





MyActuator RMD-X4-36 34Н·м планетарний привід, безщітковий DC-двигун з подвійним енкодером, EtherCAT і CAN-шина, передавальне число 36:1
MyActuator RMD-X4-36 34Н·м планетарний привід, безщітковий DC-двигун з подвійним енкодером, EtherCAT і CAN-шина, передавальне число 36:1
MyActuator
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Актюатор MyActuator RMD-X4-36 Планетарний Актюатор DC Безщітковий Мотор є високопродуктивним спільним актюатором, розробленим для робототехніки та автоматизаційних систем, які потребують точного керування рухом, високого крутного моменту та компактної інтеграції. З піковим крутним моментом 34N·m, передатним відношенням 36:1 та структурою з перехресними роликовими підшипниками, він забезпечує відмінну здатність до протистояння вигину та довговічність. Оснащений двома протоколами зв'язку EtherCAT + CAN та ультрашвидкою реакцією 250μs, цей актюатор ідеально підходить для гуманоїдних роботів, роботизованих рук, мобільних платформ та інших передових роботизованих застосувань. Його дизайн з подвійним енкодером (вхід ABS 17-біт / вихід 18-біт) забезпечує ультра-високу точність позиціонування, тоді як компактний розмір (55мм × 61мм, 0.36кг) дозволяє легку та ефективну інтеграцію.
Ключові особливості
-
Висока точність подвійного енкодера: 17-бітний (вхід) + 18-бітний (вихід) для точності 0.01°.
-
Протоколи EtherCAT + CAN Bus: Гнучка комунікація з ультра-швидкою реакцією 250μs.
-
Перехресні роликові підшипники: Висока стійкість до вигинання та тривалий термін служби.
-
Висока потужність: Компактний діаметр 55мм, довжина 61мм та вага лише 0.36кг.
-
Піковий момент 34N·m та Номінальний момент 11.5N·m забезпечують стабільний, потужний вихід руху.
-
Висока ефективність: Номінальна потужність 100W з плавною технологією FOC (керування з орієнтацією на поле).
-
Універсальне застосування: Розроблено для гуманоїдних роботів, екзоскелетів, маніпуляторів та автоматизованих систем.
Специфікації
| Параметр | Значення |
|---|---|
| Модель | RMD-X4-P36-36-C |
| Вхідна напруга | 24V |
| Передаточне число | 36:1 |
| Швидкість без навантаження | 111 об/хв |
| Струм без навантаження | 0.9 A |
| Номінальна швидкість | 83 об/хв |
| Номінальний момент | 11.5 N·m |
| Номінальна вихідна потужність | 100 W |
| Піковий момент | 34 N·m |
| Піковий фазовий струм | 21.5 A (rms) |
| Пар пів | 13 |
| Тип енкодера | Двохканальний енкодер ABS 17-біт (вхід) / 18-біт (вихід) |
| Протоколи зв'язку | EtherCAT / CAN Bus |
| Розмір | Ø55мм × 61мм |
| Вага | 0.36 кг |
Вміст упаковки
-
1 × RMD-X4-36 Планетарний актуаторний мотор
-
1 × Блок живлення + CAN Bus комунікаційний кабель
-
1 × 120Ω термінальний резистор
-
2 × EtherCAT комунікаційні кабелі
-
1 × CAN Bus комунікаційний модуль (USB-CAN адаптер)
Застосування
-
Гуманоїдні та біонічні роботи
-
Співпраця роботизованих рук
-
Екзоскелети та реабілітаційні роботи
-
Сервісні роботи та мобільні платформи
-
Системи прецизійної автоматизації, що вимагають компактних, висококрутних актуаторів
Деталі

Планетарний актуатор з 34N.m піковим обертовим моментом, передаточне число 36:1, 0.36кг вага, Ø55мм×61мм розмір. Особливості: EtherCAT/CANBUS зв'язок, подвійний енкодер, високошвидкісний MCU, CAN чіпи та перехресні роликові підшипники.

Двигун RMD-X4-P36-36C: 24В, 10.5N.m крутний момент, 83RPM, подвійний енкодер, EtherCAT+CAN BUS, 36 передатне співвідношення, 0.36кг, ABS-17BIT/18BIT енкодер, детальні розміри включені.

