СПЕЦИФІКАЦІЇ 32-розрядного контролера польоту Pixhawk 2.4.8 PX4 PIX
Використання: Транспортні засоби та іграшки з дистанційним керуванням
Оновлення деталей/аксесуарів: Рамка
Інструменти: шліфовані
Технічні параметри: Значення 3
Периферійні пристрої/пристрої дистанційного керування: Пульт дистанційного керування
Рекомендований вік: 12+y,14+y
Запчастини та аксесуари RC: Контролери швидкості
Походження: Материковий Китай
Номер моделі: Pixhawk 2.4.8
Матеріал: Метал
Атрибути повного приводу: Мотори
Для типу транспортного засобу: Літаки
Назва торгової марки: Readytosky
ReadyToSky є професійним постачальником аксесуарів для модулів FPV RC. Якщо ви хочете дізнатися більше про варіанти оптової або масової закупівлі, будь ласка, зв’яжіться з нами.
Функції:
Pixhawk 2.4.8 підтримує останню офіційну мікропрограму ardupilot і мікропрограму PX4.
1. Удосконалені 32-розрядні високопродуктивні процесори ARM CortexM4 (флеш-пам’ять 2 МБ), можуть працювати з операційною системою реального часу NuttX RTOS;
2. 14 ШІМ/сервовихід;
3. Інтерфейс шини (UART, I2C, SPI, CAN);
4. Інтегроване резервне живлення та резервний контролер виходять з ладу, основний контролер перемикається на резервний контроль безпечно;
5. Забезпечити автоматичний і ручний режими;
6. Забезпечте надлишкове введення живлення та відновлення після відмови;
7. Багатоколірні світлодіодні ліхтарі;
8. Забезпечити інтерфейс багатотонального зумера
9. Micro SD запис даних польоту;
Технічні характеристики:
Інтерфейс
1,5 високовольтний сумісний UART 1, 2 з апаратним керуванням потоком
2. 2 МОЖЕ
3.Spektrum DSM / DSM2 / DSM-X вхід, сумісний із супутниковим приймачем
4.Входи та виходи, сумісні з Futaba SBUS
5. Вхідний сигнал PPM
6.RSSI (ШІМ або напруга) вхід
7.I2C
8.SPI
Вхід 9.3.3 і 6.6VADC
10. Зовнішній інтерфейс MICRO USB
OLED-дисплей OSD Pixhawk для Pixhawk 2.4.8 PIX PX4 Flight Control Дисплей польоту Статус польоту підключено до інтерфейсу I2C
Він підходить для керування польотом Pixhawk тощо та використовується для відображення інформації про статус літака. Цей модуль підключено до інтерфейсу I2C Pixhawk
Примітка: щоб оновити мікропрограму дисплея до версії 3.5 або новішої, установіть для NTF_DISPLAY_TYPE значення 1 у Massion Planner і перезапустіть Pixhawk.
ЯК використовувати модуль WIFI для PIXHAWK?
1.Як підключитися?
використовуйте лінію 6P для підключення до контролера польоту pixhawk.
Через різні мікропрограми, деякі мікропрограми можуть використовувати два порти, деякі мікропрограми можуть використовувати лише один із портів. Отже, знайдіть один із доступних портів для підключення.
ЯКЩО ви використовуєте прошивку PX4, можна використовувати лише TELEM1, а не TELEM2.
Для мікропрограми Ardupilot рекомендується використовувати порт TELEM2. Або знайдіть один із доступних портів для підключення.
Для мікропрограми PX4 слід використовувати порт TELEM1.
2.Як використовувати?
