






Модуль порожнистого гармонічного з'єднання MyActuator RH-32, 48В, піковий момент 229Нм, подвійні 17-бітні енкодери, CAN BUS & керування EtherCAT
Модуль порожнистого гармонічного з'єднання MyActuator RH-32, 48В, піковий момент 229Нм, подвійні 17-бітні енкодери, CAN BUS & керування EtherCAT
MyActuator
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Модуль MyActuator RH-32 Hollow Harmonic Robot Joint є висококрутильним, високоточним актуатором, призначеним для роботизованих рук, гуманоїдних роботів та систем колаборативної автоматизації. З передатним відношенням 100:1, вхідною напругою 48 В та піковим крутним моментом 229 Н·м, RH-32 забезпечує виняткову продуктивність для застосувань, що вимагають плавного руху, точного контролю та високої вантажопідйомності. Завдяки підтримці подвійних енкодерів (17-бітний вхід/вихід), CAN BUS &та EtherCAT зв'язку, а також конструкції з порожнистим валом, він безперешкодно інтегрується в сучасні роботизовані системи.
Ключові особливості
-
Висока продуктивність крутного моменту – забезпечує до 150 Н·м номінального крутного моменту та 229 Н·м пікового крутного моменту, що ідеально підходить для важких роботизованих суглобів.
-
Точний контроль – Подвійні 17-бітні енкодери забезпечують точний зворотний зв'язок і повторюваність <0.01°.
-
Універсальна комунікація – Підтримує CAN BUS та EtherCAT для надійної та гнучкої інтеграції систем.
-
Міцна вантажопідйомність – Витримує до 342.6 kN осьового статичного навантаження та 81.6 kN осьового динамічного навантаження.
-
Компактний порожнистий дизайн – Полегшує прокладку кабелів через з'єднання для більш чистого та безпечного налаштування роботів.
-
Висока надійність – Клас ізоляції F та вдосконалений дизайн відведення тепла для промислової довговічності.
Технічні характеристики
| Параметр | Одиниця | Значення |
|---|---|---|
| Передаточне число | — | 100 |
| Вхідна напруга | В | 48 |
| Швидкість без навантаження | Об/хв | 20 |
| Струм без навантаження | А | 2.8 |
| Номінальна швидкість | Об/хв | 18 |
| Номінальний момент | Н·м | 150 |
| Номінальна потужність | Вт | 282 |
| Номінальний струм | А(rms) | 21.8 |
| Максимальний обертовий момент | N·м | 229 |
| Максимальний струм | A(rms) | 32.1 |
| Постійна зворотного ЕМП двигуна | Вdc/Коберт. | 26.7 |
| Постійна обертового моменту модуля | N·м/A | 6.9 |
| Опір фази двигуна | Ω | 0.08 |
| Індуктивність фази двигуна | мГн | 0.18 |
| Пар півдоларів | — | 10 |
| 3-фазне з'єднання | — | Y |
| Зазор | Арксекунд | < 40 |
| Радіальне навантаження (статичне/динамічне) | кН | 65.4 / 38.2 |
| Оосеве навантаження (статичне/динамічне) | кН | 342.6 / 81.6 |
| Інерція (N/B) | кг·м² | 6.86 / 8.32 |
| Тип енкодера | — | Двохканальний енкодер ABS-17BIT (Вхід/Вихід) |
| Точність повторення позиції | Градус | < 0.01 |
| Зв'язок | — | CAN BUS & EtherCAT |
| Вага (N/B) | кг | 4.32 / 4.74 |
| Клас ізоляції | — | F |
Опис інтерфейсу
RH-32 підтримує EtherCAT та CAN зв'язок, забезпечуючи надійне управління в реальному часі.
-
EtherCAT: Високошвидкісна детермінована комунікація для промислової автоматизації.
-
CAN BUS: Гнучка та стабільна комунікація для складних багатосуглобових систем.
-
Спеціалізовані роз'єми для живлення, зворотного зв'язку та контрольних сигналів забезпечують надійну та ефективну інтеграцію.
