






Привід MyActuator RMD-X4-10 Планетарний Актуатор 10Н·м, Два Енкодери, EtherCAT+CAN, Привід для Роботизованих З'єднань
Привід MyActuator RMD-X4-10 Планетарний Актуатор 10Н·м, Два Енкодери, EtherCAT+CAN, Привід для Роботизованих З'єднань
MyActuator
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
MyActuator RMD-X4-10 планетарний актуатор є модулем з високою продуктивністю на базі постійного струму, призначеним для передових робототехнічних застосувань. Він має планетарне передатне число 12.6:1, піковий крутний момент 10N·m та номінальну вихідну потужність 100W, інтегруючи подвійну систему енкодерів (вхід 17 біт / вихід 18 біт), яка забезпечує точність контролю 0.01°. Його велика порожниста структура підтримує інтеграцію багатьох датчиків, що дозволяє створити центральний вузол для контролю повної постури в гуманоїдних роботах. Завдяки двохпротокольній комунікації EtherCAT і CAN, актуатор досягає ультрашвидкої реакції 250μs, що робить його ідеальним для сценаріїв з високою динамікою та надійністю, таких як гуманоїдні роботи, біонічні приводні ноги та промислова автоматизація.
Ключові особливості
-
Висока точність подвійного енкодера: вхід 17 біт / вихід 18 біт з 0.01° точність
-
Піковий момент 10N·m з планетарним передавальним співвідношенням 12.6:1
-
Перехресний роликовий підшипник: Виняткова здатність до антизгинального моменту для стабільних роботизованих суглобів
-
EtherCAT + CAN Bus Двостороння комунікація: Підтримує зв'язок між кількома машинами, надшвидка реакція 250μs
-
Велика порожниста структура: Дозволяє інтеграцію датчиків, кабелів та ковзних кілець для складних роботизованих систем
-
Висока надійність: Розроблено для контролю ходи людини, плавні переходи для бігу, стрибків та складних рухів
-
Компактний та легкий: Φ55mm × 55.5mm, вага 0.33кг
Технічні характеристики
| Параметр | Значення |
|---|---|
| Модель | RMD-X4-10 |
| Передаточне число | 12.6:1 |
| Вхідна напруга | 24В DC |
| Номінальна швидкість | 238 об/хв |
| Швидкість без навантаження | 317 об/хв |
| Номінальна вихідна потужність | 100Вт |
| Номінальний момент | 4Н·м |
| Піковий момент | 10Н·м |
| Номінальний струм | 7.84A |
| Струм без навантаження | 1A |
| Тип енкодера | Двохканальний енкодер (ABS-17bit / 18bit) |
| Зв'язок | EtherCAT + CAN Bus |
| Вага | 0.33кг |
| Розмір | Ø55мм × 55.5мм |
Застосування
-
Гуманоїдні роботи – Спільні приводи для рук, ніг та торсу
-
Біонічні приводи для ніг – Високий крутний момент з антизгинальним дизайном для бігу та стрибків
-
Колаборативні роботи – Плавне управління рухом для промислової автоматизації
-
Екзоскелети – Легкі, високодинамічні актуатори для пристроїв, що допомагають людині
-
Гнучкі виробничі лінії – Мультиосьова синхронізація через високошвидкісну комунікацію EtherCAT
Упаковка та аксесуари
-
Блок живлення + CAN Bus комунікаційний кабель ×1
-
120Ω термінальний опір ×1
Кабель EtherCAT для зв'язку ×2
-
Комунікаційний модуль CAN Bus ×1 (адаптер USB-CAN включено в кожне замовлення)
Розміри упаковки: 100мм × 100мм × 70мм
Деталі

RMD-X4-PT2.5-10-C двоканальний енкодер роботизованого суглобового приводу з вхідною напругою 24В, передавальним відношенням 12.6, моментом 4N·м та виходом 100Вт. Має інтерфейс CAN BUS/EtherCAT, швидкість без навантаження 317 об/хв та вагу 0.28кг. Включає розміри для встановлення та технічні характеристики.

Планетарний актуатор з піковим моментом 10N·м, передавальним відношенням 12.6:1, вагою 0.33кг. Розмір: Ø55мм×55.5мм. Має комунікацію EtherCAT/CANBUS, двоканальний енкодер, високошвидкісний мікроконтролер, CAN-чіпи та глибокі канавкові підшипники.

