

Безщітковий серводвигун MUWEIDU L4030, 16В, 160 об/хв, 0.25Н·м, RS485/CAN, енкодер 15/18-біт
Безщітковий серводвигун MUWEIDU L4030, 16В, 160 об/хв, 0.25Н·м, RS485/CAN, енкодер 15/18-біт
MUWEIDU
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
MUWEIDU L4030 Двигун - це низькошвидкісний, високоточний безщітковий постійного струму серводвигун з інтегрованими електричними приводами для контролю швидкості/позиції. Він підтримує RS485 або CAN зв'язок і розроблений для компактних, обмежених у просторі рухомих застосувань, що вимагають стабільної, плавної роботи.
Ключові особливості
- Серійна позиція: “Серія низькошвидкісних & високо точних безщіткових DC двигунів”
- Міні-сервомотори; конструкція з порожнім валом
- Стабільна & плавна робота
- Сертифіковано CE
- Інтегрована висока точність
- Легка конструкція; висока продуктивність крутного моменту
- Відповідає вимогам низькошвидкісного та високо точного позиційного контролю
- Високопродуктивний 32-бітний мікроконтролер забезпечує повну сумісність серії MS з усіма командами управління серії MF
- Преміум силіконові сталеві листи та високотемпературні стійкі високопродуктивні постійні магніти використовуються як основні матеріали двигуна
- Зовнішній ротор з багатоступеневим сплюснутим дизайном забезпечує вищий крутний момент для обмежених за простором застосувань
- Безщіткова структура з високопродуктивними підшипниками для більш плавного обертання та тривалішого терміну служби
- Високоточні, з низьким дрейфом температури сплавні резистори для точного зразка струму та контролю
- Повний N-канальний трифазний міст з низьким внутрішнім опором та високим вихідним струмом
- Підтримує безшовне перемикання між режимами контролю моменту вільного ходу, швидкості та позиції
- Одноразова калібровка; "нульова позиція ніколи не втрачається"
Технічні характеристики
| Модель | L4030 |
| Номінальна напруга | 16V |
| Номінальний струм | 1.1A |
| Пікова потужність | 5.5W |
| Номінальний крутний момент | 0.25N.m |
| Піковий крутний момент | 0.35N.m |
| Номінальна швидкість | 160об/хв |
| Енкодер | 15біт або 18біт |
| Інерція ротора | 105гсм^2 |
| Моніторинг температури двигуна | ТАК |
| Режими управління | Швидкість/Позиція |
| Протокол зв'язку | RS485 або CAN |
| Загальні розміри | Phi39.6мм x 33мм |
| Вага | 112г |
Визначення інтерфейсу
- ID ВИМИКАТИ
- CAN/RS485
| Інтерфейс | Примітка |
|---|---|
| B/L | RS485-B або CAN-L |
| A/H | RS485-A або CAN-H |
| V- | Негативне живлення |
| V- | Негативне живлення |
| V+ | Позитивне живлення |
| V+ | Позитивне живлення |
| T | UART Передавач |
| R | UART Приймач |
| G | Сигнальний GND |
Сценарії застосування
- Гуманоїдні роботи
- Роботизовані руки
- Екзоскелети
- Чотириногі роботи
- AGV транспортні засоби
- ARU роботи
- Камера на 360 градусів
- Портативна камера
- LiDAR
- Стабілізатор (Gimbal)
Програмне забезпечення для ПК / Функції управління (як зазначено)
- Доступне налаштування параметрів / тестування / оновлення прошивки на базі ПК
- Сумісний з платформами відкритого коду, включаючи ПК, MCU, PLC, промисловий комп'ютер та Raspberry Pi
- Кілька режимів управління: Режим крутного моменту; Режим швидкості; Режим багатократного обертання; Режим одноразового обертання + напрямок; Режим інкрементальної позиції
- З опціями обмеження швидкості для: Режим багатократного обертання; Режим одноразового обертання + напрямок; Режим інкрементальної позиції
- Багатошарові механізми захисту
- Функція гальмування зарезервована (Гальмо / Випуск гальма)
Документи
Для технічної підтримки, питань інтеграції або допомоги з документацією, звертайтеся до [email protected] or відвідайте https://rcdrone.top/.
Деталі

Компактна платформа міні-сервомотора, розроблена для низькошвидкісного, високоточного руху в обмежених просторах.

