1 (тільки RX/SBUS), UART 2 (вільний), UART 3 (для RX), UART 4 (вільний/HD MSP) |
| UART (4IN1) | UART 1 (для VTX), UART 2 (вільний), UART 3 (для RX), UART 4 (НІ) |
| OSD | AT7456E (тільки версія 4IN1) |
| HD цифровий порт VTX | SH1.0-6Pin (тільки версія 3IN1) |
Вага
| 3IN1 | 3.8±0.1г (з'єднувач батареї не враховано); 4.2±0.1г (з'єднувач батареї враховано) |
| 4IN1 | 3.6±0.1г (з'єднувач батареї не враховано); 4.6±0.1г (включено з'єднання акумулятора) |
ESC
| Вхід живлення | Тільки 1S |
| Струм | 12A безперервно, 18A піковий |
| Цифровий сигнал протокол | DSHOT300, DSHOT600 |
| Прошивка ESC | A_X_5_96_v0.19.2.hex для прошивки BB51 Bluejay |
Таблиця порівняння (як надано)
| Matrix 1S 3IN1 | Matrix 1S 4IN1 | F4 1S 5A AIO | |
| MCU | STM32G473CEU6 | STM32F411CEU6 | |
| Частота MCU | 168МГц | 108МГц | |
| Гіроскоп, макс. частота вибірки | ICM42688P, 8КГц | BMI270, 3.2KГц | |
| ESC | 12A безперервно | 1S, 5A | |
| Пам'ять Blackbox | 16M | 8M | |
| OSD | - | Betaflight OSD: AT7456E | |
| RX | Вбудований серійний ELRS 2.4GHz | ||