Інформація про упаковку
-
Розміри коробки: 165мм × 165мм × 127мм
-
Включені аксесуари:
-
Кабель живлення × 2
-
Кабель зв'язку CAN BUS × 2
-
Кабель резистора-випускника × 1
-
Кабель багатократного з'єднання батареї × 1
-
Опір терміналу 120Ω × 1
-
Кабель зв'язку EtherCAT × 2
-
Модуль зв'язку CAN BUS × 1 (з безкоштовним адаптером USB-CAN)
- MyActuator Модуль роботизованого суглоба RH-32-100 x 1
-
Застосування
-
Співпраця роботів (коботи)
-
Гуманоїдні та сервісні роботи
Індустріальні маніпулятори
-
Автоматизовані керовані транспортні засоби (AGVs)
-
Системи прецизійного позиціонування
Деталі
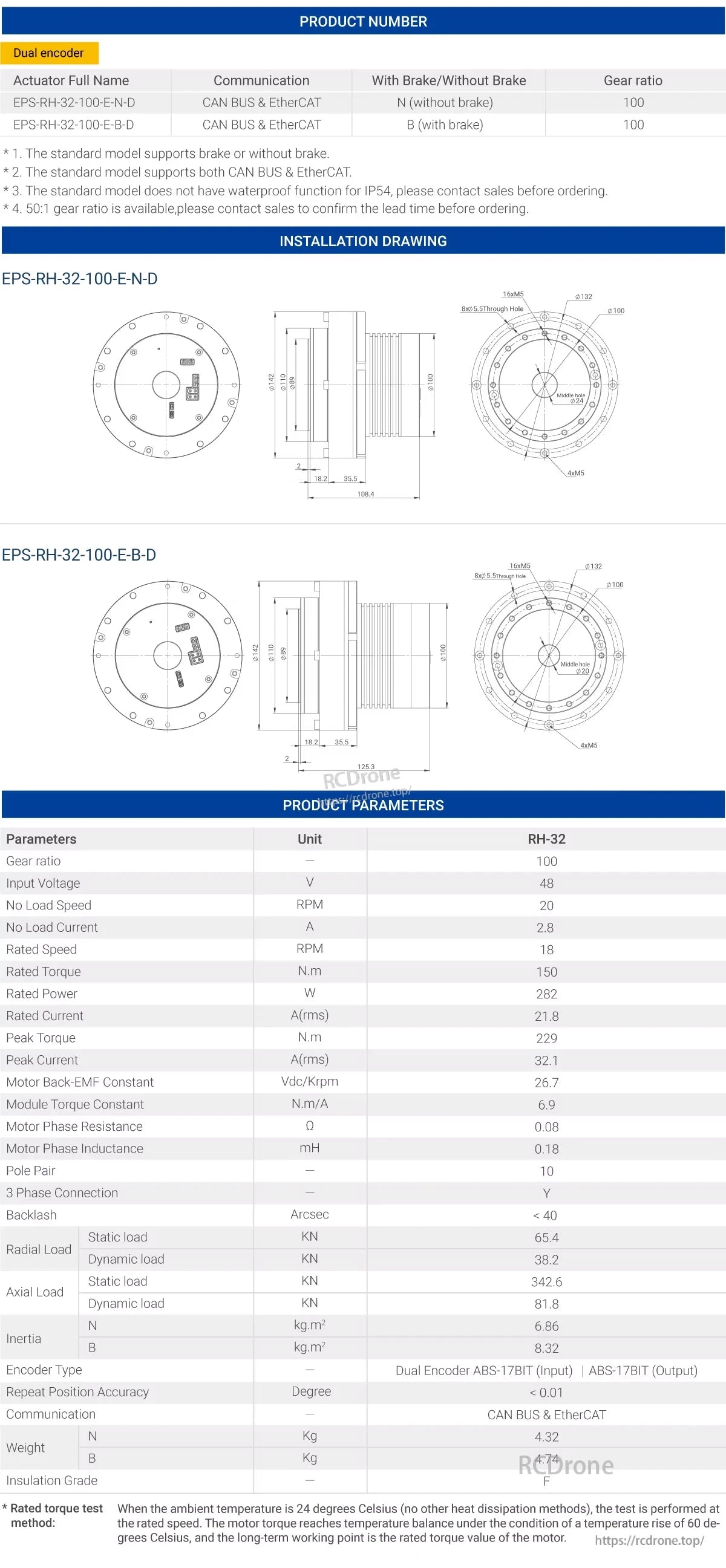
Роботизований суглоб RH-32 пропонує подвійний енкодер, CAN BUS/EtherCAT, передатне співвідношення 100:1, 48V, 150 N.m обертового моменту, 21.8 Актуальний. Додаткове гальмо, IP54 доступно.