Інтегровані електронні компоненти приводу підтримують стабільний низькошвидкісний, високоточний контроль позиції з ефективними матеріалами та дизайном мотора.
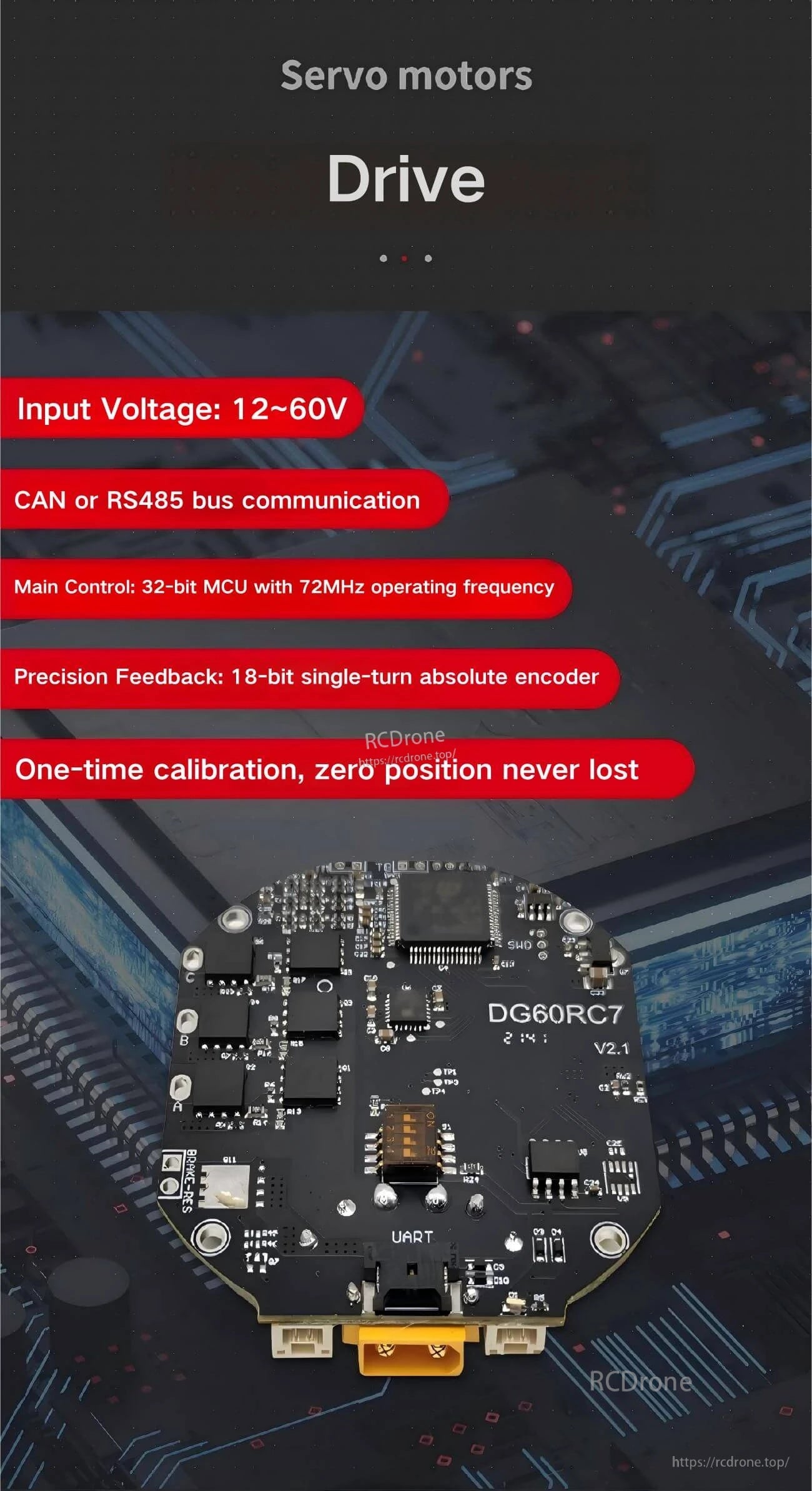
Виберіть зв'язок CAN або RS485 та зворотний зв'язок абсолютного енкодера для чутливого контролю швидкості та позиції.