| Роз'єм мотора | JST1.25 | ||
| Вага | 3.8g | 3.6g | 3.64g |
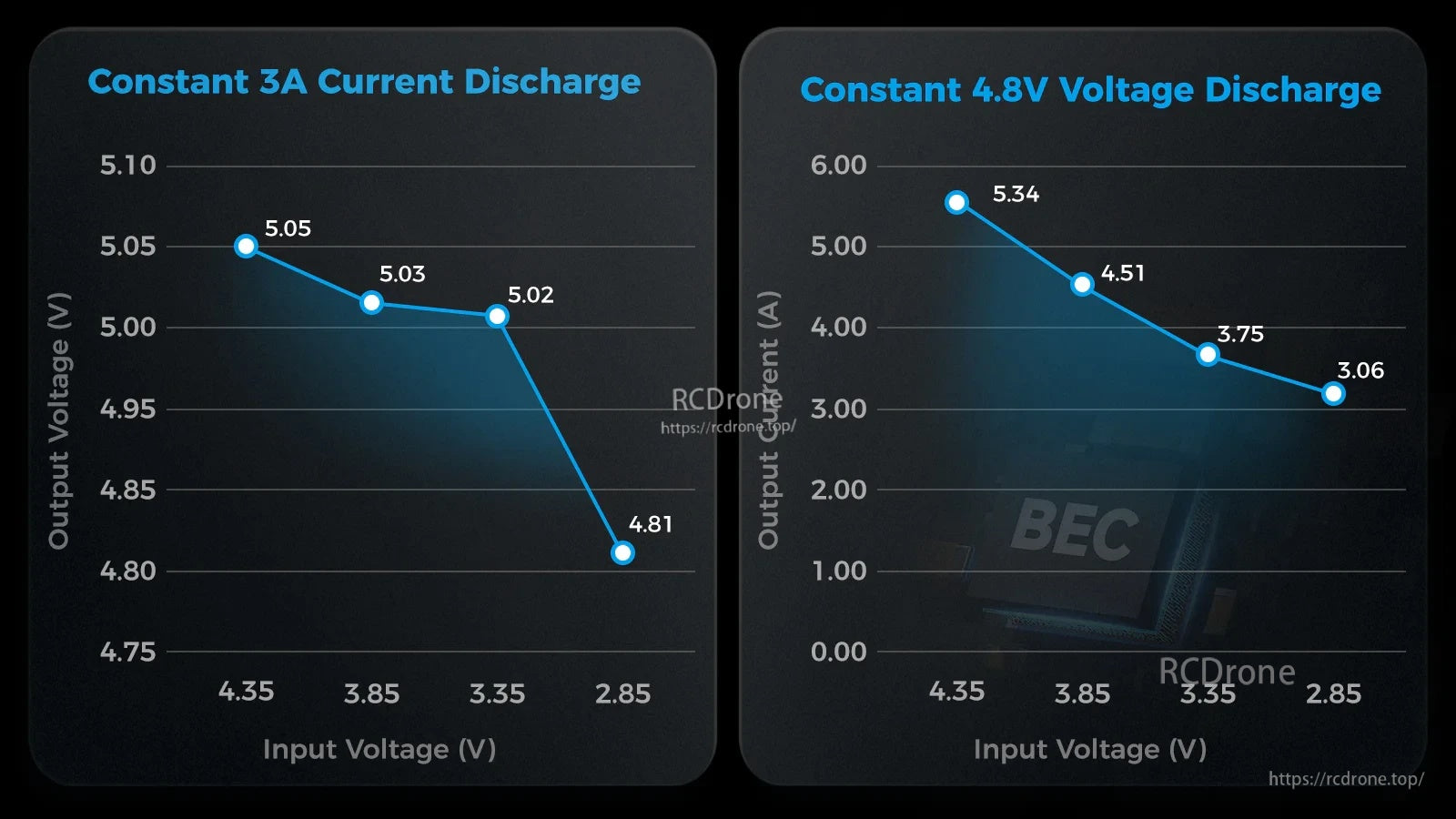
Дані тестування BEC (як показано)
- Постійний розряд струму 3A: Вхід 4.35V → Вихід 5.05V; 3.85V → 5.03V; 3.35V → 5.02V; 2.85V → 4.81V
- Постійний розряд напруги 4.8V: Вхід 4.35V → Вихід 5.34A; 3.85V → 4.51A; 3.35V → 3.75A; 2.85V → 3.06A
Порти & Примітки до налаштування (з діаграм)
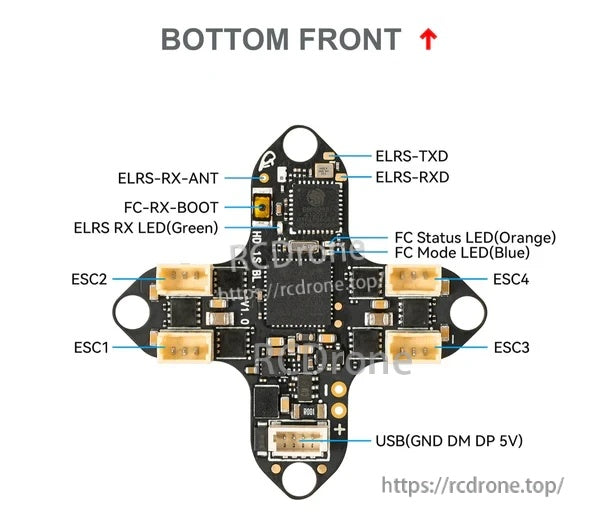
- Схема USB: USB (GND, DM, DP, 5V).
- 3IN1 мітки на платі включають: RX3, RX2, TX2, TX3; BATT-, BATT+(1S), 5V, GND; SBUS (RX1), RX4, TX4; LED; ELRS-RX-ANT; ELRS-TXD, ELRS-RXD; FC-RX-BOOT; ELRS RX LED (зелений); FC Status LED (помаранчевий); FC Mode LED (синій); ESC1/ESC2/ESC3/ESC4.
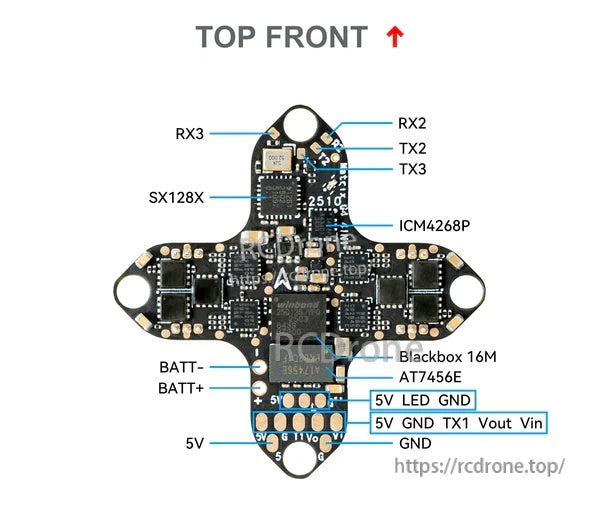
- 4IN1 мітки на платі включають: SX128X; ICM42688P; Blackbox 16M; AT7456E; ELRS-RX-ANT; ELRS-TXD, ELRS-RXD; ESP8285; STM32G473; FC-RX-BOOT; FC Status LED; FC-Mode LED; ESC1/ESC2/ESC3/ESC4; плюс мітки на платах, включаючи 5V/LED/GND та 5V/GND/TX1/Vout/Vin.
