





OYMotion ROH-AP001 Декстерна роботизована рука, 6 ступенів свободи, 11 зчленувань, датчики сили, UART/RS485/CAN, PID-контроль, 0,7 с
OYMotion ROH-AP001 Декстерна роботизована рука, 6 ступенів свободи, 11 зчленувань, датчики сили, UART/RS485/CAN, PID-контроль, 0,7 с
OYMotion
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
OYMotion ROH-AP001 Декстерна рука - це роботизована рука з 11 рухомими суглобами та 6 вбудованими моторними драйверами, що забезпечують 6 активних ступенів свободи. Вбудований алгоритм керування двигуном PID забезпечує точне, повторюване захоплення та маніпуляцію об'єктами. Кожен палець інтегрує датчик сили для моніторингу в реальному часі та замкнутого контролю сили захоплення. Фізичні інтерфейси включають UART, RS485 або CAN FD, з підтримкою протоколу SerialCtrl, ModBus-RTU та CAN. Платформи ROS/ROS2 підтримуються для вторинної розробки через SDK (необхідна ліцензійна угода).
Ключові особливості
- 6 активних ступенів свободи та 11 артикуляцій; незалежно моторизовані пальці для природного захоплення.
- Вбудовані моторні драйвери та PID-керування; вся активація інтегрована в руку.
- Датчики сили на кожному пальці з тактильним зворотним зв'язком та управлінням силою в реальному часі.
- Обертання великого пальця з приводом плюс складний дизайн пальців.
- Операція з сенсорним екраном підтримується на кінчиках пальців.
- Швидкий рух: 0,7 с для повного згинання/розтягування та 0,7 с для повного обертання великого пальця.
- Вантажопідйомність: до 30 кг пасивного навантаження для чотирьох пальців (зігнуті), 10 кг на палець (зігнутий), 8 кг на палець (розтягнутий).
- Розміри та пропорції, подібні до людських; м'які подушечки пальців та силіконова рукавичка; індивідуальний дизайн зап'ястя; звуковий сигнал повідомлення.
- Інтерфейси та протоколи: UART/RS485/CAN з SerialCtrl та ModBus-RTU; CAN на 1M бод.
- Матеріали: алюмінієвий сплав, цинковий сплав, нержавіюча сталь, силікон, пластик.
Специфікації
| Активні ступені свободи | 6 |
| Рухомі суглоби (артикуляції) | 11 |
| Вертикальна відстань від кінчика середнього пальця до зап’ястя | 183 мм |
| Вертикальна відстань від кінчика великого пальця до зап’ястя | 95 мм |
| Довжина великого пальця | 111 мм |
| Максимальна ширина долоні | 82 мм |
| Діаметр зап’ястя | 49 мм |
| Максимальний кут відкриття та закриття з боку великого пальця | 0~31 ° |
| Максимальний кут відкриття та закриття великого пальця до долоні | 0~50 ° |
| Кут бічного обертання великого пальця | 0~90 ° |
| Час згинання/розгинання для повного діапазону на максимальній швидкості | 0.7 секунд |
| Час обертання великого пальця для повного діапазону на максимальній швидкості | 0.7 секунди |
| Активна сила кожного кінчика пальця в розтягнутому стані | ≥0.5 Kgf |
| Активна сила кожного кінчика пальця в зігнутому стані | ≥1.0 Kgf |
| Максимальна активна сила кінчика великого пальця | ≥1.0 Kgf |
| Максимальне пасивне навантаження для чотирьох пальців у зігнутому стані | 30 Kg |
| Максимальне пасивне навантаження для кожного пальця у зігнутому стані | 10 Kg |
| Максимальне пасивне навантаження для кожного пальця у розтягнутому стані | 8 Kg |
| Функція сенсорного екрану пальцем | Підтримується |
| Зворотний зв'язок сили пальця | Підтримується |
| Температура робочого середовища | -10 °C ~ +40 °C |
| Вологість робочого середовища | Максимальна відносна вологість 85% |
| Термін служби дизайну | 3 роки |
| Вага (включаючи зап’ястя) | 640 g ± 5 g |
| Комунікаційний інтерфейс | UART/RS485/CAN |
| Швидкість передачі даних | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| Підтримувані протоколи | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| Матеріали | Алюмінієвий сплав; цинковий сплав; нержавіюча сталь; силікон; пластик |
Застосування
- Роботизовані кінцеві ефектори та гуманоїдні роботи.