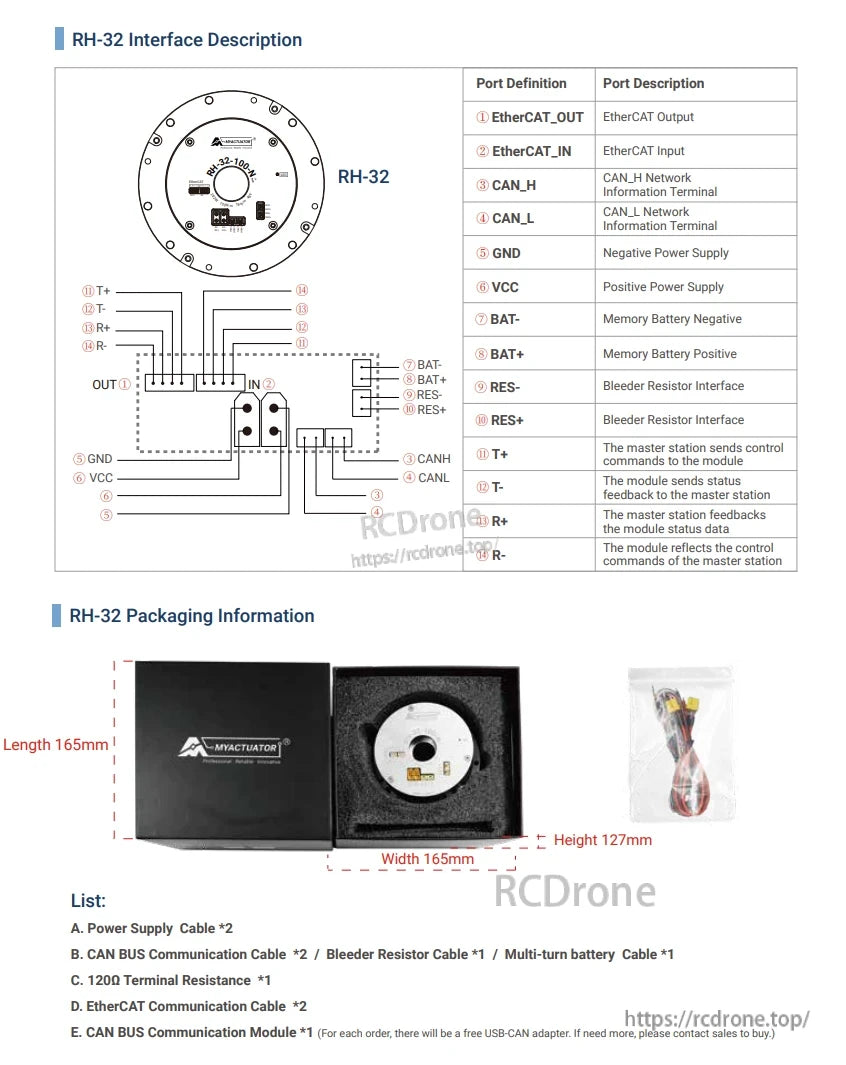
Роботизований суглоб RH-32 має інтерфейси EtherCAT та CAN, визначення портів, розміри 165x165x127мм. Включає кабелі, термінальний резистор, модуль CAN.
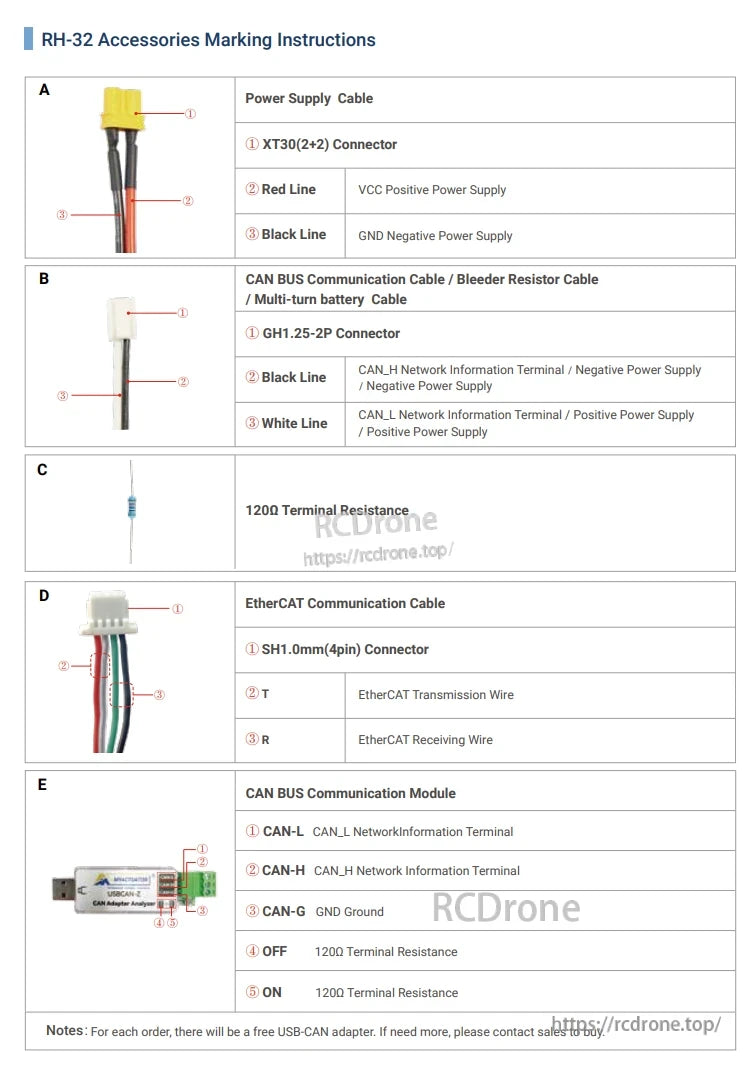
Аксесуари RH-32 включають кабелі живлення, CAN BUS, EtherCAT, резистор 120Ω та модуль CAN. Деталі охоплюють з'єднувачі, функції проводів та термінальні опори для належної установки та зв'язку. Безкоштовний адаптер USB-CAN включено з кожним замовленням.
Related Collections






