





Сервопривід MyActuator RMD-X6-60 з двома енкодерами 320Вт 20Н·м 60Н·м пік 48В EtherCAT CAN BUS Високоточний мотор для роботизованих з'єднань
Сервопривід MyActuator RMD-X6-60 з двома енкодерами 320Вт 20Н·м 60Н·м пік 48В EtherCAT CAN BUS Високоточний мотор для роботизованих з'єднань
MyActuator
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Інтелектуальний сервопривід MyActuator RMD-X6-60 є компактним, високопродуктивним інтегрованим приводом, розробленим для робототехніки, автоматизації та точного управління рухом. Оснащений інтерфейсами зв'язку EtherCAT та CAN BUS і подвійною системою енкодерів, цей привід пропонує високу щільність крутного моменту, точне управління та багатофункціональне управління рухом. Він ідеально підходить для суглобів роботів, роботизованих рук, мобільних роботів та промислових автоматизованих систем, які вимагають високої точності та надійності.
Ключові параметри:
-
Номінальна потужність: 320W
-
Номінальний крутний момент: 20N·m
-
Піковий крутний момент: 60N·m
-
Номінальна швидкість: 153RPM
-
Передатне число: 19.612:1
-
Точність двохканального енкодера: 17-бітний вхід / 17-бітний вихід
-
Комунікаційні протоколи: CAN BUS, EtherCAT
-
Вхідна напруга: 48V
Ключові особливості
-
Дизайн двохканального енкодера
Інтегровані 17-бітні вхідні та вихідні енкодери забезпечують точний зворотний зв'язок для точного керування рухом і моніторингу стану. -
Підтримка кількох протоколів
Вбудовані EtherCAT та CAN BUS інтерфейси забезпечують широку сумісність з різними платформами керування роботами та автоматизацією. -
Висока потужність і крутний момент
Здатний забезпечити 320W безперервної потужності та 60N·m пікового крутного моменту, що відповідає вимогам динамічних і важких навантажень. -
Гібридні режими управління
Підтримує гібридне управління положенням, швидкістю та моментом, що дозволяє реалізувати складні багатосистемні та координовані рухи. -
Високоточний зворотний зв'язок та швидка реакція
Вбудовані високошвидкісні мікроконтролери та процесори CAN забезпечують реакцію на рівні мілісекунд для точного управління. -
Компактний та легкий дизайн