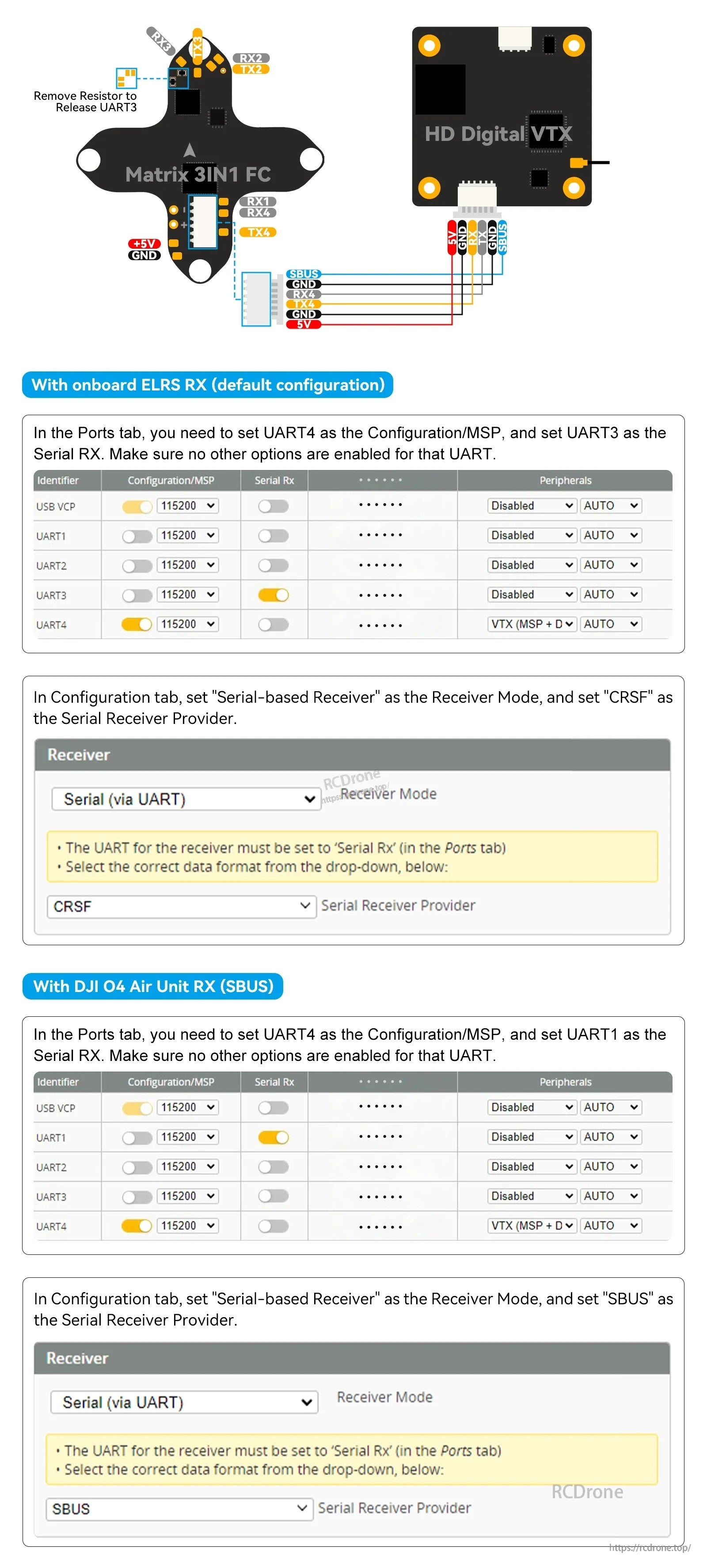
Конфігурація портів Betaflight показана (3IN1)
- З вбудованим ELRS RX (за замовчуванням): встановіть UART4 на Configuration/MSP та UART3 на Serial RX (інші опції для UART3 не активовані). Режим приймача: Приймач на основі серійного з'єднання; Постачальник серійного приймача: CRSF.
