







MyActuator RH-17 Порожнистий гармонічний мотор для роботизованих з'єднань – піковий момент 54 Н·м, передавальне число 100:1, EtherCAT і CAN BUS, подвійний енкодер ABS-17BIT
MyActuator RH-17 Порожнистий гармонічний мотор для роботизованих з'єднань – піковий момент 54 Н·м, передавальне число 100:1, EtherCAT і CAN BUS, подвійний енкодер ABS-17BIT
MyActuator
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Мотор MyActuator RH-17 Hollow Harmonic Robot Joint Motor є високопродуктивним актуатором, розробленим для передових робототехнічних застосувань. З передатним відношенням 100:1, піковим обертовим моментом 54 Н·м та номінальним обертовим моментом 35 Н·м, він забезпечує точну, стабільну та потужну роботу. Оснащений комунікацією EtherCAT та CAN BUS, системою подвійного енкодера ABS-17BIT та перехресними роликовими підшипниками, цей мотор забезпечує виняткову точність управління та довговічність. Його компактний порожнистий дизайн (Ø80 мм × 90.2 мм) та вага 1.11 кг роблять його ідеальним для роботизованих рук, колаборативних роботів та автоматизованих систем, які потребують високої щільності обертового моменту та точного управління рухом.
Ключові особливості
-
Високий обертовий момент та потужність: Номінальний обертовий момент 35 Н·м та піковий обертовий момент 54 Н·м для вимогливих застосувань.
-
Двостороння комунікація: Підтримує EtherCAT та CAN BUS протоколи для безшовної інтеграції та швидкої реакції.
-
Точне управління: Два ABS-17BIT енкодери для введення та виведення забезпечують точне позиціонування з <0.01° повторюваністю.
-
Компактний та легкий: Конструкція порожнистого валу з вагою лише 1.11 кг, оптимізована для високої щільності крутного моменту.
-
Надійна конструкція: Оснащений перехресними роликовими підшипниками для підвищеної вантажопідйомності та довговічності.
-
Промислова надійність: Клас ізоляції F, високошвидкісний MCU та оптимізоване тепловідведення для стабільної роботи в довгостроковій перспективі.
Параметри продукту
| Параметр | Значення |
|---|---|
| Передаточне число | 100:1 |
| Вхідна напруга | 48 В |
| Швидкість без навантаження | 30 об/хв |
| Струм без навантаження | 0.6 А |
| Номінальна швидкість | 25 об/хв |
| Номінальний момент | 35 Н·м |
| Номінальна потужність | 91 Вт |
| Номінальний струм | 4.7 А (середнє квадратичне) |
| Піковий момент | 54 Н·м |
| Піковий струм | 7.4 A (rms) |
| Постійна зворотного ЕМП | 19.2 Vdc/Krpm |
| Постійна моменту модуля | 7.4 N·m/A |
| Опір фази двигуна | 0.70 Ω |
| Індуктивність фази двигуна | 0.47 mH |
| Парні полюси | 10 |
| Зазор | <40 Арксекунд |
| Радіальне навантаження | Статичне: 16.3 kN / Динамічне: 10.4 kN |
| Оосне навантаження | Статичне: 78.2 kN / Динамічне: 20.8 kN |
| Інерція | N: 0.52 kg·m² / B: 0.56 kg·m² |
| Точність повторення позиції | <0.01° |
| Комунікація | CAN BUS & EtherCAT |
| Вага | Нетто: 1.11 кг / Упаковано: 1.28 кг |
| Клас ізоляції | F |
Тип енкодера
-
Вхідний енкодер: ABS-17BIT
-
Вихідний енкодер: ABS-17BIT
-
Надає точний зворотний зв'язок про рух для підвищення точності управління.
Монтаж та розміри
-
Розмір: Ø80 мм × 90.2 мм
-
Монтаж: Багато отворів та різьбових інтерфейсів для надійного монтажу.
-
Порожнистий вал: Оптимізований для прокладки кабелів у роботизованих руках та автоматизованих системах.
Інтерфейс та проводка
-
Порти EtherCAT: Вхідні та вихідні термінали для з'єднання мережі.
-
Порти CAN BUS: CAN_H та CAN_L для зв'язку.
-
Термінали живлення: З'єднувачі XT30 для надійної подачі живлення.
-
Допоміжні з'єднання: Інтерфейси батареї пам'яті та резистора для розрядки для розширених налаштувань управління.
Вміст упаковки
-
Актюатор: MyActuator RH-17 Порожнистий гармонічний мотор ×1
-
A. Кабель живлення ×2
-
B. Кабель для зв'язку CAN BUS ×4
-
C. 120Ω Термічний опір ×1
-
D. EtherCAT Комунікаційний кабель ×2
-
E. CAN BUS Комунікаційний модуль ×1 (Безкоштовний USB-CAN адаптер включено в кожне замовлення)
Застосування
-
Співпраця роботизованих рук
-
Системи промислової автоматизації
-
Гуманоїдні та чотириногі роботи
-
Платформи точного руху
-
Автономні роботизовані суглоби для досліджень та розробок
Деталі

Роботизований мотор RH-17 пропонує подвійний енкодер, CAN BUS & EtherCAT, передатне число 100:1, 48V, 35 N.m крутний момент, 91W потужності. Доступний з/без гальма. Включає креслення та параметри.