Розміри 120мм × 120мм × 80мм та вага 0.82кг роблять його ідеальним для легких роботизованих застосувань, де критично важливі простір та вага.
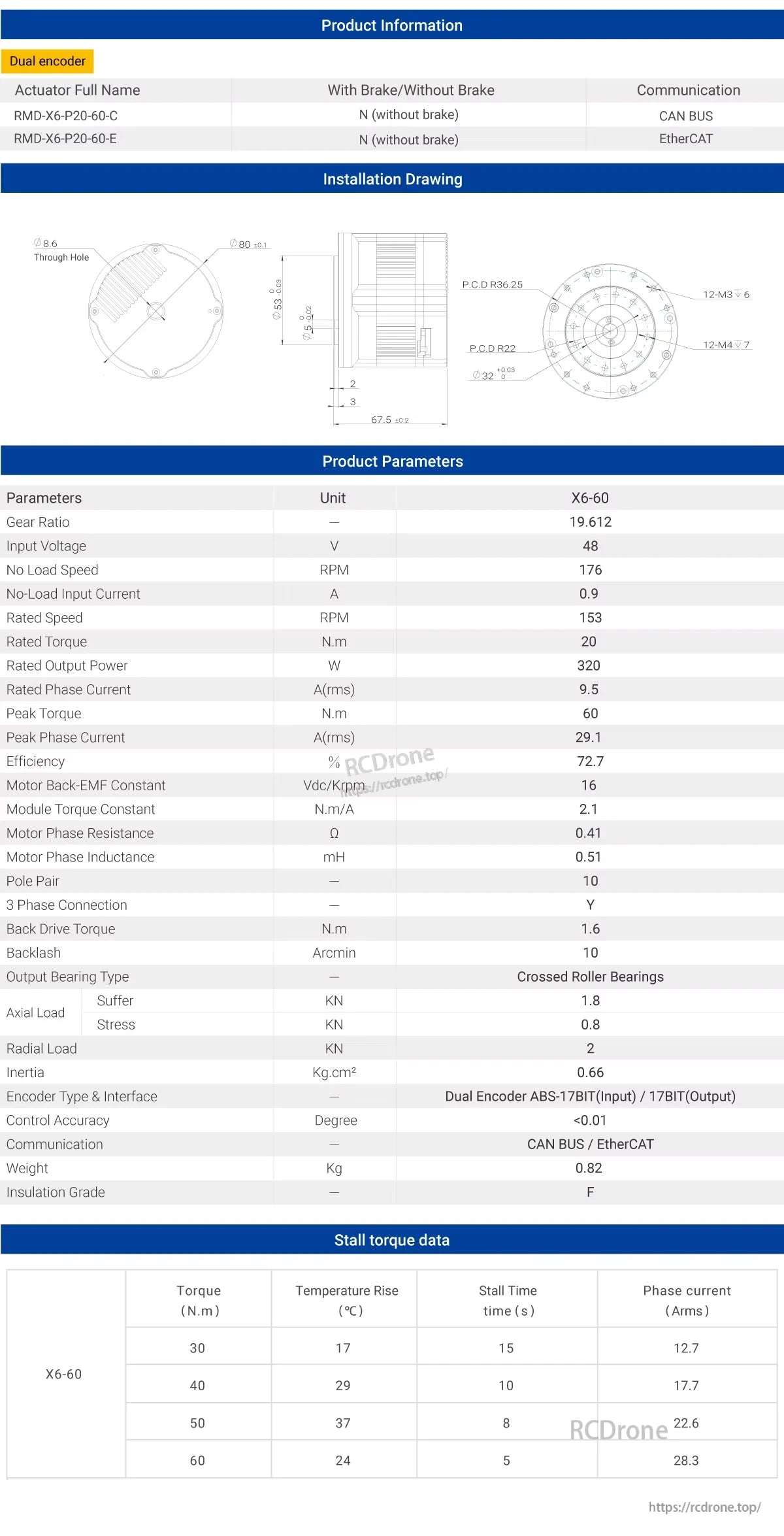
Технічні характеристики
| Параметр | Значення |
|---|---|
| Модель | RMD-X6-P20-60-C |
| Вхідна напруга | 48V |
| Номінальна потужність | 320W |
| Номінальний момент | 20N·m |
| Піковий момент | 60N·m |
| Номінальна швидкість | 153RPM |
| Швидкість без навантаження | 176RPM |
| Номінальний струм | 9.5A (RMS) |
| Струм без навантаження | 0.9A |
| Піковий струм | 29.1A (RMS) |
| Передатне число | 19.612:1 |
| Пари полюсів | 10 |
| Роздільна здатність енкодера | Вхід: 17 біт / Вихід: 17 біт |
| Вага | 0.82кг |
Опис інтерфейсу
Порти живлення та зв'язку
| Порт | Опис |
|---|---|
| EtherCAT_OUT | Порт виходу EtherCAT |
| EtherCAT_IN | Порт входу EtherCAT |
| CAN_L | Термінал низького сигналу CAN |
| CAN_H | Термінал високого сигналу CAN |
| GND | Негативне живлення |
| VCC | Позитивне живлення |
Термінали сигналу
R+/R-: Дані зворотного зв'язку від модуля до головної станції
-
T+/T-: Сигнали керуючих команд від головної станції до модуля
Розміри та структура
-
Діаметр: 120мм
-
Висота: 80мм
-
Отвори для монтажу: P.C.D R26.25 і R22 з 12 × M4 різьбовими отворами
-
Вихідний вал: Стандартний фланцевий інтерфейс для гнучкого з'єднання з зовнішніми компонентами
Інформація про упаковку
| Включені елементи | Кількість |
|---|---|
| Блок живлення + CAN BUS комунікаційний кабель | 2 шт |
| EtherCAT комунікаційний кабель | 2 шт |
| 120Ω термінальний опір | 1 шт |
| CAN BUS комунікаційний модуль (USB-CAN адаптер) | 1 шт |
Розміри упаковки:
-
Довжина × Ширина × Висота: 120мм × 120мм × 80мм
Аксесуари та з'єднання
Блок живлення + CAN BUS кабель
-
З'єднувач: XT30 (2+2)
-
Біла лінія: сигнал CAN_L
-
Жовта лінія: сигнал CAN_H
-
Червона лінія: позитивне живлення VCC
-
Чорна лінія: негативне живлення GND
Кабель EtherCAT для зв'язку
-
З'єднувач: SH1.0мм (4-контактний)
-
Лінія T: Передача сигналу комунікації EtherCAT
-
Лінія R: Прийом сигналу комунікації EtherCAT
Модуль CAN BUS
-
Терміни: CAN_L, CAN_H, CAN_G, та перемикаюча 120Ω термінація (УВІМК./ВИМК.)