- З RX DJI O4 Air Unit (SBUS): встановіть UART4 на Configuration/MSP та UART1 на Serial RX (інші опції для UART1 не активовані). Режим приймача: Приймач на основі серійного з'єднання; Постачальник серійного приймача: SBUS.
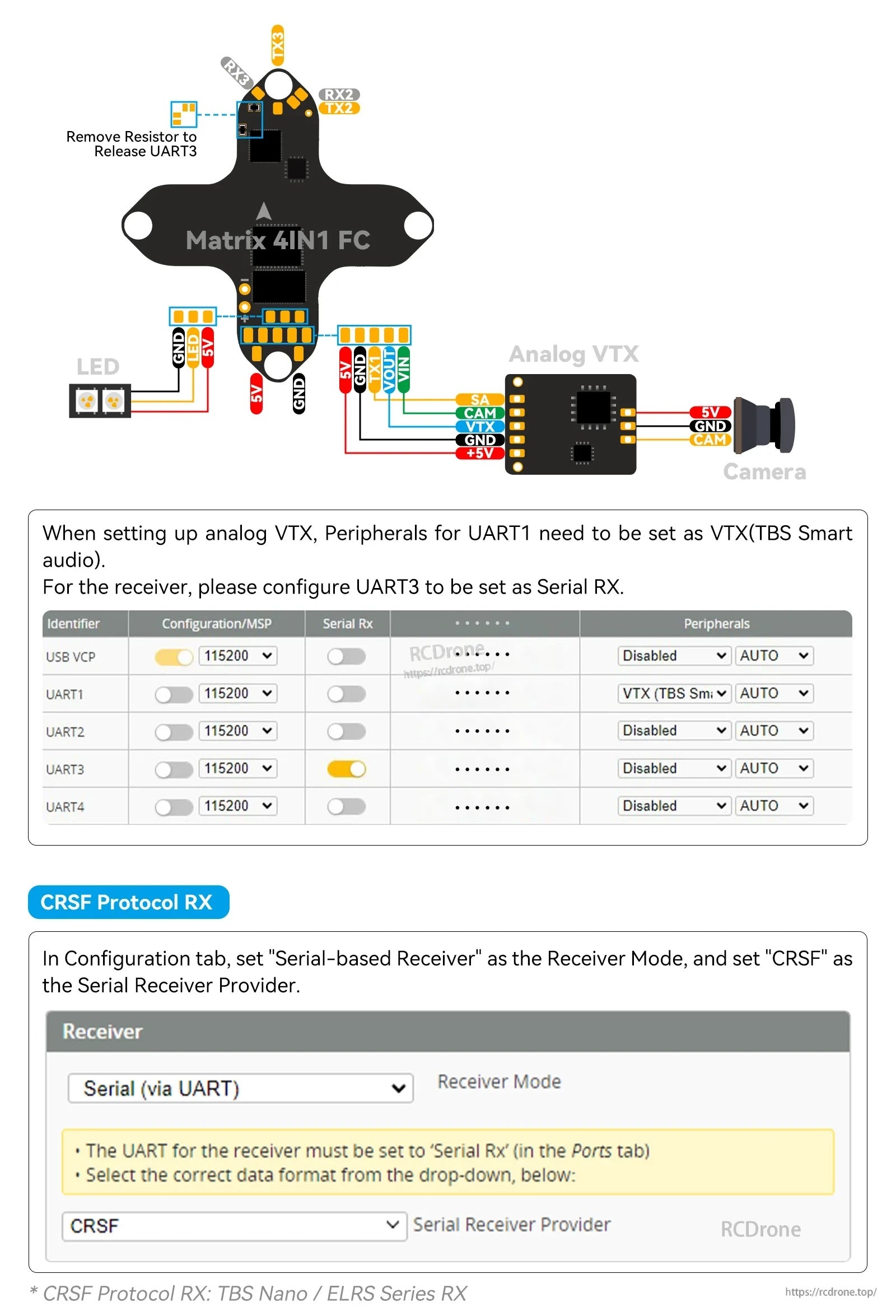
Конфігурація портів Betaflight показана (4IN1)
- При налаштуванні аналогового VTX: налаштуйте периферійні пристрої для UART1 на VTX (TBS Smart audio).
- Для приймача: налаштуйте UART3 як серійний RX.
- Примітка щодо протоколу CRSF RX: TBS Nano / ELRS Series RX.