- Освітнє та дослідницьке обладнання.
- Біонічні протези.
- Промислова автоматизація та системи AGV.
Для отримання допомоги з замовленням, керівництвом з інтеграції або технічної підтримки, будь ласка, зв'яжіться з [email protected] or відвідайте https://rcdrone.top/.
Посібники
Деталі

ROHand забезпечує точність позиціонування ±1 мм завдяки вбудованому PID-керуванню двигуном і пропонує шість активних ступенів свободи для імітації рухів людської руки, таких як щипання та захоплення. Ідеально підходить для гуманоїдних роботів, роботизованих кінцевих ефекторів, систем інспекції, інтелектуальних біонічних протезів та освітніх або дослідницьких застосувань, його дизайн підтримує універсальну, точну маніпуляцію в складних завданнях.
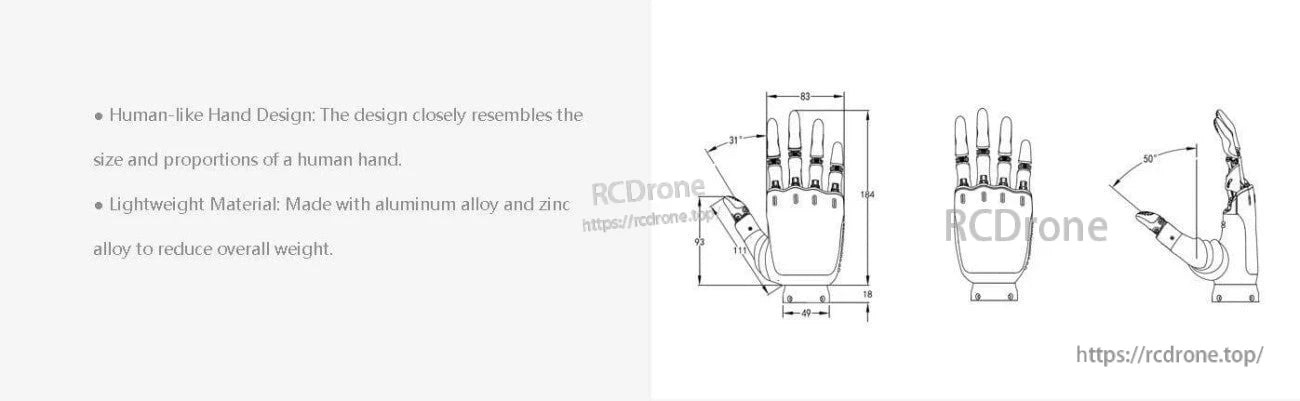
Рука робота, що нагадує людську, з легкого алюмінієвого цинкового сплаву та точними розмірами.

Рука-робот OYMotion ROH-AP001 імітує людські пропорції, має артикуляційні пальці та датчики для точного, реалістичного маніпулювання роботами.
