




ROBOTERA XHAND 1 Роборука - 12 ступенів свободи, тактильні кінчики пальців 270°, захват 80Н, підйом 25 кг, EtherCAT/RS485, підтримка ROS
ROBOTERA XHAND 1 Роборука - 12 ступенів свободи, тактильні кінчики пальців 270°, захват 80Н, підйом 25 кг, EtherCAT/RS485, підтримка ROS
ROBOTERA
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
ROBOTERA XHAND 1 - це роботизована рука з п'ятьма пальцями, яка має повністю прямий привід з суглобними модулями та 12 активними ступенями свободи. Рука має розмір людської руки (191 мм x 94 мм x 47 мм) і призначена для декстерного маніпулювання з високою роздільною здатністю тактильного сприйняття, надійною силою захоплення та зручними інтерфейсами для досліджень у галузі робототехніки та інтеграції.
Ключові особливості
- Повна архітектура прямого приводу з інтегрованими модулями суглобів з приводом від шестерні та контролем сили (3 в великому пальці; 9 в інших чотирьох пальцях).
- 12 повністю активних ступенів свободи; бічний рух вказівного пальця +/-15° для складного маніпулювання в руці.
- Висока продуктивність захоплення: сила на кінчику пальця 15N; максимальна сила захоплення 80N; максимальна вага захоплення до 25 кг (долоня вгору) і 16 кг (долоня вліво).
- Високошвидкісне виконання з підтримкою >2Гц повторення відкриття/закриття; продемонстроване клацання пальців до 10 CPS (клацань за секунду).
- 270° дотикова покриття з п'ятьма тривимірними тактильними сенсорами; роздільна здатність для всієї руки 12x10 на палець x 5.
- Тривимірне вимірювання сили, включаючи тангенціальні сили (X та Y); точність повторного позиціонування на кінчику пальця +/-0.20 мм.
- Зворотна дія з демпфуванням <= 0.1 Нм; управління силою по замкнутому контурі та управління силою-позицією для сумісної взаємодії.
- Зручне підключення для розробників: EtherCAT та RS485 (USB); сумісний з ROS1/ROS2, Ubuntu (Linux), архітектурами x86 та ARM, TwinCAT та загальними роботизованими руками (включаючи xARM, Realman, UR).
- Тривалість роботи розрахована на 1,000,000 циклів захоплення без навантаження; робоча температура -20°C ~ 60°C.
Для запитів, підтримки інтеграції або оптових закупівель, звертайтеся [email protected] or відвідайте https://rcdrone.top/.
Специфікації
| Параметр | Значення |
|---|---|
| Вага | 1100 г |
| Розміри (Д x Ш x В) | 191 мм x 94 мм x 47 мм (Розмір дорослої руки) |
| Активні ступені свободи (Всього) | 12 |
| Пасивні ступені свободи (Всього) | 0 |
| Розподіл ступенів свободи | Великий палець x 3; Вказівний палець x 3; Середній палець x 2; Безіменний палець x 2; Мізинець x 2 |
| Активація/Передача великого пальця | 3 модулі з керуванням силою на основі зубчастого приводу |
| Активація/Передача чотирьох пальців | 9 модулів з керуванням силою на основі зубчастого приводу |
| Конфігурація кінчиків пальців | Круглі або закруглені кінчики пальців |
| Бічний оберт | -15°~+15° (Вказівний) |
| Точність позиціонування повторення на кінчиках пальців | +/− 0.20 мм |
| Режими управління | Контроль позиції (низьке демпфування/високе демпфування), контроль сили в контурі струму, контроль сили-позиції |
| Сила на кінчику пальця | 15N |
| Максимальна сила захоплення (вся рука) | 80N |
| Максимальна вага захоплення (долоня вліво) | 16 кг |
| Максимальна вага захоплення (долоня вгору) | 25 кг |
| Найбільше протистояння великого пальця | Маленький мізинець |
| Швидкість повторення відкриття/закриття | >2Гц |
| Демпфування зворотного приводу (можливий зворотний привід) | <= 0.1 Nm |
| Тактильне покриття | 270° п'ятипальцеве охоплення кінчиками пальців |
| Кількість тактильних датчиків | П'ять 270° тривимірних охоплюючих тактильних масивних датчиків на п'яти кінчиках пальців |
| Тактильна роздільна здатність (вся рука) | 12x10 (270° охоплення на кінчик пальця) x 5 |
| Розміри тактильного сприйняття | Тривимірне сприйняття сили (включаючи тангенціальні сили X та Y) |
| Частота управління всією рукою | 83Гц |
| Швидкість зв'язку | EtherCAT: 100МГц; RS485: 3МГц |
| Параметри сприйняття | Кінчики пальців: 120 тривимірних профільних сил; Суглоби: положення, швидкість, температура, струм (момент) |
| Параметри управління | Позиція суглоба; момент сили суглоба; коефіцієнт жорсткості суглоба; коефіцієнт демпфування суглоба |
| Цикли захоплення без навантаження | 1,000,000 циклів |
| Діапазон робочих температур | -20°C ~ 60°C |
| Робоча напруга | 24V ~ 72V |
| Статичний струм | 0.15A @48V, 7W |
| Максимальний струм | 2.5A @48V, 120W |
| Комунікаційний інтерфейс | RS485 (USB), EtherCAT |
Застосування
- Телепереміщення: підтримує MR та телепереміщення з рукавичками; Vision Pro телепереміщення; Manus Gloves; Pico/Meta Quest.
- Інтеграція роботизованої руки та гуманоїда: сумісний з xARM, Realman, UR та іншими роботизованими руками.
- Дослідження та моделювання: точний URDF, моделювання тактильного сприйняття; підходить для навчання з підкріпленням з Isaac Gym та Mujoco.
- Взаємодія людина-машина та управління людськими інструментами з контрольованим зусиллям.
Посібники
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
Деталі

ROBOTERA XHAND1 роботизована рука з повним прямим приводом, що пропонує справжню свободу та розвинену спритність.