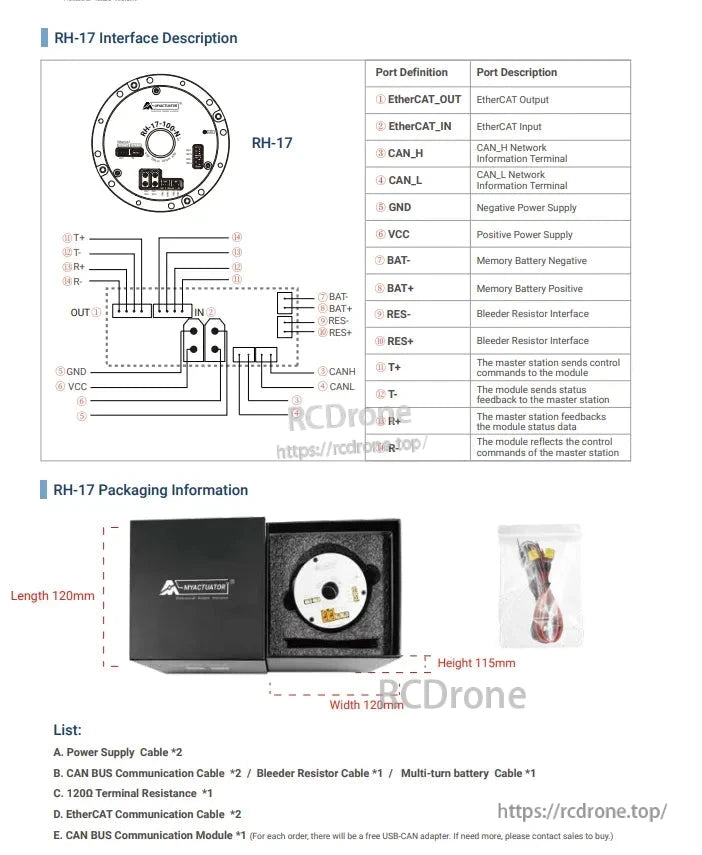
Інтерфейс RH-17 включає підключення EtherCAT, CAN-шини, живлення та акумулятора. Упаковка містить кабелі, резистори та модуль. Розміри: 120×120×115мм. Список включає кабелі живлення, CAN, EtherCAT, резистор та комунікаційний модуль.
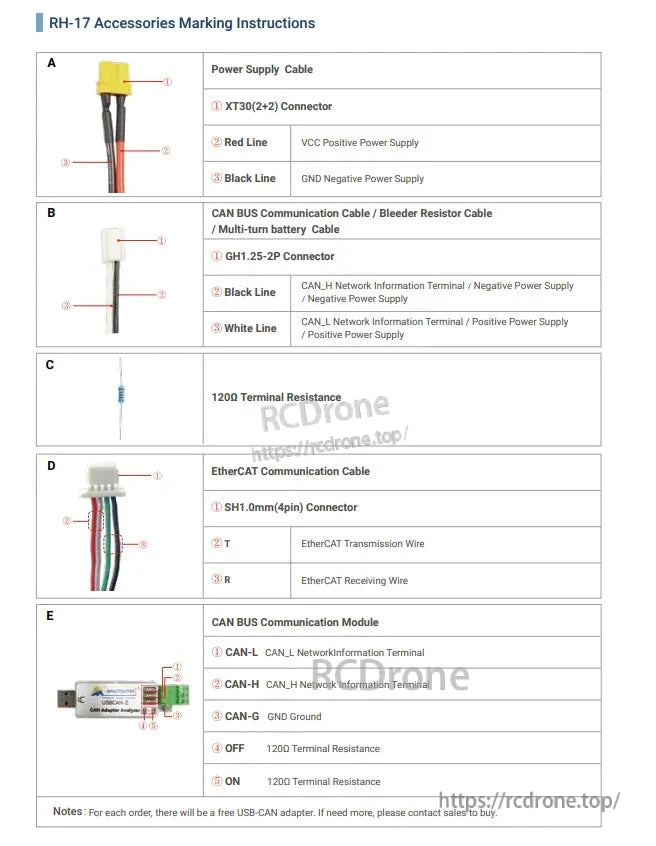
Аксесуари RH-17 включають кабелі живлення, CAN BUS, EtherCAT, резистор 120Ω та комунікаційний модуль. Деталі охоплюють з'єднувачі, кольори проводів, функції та опори терміналів для кожного компонента. Адаптер USB-CAN включено в замовлення.
Related Collections