Двоканальний енкодер ABS-17BIT Вхід / 18BIT Вихід, X4-10, SN:40225621, MYACTUATOR

Планетарний актуатор RMD-X4-10 від MYACTUATOR пропонує потужність 100Вт, момент 46Nm, двоканальний енкодер, швидкість 238об/хв. Поставляється з кабелем живлення + CAN BUS, резистором 120Ω, кабелем EtherCAT, модулем CAN BUS та безкоштовним адаптером USB-CAN.
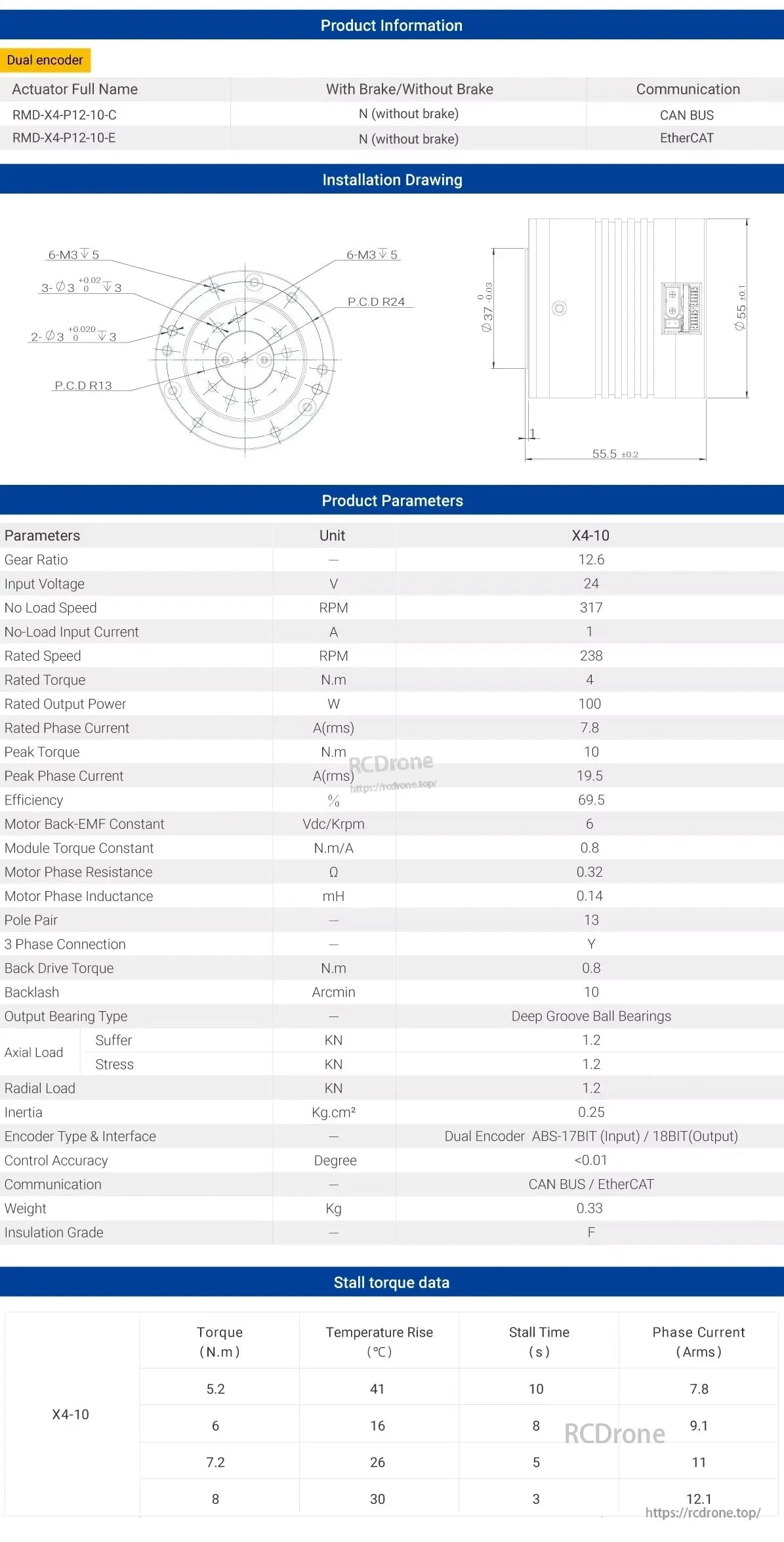
Роботизований планетарний актуатор RMD-X4-10 має двоканальний енкодер, 12.6 передаточне співвідношення, вхідна напруга 24В, вихідна потужність 100Вт, та CAN BUS/EtherCAT. Він забезпечує момент сили 4Н·м, швидкість 238 об/хв, важить 0.33кг та використовує глибокі канавкові кулькові підшипники для високої ефективності.

Інтерфейс X4-10 включає порти живлення, CAN та EtherCAT. Упаковка містить блок живлення, кабелі, резистори та модуль. Розміри: 100x100x70мм. Включає адаптер USB-CAN з кожним замовленням.

Аксесуари X4-10 включають блок живлення, кабелі CAN BUS та EtherCAT, термінальний резистор та модуль CAN BUS. Деталі охоплюють з'єднувачі, функції проводів, сигнальні лінії та примітки щодо адаптера USB-CAN.
Related Collections