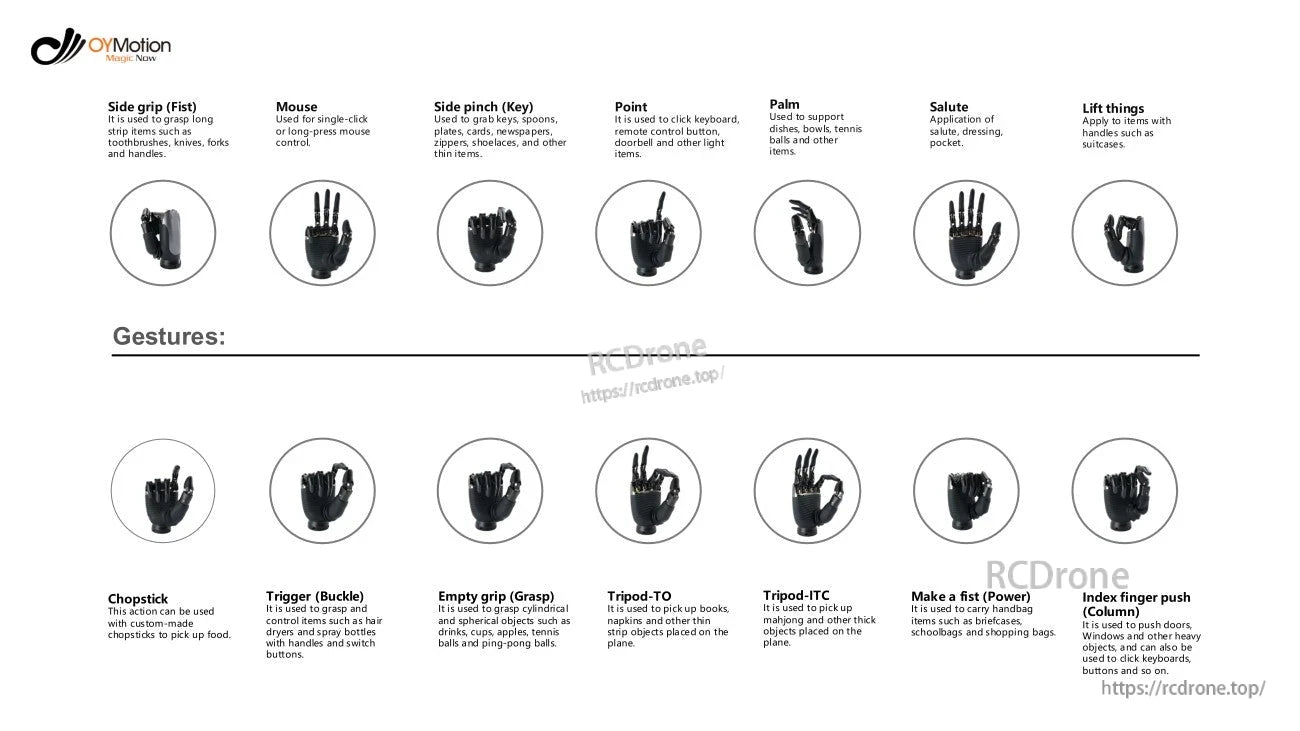
Рука-робот OYMotion виконує 14 точних жестів — таких як захоплення, вказування та піднімання — для виконання щоденних завдань, таких як використання паличок, перенесення сумок або натискання клавіш на клавіатурі, демонструючи високу спритність та практичну корисність.

Рука-робот OYMotion пропонує моторизовані пальці, складний дизайн, м'які подушки, живлений великий палець, силіконову рукавичку, вбудовану активацію, звуковий сигнал, індивідуальний зап'ястний механізм та роз'єм RS485 для спритного природного захоплення.