Зверніть увагу: під час використання радіотелеметричного підключення Wi-Fi необхідно використовувати модуль живлення 3DR або ESC 5 В для живлення пульта керування польотом. USB не можна вставити, оскільки пріоритет USB вищий, ніж радіотелеметрія. Якщо USB-кабель під’єднано, його не можна використовувати для радіотелеметричної передачі.
Точка доступу Wi-Fi називається Drone, тому підключіться до цієї точки доступу по телефону або комп’ютеру, пароль – 12345678.
Примітка. Деякі пристрої (наприклад, деякі системи IOS iphone) не можуть отримати ip автоматично, вам слід встановити вручну.
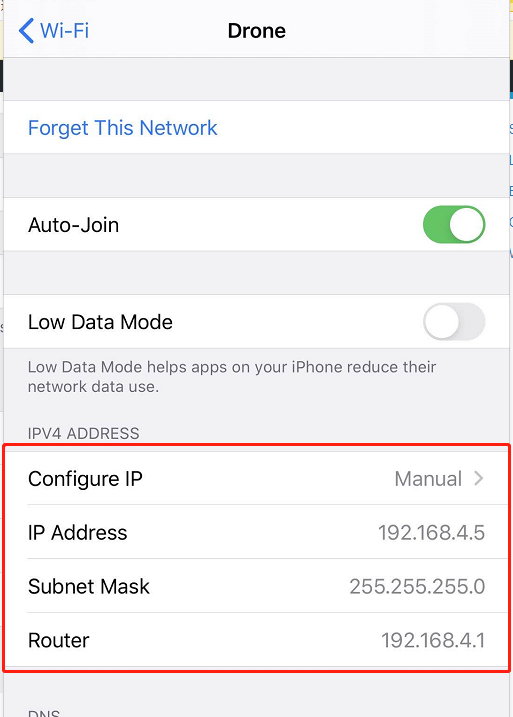
Установіть параметр «Налаштувати IP» як «Вручну». Встановіть IP-адресу як «192.168.4.5» або іншу, але не можна встановлювати як «192.168.4.1», останнє число не може перевищувати 254. Встановіть маску підмережі як «255.255.255.0» (слід встановити це значення, не може інше). Встановіть маршрутизатор як «192.168.4.1» (потрібно встановити це значення, не можна інше)
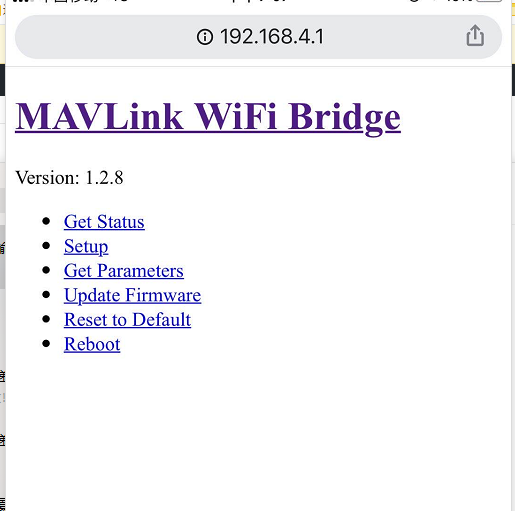
Якщо ваш пристрій успішно під’єднається до цієї точки доступу, ви зможете використовувати браузер для перегляду http://192.168.4.1 , ви можете змінити параметр.
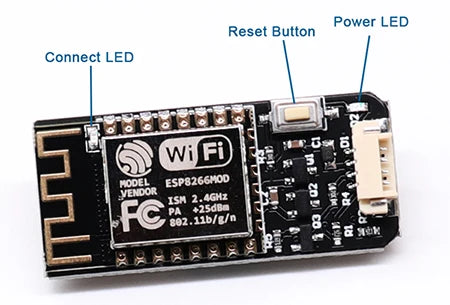
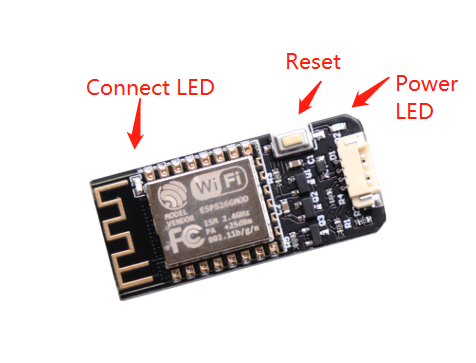
Зверніть увагу, що ця кнопка є кнопкою скидання, а не кнопкою перезавантаження. Якщо натиснути цю кнопку, усі параметри будуть встановлені за замовчуванням, якщо ви зміните деякі параметри.
Індикатор живлення: під час увімкнення світиться червоний світлодіод.
Світлодіодний індикатор підключення: якщо з’єднатися з наземним контролем (наприклад, Mission Planner або Qgroundcontrol) успішно, синій світлодіод блимає. коли від'єднується від наземного керування, світиться синій світлодіод.
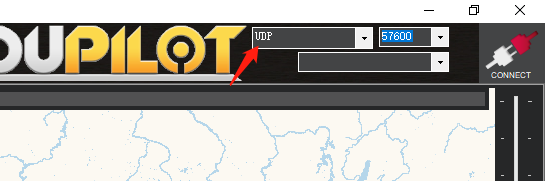
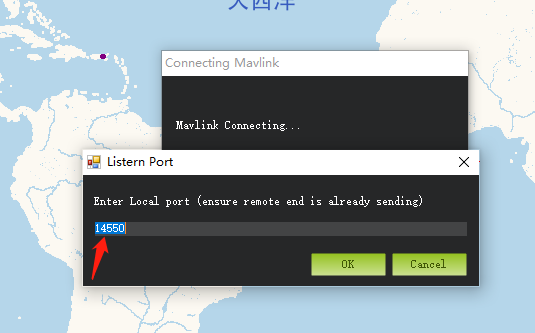
1.Як використовувати для планувальника місій?
По-перше, успішно підключіть свій ПК до точки доступу Drone . Виберіть UDP. Потім натисніть кнопку «Підключити», скористайтеся портом 14550. Натисніть «Ok». Немає необхідності вибирати швидкість передачі даних. Швидкість передачі даних модуля Wi-Fi за умовчанням становить 57600. Але також може працювати 115200 або інший.
2.Як використовувати для телефону
Для Android: завантажте qgroundcontrol (лише для pixhawk, а не для APM)
звідси,http://qgroundcontrol.com/downloads/
Завантажте DroidPlanner тут,https://github.com/DroidPlanner/Tower/releases
Для iphone(IOS): знайдіть qgroundcontrol у магазині програм.
qgroundcontrol (лише для pixhawk, а не для APM) може підключатися автоматично, DroidPlanner має вибрати порт «UDP» і «14550» перед підключенням до groundcontrol.
WIFI V3.0 використовує 32-розрядний процесор, підтримує TCP і UDP
Веб-сайт WIFI V3.0 DroneBridge
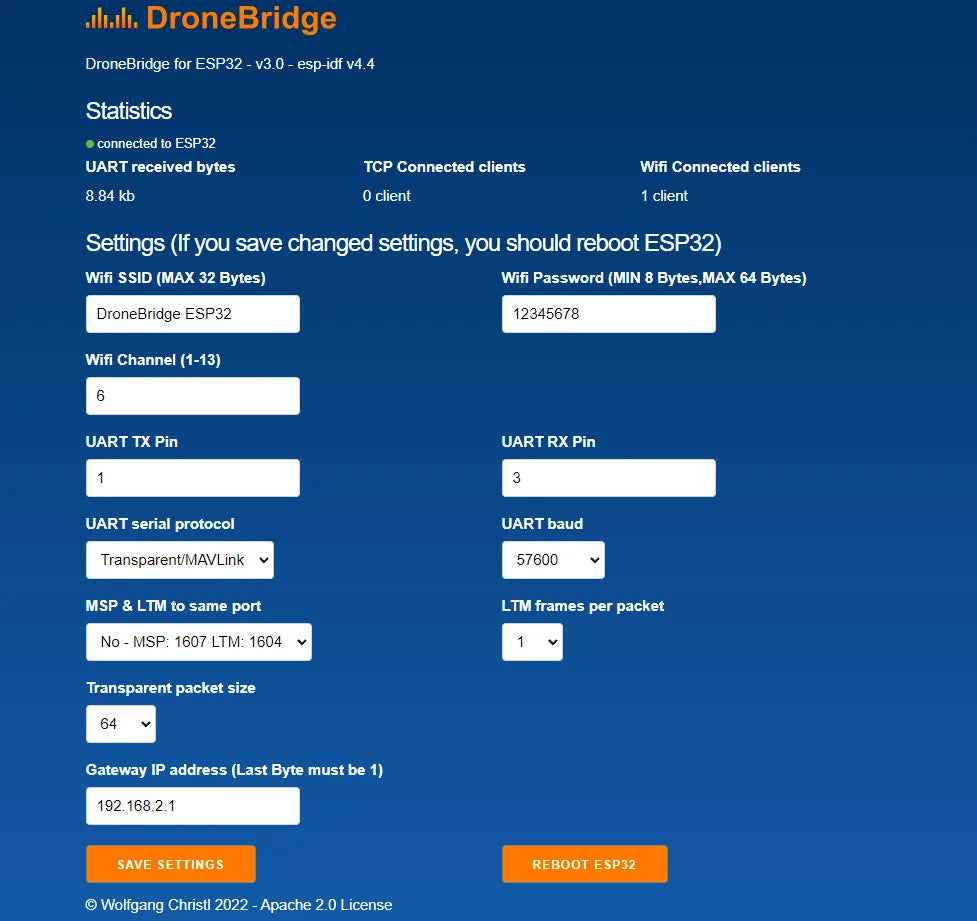
улул; DroneBridge для ESP32 v3.0 esp idf v4.4 Статистика підключено до ESP 32 UART отримані байти TCP Підключені клієнти Wifi Пароль (МІН. 8 байт, МАКС. 64 байти) якщо ви збережете змінені налаштування, вам слід перезавантажити ESP33.
( надішліть на свій вибір)