Прошивка
- Прошивка FC (3IN1): Betaflight_4.5.1_BETAFPVG473
- Прошивка FC (4IN1): Betaflight_4.5.2_BETAFPVG473_V2
- Базова прошивка ESC (BB51 Bluejay): A_X_5_96_v0.19.2.hex (підтримує DSHOT300/DSHOT600; згадує про фіксовані частоти PWM 24KHz/48KHz/96KHz та індивідуальні мелодії запуску)
Важливо: Починаючи з 5 січня 2026 року, 3IN1 FC буде постачатися з гіроскопом BMI270. Перевірте версію гіроскопа перед прошивкою. Matrix 1S 3IN1 та 4IN1 вимагають різної прошивки.
Примітка: Уникайте прошивки ПЗ ESC з коротшим інтервалом; зазначено, що це може збільшити ймовірність зависання та пошкодження контролера польоту.
Посібники & Завантаження
- 3IN1 прошивка + CLI дамп: https://support.betafpv.com/hc/en-us/articles/41037090524697-Firmware-for-Matrix-1S-Brushless-Flight-Controller-3IN1-HD
- 4IN1 прошивка + CLI дамп: https://support.betafpv.com/hc/en-us/articles/48215862783769-Firmware-for-Matrix-1S-Brushless-Flight-Controller-4IN1
- Примітки до випуску Betaflight 4.5.1: https://github.com/betaflight/betaflight/releases/tag/4.5.1
- Примітки до випуску Betaflight 4.5.2: https://github.com/betaflight/betaflight/releases/tag/4.5.2
- Проект Bluejay: https://github.com/bird-sanctuary/bluejay
- Випуски Bluejay: https://github.com/bird-sanctuary/bluejay/releases
- Конфігуратор ESC: https://preview.esc-configurator.com/
- BLHeliSuite16714903: https://github.com/4712/BLHeliSuite/releases/tag/16714903
- Посібник з прошивки ПЗ ELRS: https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
Що входить
Пакет контролера польоту Matrix 1S безщіткового (3IN1)
- 1 * Контролер польоту Matrix 1S безщітковий (3IN1)
- 1 * Адаптер Type-C на SH1.0
- 1 * Кабель адаптера SH1.0-4Pin
- 1 * Кабель адаптера SH1.0-6Pin
- 4 * M1.2*4 Саморізи
- 4 * M1.4*5 Саморізи
- 4 * Амортизуючі кулі
Контролер польоту Matrix 1S безщітковий (4IN1) пакет
- 1 * Контролер польоту Matrix 1S безщітковий (4IN1)
- 1 * Адаптер Type-C до SH1.0
- 1 * Кабель адаптера SH1.0-4Pin
- 4 * M1.2*4 Саморізи
- 4 * M1.4*5 Саморізи
- 4 * Амортизуючі кулі
Увага
- Створений для новачків та рекреаційних пілотів, контролер Matrix FC використовує плату товщиною 1 мм для міцності та розроблений для легкого встановлення.
- Контролери польоту покриваються від виробничих дефектів. Проблеми, що виникають через помилки користувача, фізичні пошкодження при аваріях, пошкодження під час встановлення або демонтажу, модифікації, стрибки напруги, електричні пожежі або вплив води, не покриваються.
Для питань сумісності (вибір 3IN1 або 4IN1, підключення або прошивка) звертайтеся до служби підтримки за адресою https://rcdrone.top/ або [email protected].
Деталі

Виберіть між платою 3IN1 для HD цифрових збірок та варіантом 4IN1, який додає підтримку Betaflight OSD та аналогового VTX.


Оновлений BEC 5V/3A характеризується стабільним виходом при типовій напрузі входу 1S.

З'єднувачі без пайки спрощують установку, з окремим портом HD цифрового VTX та підключеними мотор проводами.

Для аналогових збірок версія 4IN1 надає з'єднувальні площадки для підключення зовнішнього аналогового VTX.

Примітки з налаштування охоплюють загальну картографію портів Betaflight для HD цифрових збірок та вбудованого приймача Serial ELRS.
Інструкції з конфігурації зосереджені на підключенні аналогового VTX та налаштуваннях CRSF для вбудованого приймача Serial ELRS.

Включені аксесуари підтримують швидку установку та монтаж на верстаті, з USB-адаптером, кабелем та кріпленням.

Related Collections