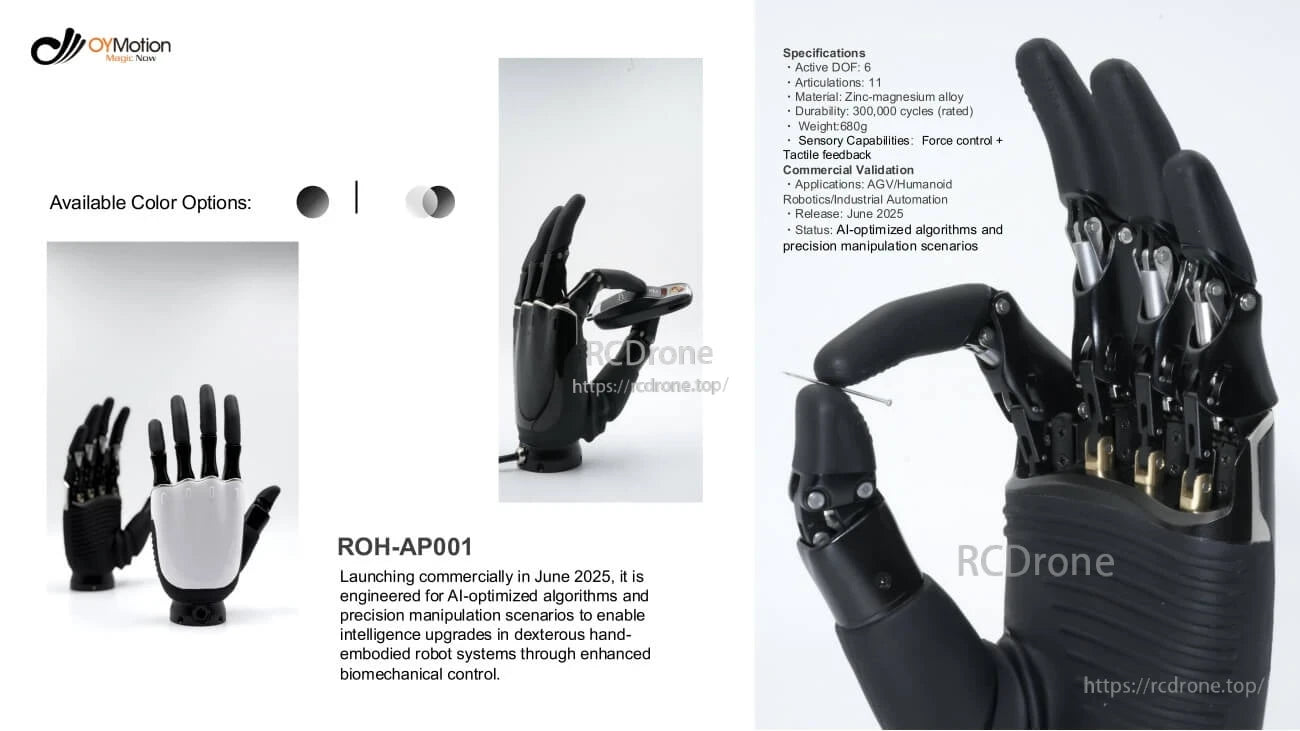
Рука-робот OYMotion ROH-AP001 має 6 активних ступенів свободи, 11 артикуляцій, виготовлена з цинково-магнієвого сплаву, має довговічність 300 тисяч циклів, важить 680 г та пропонує зворотний зв'язок по силі/дотикові відчуття для AI та точних завдань — запуск у червні 2025 року.

Роботизована рука OYMotion ROH-AP001 має моторизовані пальці, електричний великий палець, силіконову рукавичку та вбудовану активацію. Виготовлена з алюмінію, цинку, сталі, силікону та пластику, вона включає в себе звуковий сигнал, індивідуальний зап'ястний механізм, протокол RS485, складний дизайн та пружини тиску.