Pixhawk 2.4.8 FC + 4G TF Card + MBN GPS GPS Holder+ OSD + Power Module Shock Absorber I2C PPM RGB Safety Buzzer Wifi Telemtry Wires Ontk 'GPs Module PPM 1'

Пакет включає: Pixhawk 2.4.8 контролер польоту, карта 4G TF, амортизатор, модуль I2C, модуль PPM, модуль RGB, OLED-дисплей, кнопка безпеки зі зумером та дроти для всіх компонентів.
У комплект входить: Pixhawk 2.4. 8 контролерів польоту, карта 4G TF, модуль MBN GPS, тримач GPS, амортизатор, кнопка безпеки I2C, дроти зумера та додатковий телеметричний модуль для бездротової передачі даних.

Пакет включає: Pixhawk Контролер польоту 2.4.8, карта 4G TF, амортизатор, OLED-дисплей, модуль I²C, модуль PPM (модуляція імпульсного положення), кнопка безпеки зі зумером і дроти.

Цей політ Pixhawk 2.4.8 контролер поставляється з картою 4G TF, кнопкою безпеки, зумером і проводами для додаткових виходів. Він також оснащений модулем TELEM з двома входами живлення, послідовним портом і каналами АЦП (аналогово-цифровий перетворювач). Крім того, він має можливості GPS і потребує живлення для роботи.

VCC, GPS і калібрування SD-карти потрібні в режимі «Стабілізований» із напругою батареї 11,32 В. Крім того, немає даних GPS. Попереднє встановлення на охорону подано, і EKF (розширений фільтр Калмана) увімкнено.