-
Адаптер USB-CAN надається безкоштовно з кожним замовленням
Застосування
-
Спільні роботизовані суглоби
-
Сервісні та гуманоїдні роботи
-
Системи керування або приводу мобільних роботів
-
Промислові роботизовані руки
-
Системи високоточної керування рухом
Дослідницькі та освітні платформи
Резюме
Актюатор MyActuator RMD-X6-60 інтегрує високоточні подвійні енкодери, протоколи зв'язку EtherCAT та CAN BUS, високу щільність крутного моменту та компактний форм-фактор, що робить його універсальним і надійним рішенням для робототехніки та промислової автоматизації. З потужністю 320 Вт, піковим обертовим моментом 60 Н·м та зворотним зв'язком високої роздільної здатності 17 біт, цей сервопривід забезпечує виняткову продуктивність та точність управління для просунутих проектів у галузі робототехніки.
Деталі
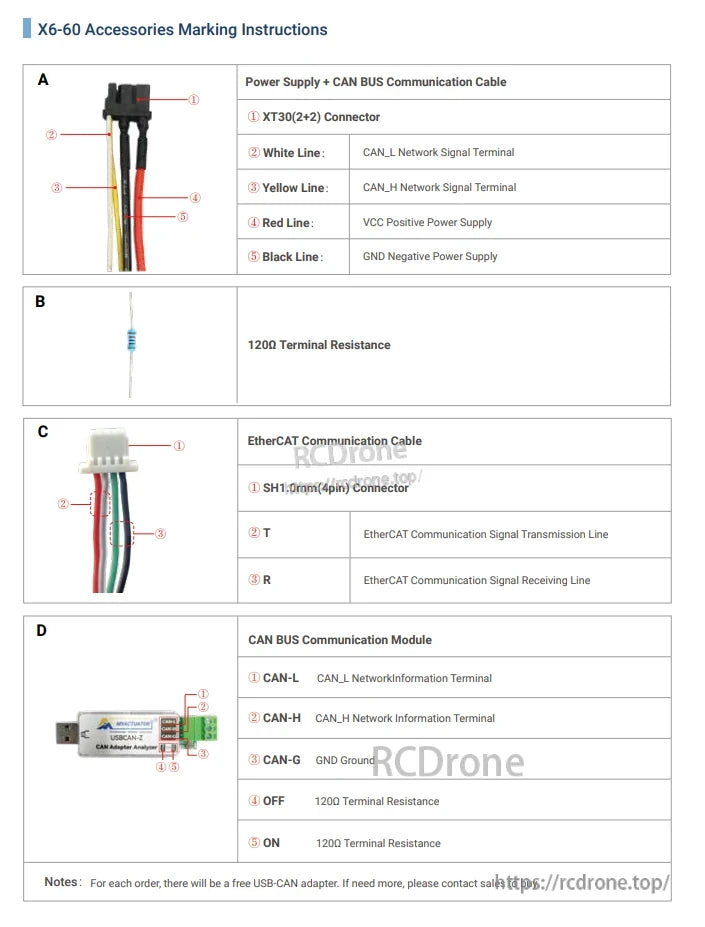
Аксесуари X6-60 включають кабель живлення та CAN BUS з кольоровими проводами, опір термінала 120Ω, кабель EtherCAT з лініями T/R та модуль CAN BUS з терміналами для CAN-L, CAN-H, GND та налаштуваннями опору термінала. Безкоштовний адаптер USB-CAN включено в кожне замовлення.

Сервопривід RMD-X6-P20-60-C з EtherCAT+CAN BUS, 19.612 співвідношення, 48V вхід, 153 об/хв номінальна швидкість, 20Нм крутний момент, 320Вт виходу, подвійний енкодер, високошвидкісний мікроконтролер та CAN чіп, перехресний роликовий підшипник.
Подвійний енкодер ABS-17BIT Вхід/Вихід, X6-60 сервопривід, 300Вт, 20Н·м, 128об/хв, підтримує гібридне управління силою-позицією, точне управління крутним моментом.
X6-60 сервопривід, 320Вт, 20Н·м, подвійний енкодер, 158об/хв, 1:20 співвідношення, з CAN BUS та EtherCAT кабелями, 120Ω термінатор, сертифікований CE ROHS.

Упаковка RMD-X6-60 сервоприводу з проводкою CAN BUS, силовим кабелем та 1200 резистором термінації.
Related Collections