Двигун X4-36, 100W, 12N.m, подвійний енкодер, 17BIT вхід, 18BIT вихід, 63об/хв, 1:36 передатне співвідношення, CAN bus інтерфейс, LED індикатор.

Двигун MYACTUATOR X4-36, 100W, 12N.m, подвійний енкодер, 83об/хв, 1:36 співвідношення. Включає блок живлення, CAN BUS кабель, 120Ω резистор, EtherCAT кабелі та CAN BUS модуль з безкоштовним USB-CAN адаптером.
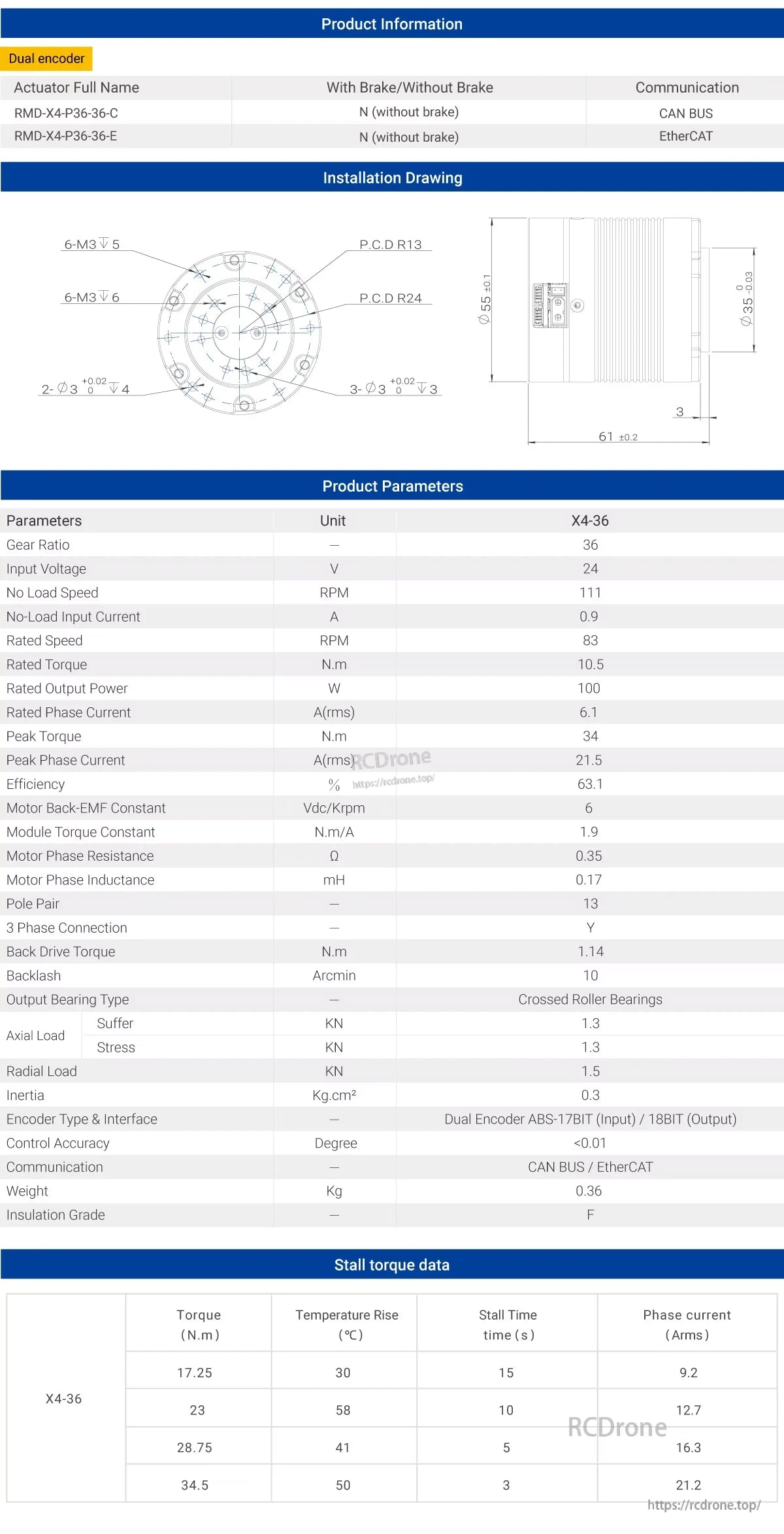
Двигун RMD-X4-P36-36 має подвійний енкодер, 36 передатне співвідношення, 24В вхід, 100W вихід, CAN BUS/EtherCAT. Номінальний крутний момент: 10.5 N.m, швидкість: 83 RPM, вага: 0.36 кг. Дані про крутний момент при застряганні включають крутний момент, підвищення температури, час та значення фазного струму.