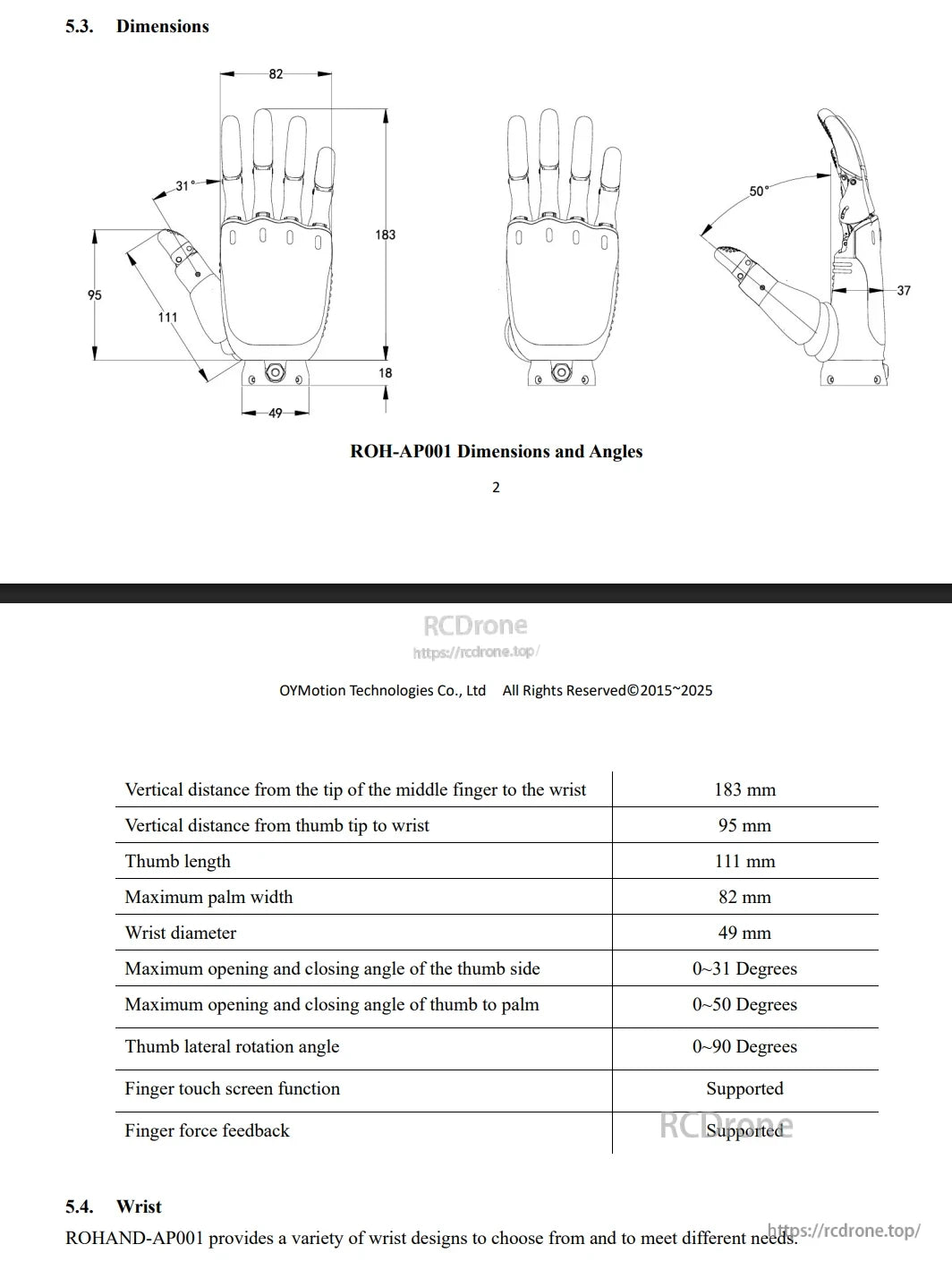
Розміри роботизованої руки ROH-AP001 включають висоту від пальця до зап'ястя 183 мм, від великого пальця до зап'ястя 95 мм, довжину великого пальця 111 мм, ширину долоні 82 мм, діаметр зап'ястя 49 мм. Кути великого пальця: 0-31° вбік, 0-50° до долоні, 0-90° обертання. Підтримує сенсорний екран та зворотний зв'язок за силою.