Чітке маркування інтерфейсу спрощує підключення для живлення, ліній CAN/RS485 та з'єднань сигналів UART.
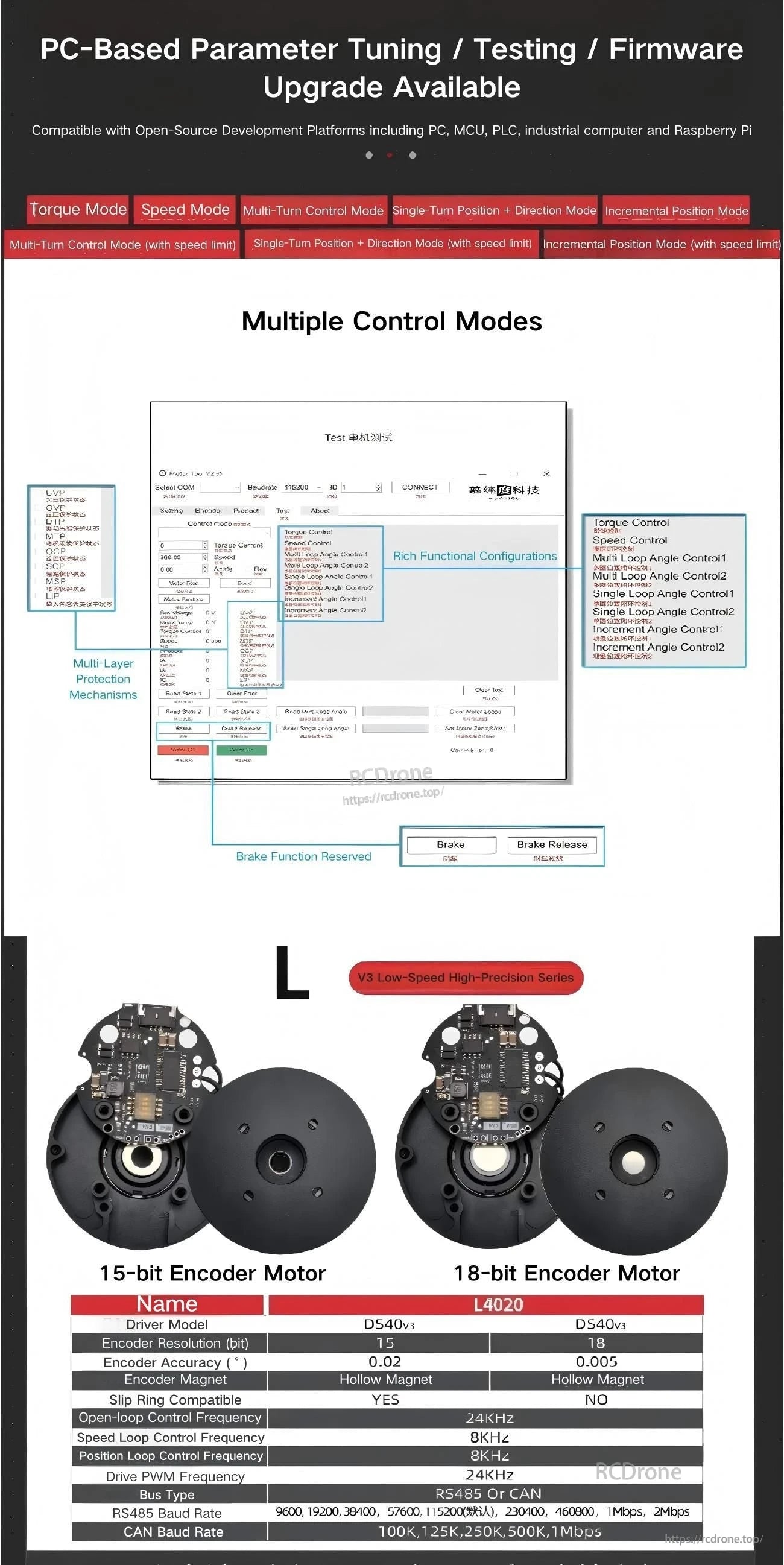
Інструменти для ПК дозволяють налаштування параметрів, тестування та оновлення прошивки в різних режимах управління та конфігураціях енкодера.

Related Collections