Деталі інтерфейсу включають порти живлення, CAN та EtherCAT. Упаковка містить мотор, кабелі, резистори, комунікаційні модулі. Розміри: 100x100x70мм. Включає адаптер USB-CAN.
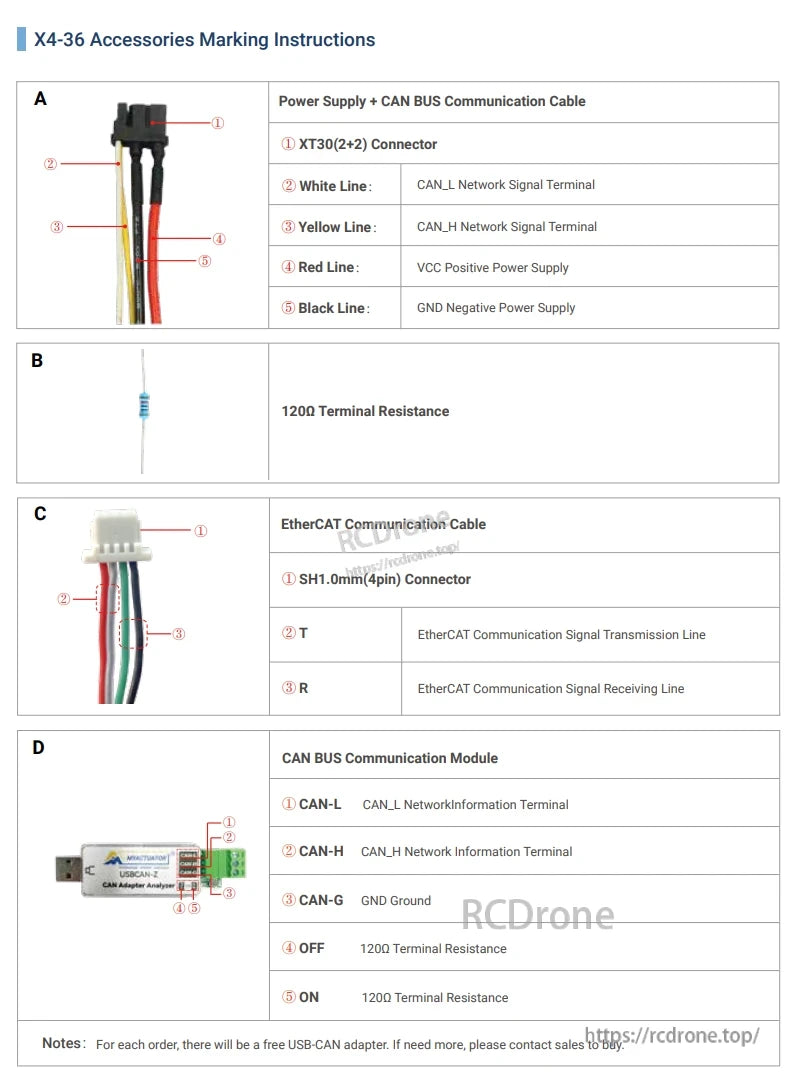
Аксесуари X4-36 включають блок живлення, кабелі CAN BUS, EtherCAT, резистор 120Ω та модуль CAN. Деталі охоплюють з'єднувачі, кольори проводів, сигнальні лінії та налаштування терміналів для комунікаційних та електроживлення з'єднань. Адаптер USB-CAN включено в кожне замовлення.
Related Collections