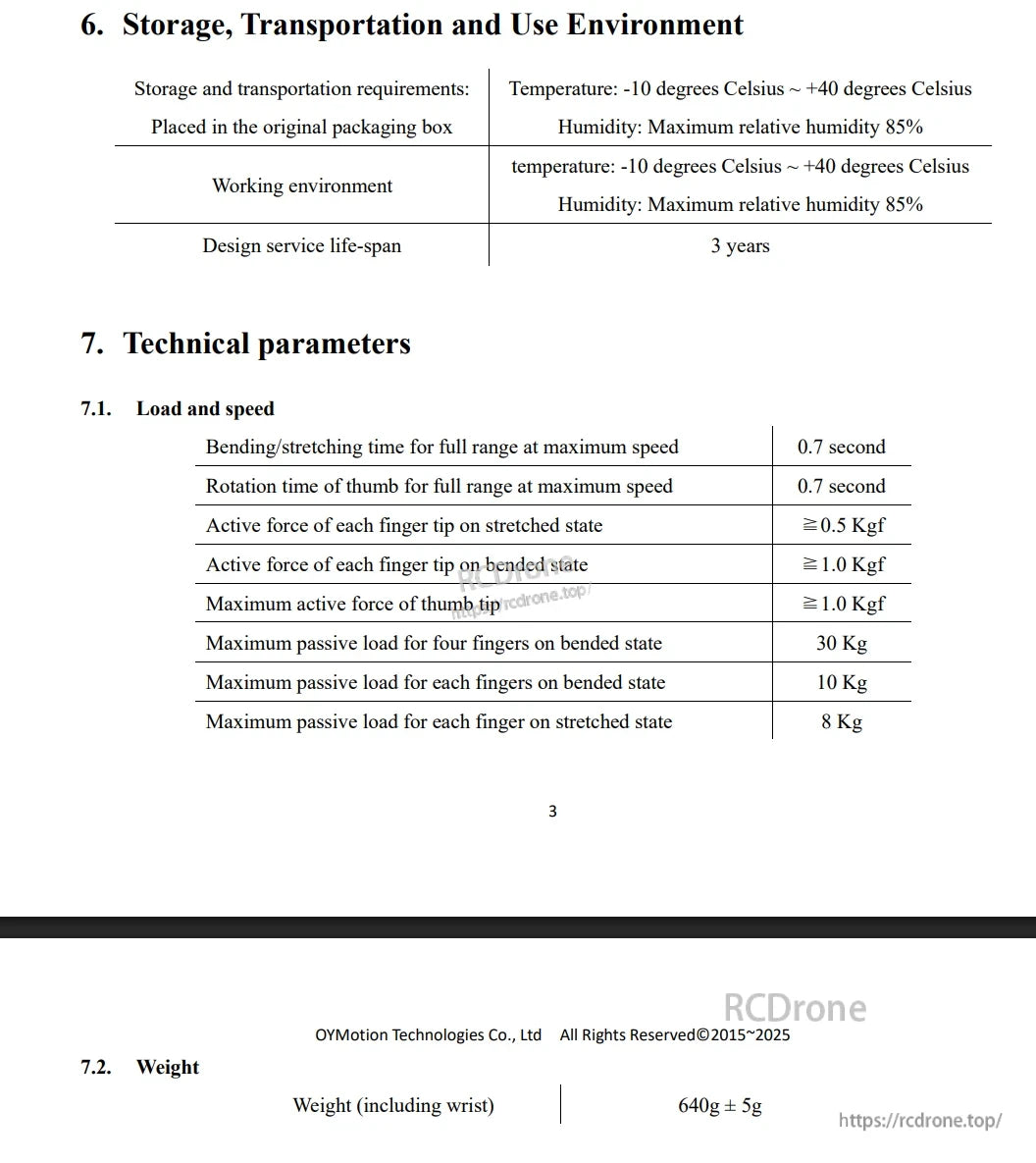
Роботизована рука OYMotion ROH-AP001 працює в діапазоні температур від -10°C до +40°C, максимальна вологість 85%. Термін служби дизайну: 3 роки. Вага: 640 г ±5 г. Активна сила пальців ≥0.5–1.0 Kgf; пасивне навантаження до 30 кг для чотирьох пальців.
Related Collections