XHAND1 від ROBOTERA: гуманоїдна п'ятипала рука з 12 ступенями свободи, 270° тактильних сенсорів на кінчику пальця, силою захоплення 80N, вантажопідйомністю 25кг. Розроблена для складних завдань та роботи з інструментами.

XHAND 1: Перша спритна рука з модулями прямого приводу на кожен суглоб. Має потужні бездротові мотори, редуктори з низьким демпфуванням, прецизійні енкодери та самостійно розроблені інтегровані модулі суглобів для розвиненої роботизованої маніпуляції.
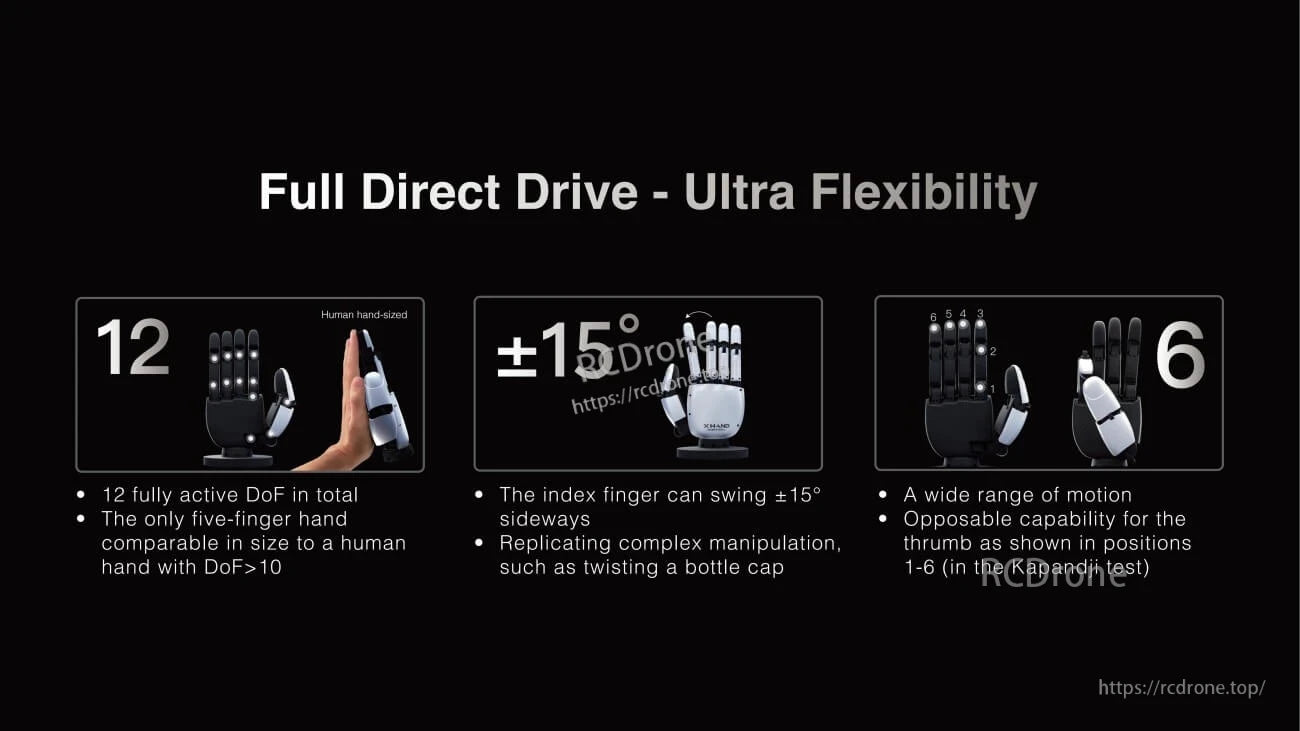
ROBOTERA XHAND 1 - це ультрагнучка, рука розміру людини з 12 активними ступенями свободи. Її вказівний палець коливається на ±15° вбік для складних завдань, а великий палець пропонує шість протилежних позицій для універсальної маніпуляції.

ROBOTERA XHAND 1: навантаження 25 кг, сила захвату 80 Н, повний прямий привід, перевершує подібні рішення на основі зв'язок/сухожиль.

Роботизована рука з повним прямим приводом досягає 10 CPS з швидкістю, що приводиться в дію шестернями, моментом більше 1 Нм, перевершуючи системи зв'язок і сухожиль для покращеної ігрової продуктивності.

ROBOTERA XHAND 1 має сенсори на кінчиках пальців з кутом огляду 270° з >100 точками та точністю 0.05 Н для 3D сили, тактильного та температурного чуття, що забезпечує відмінну продуктивність захвату.
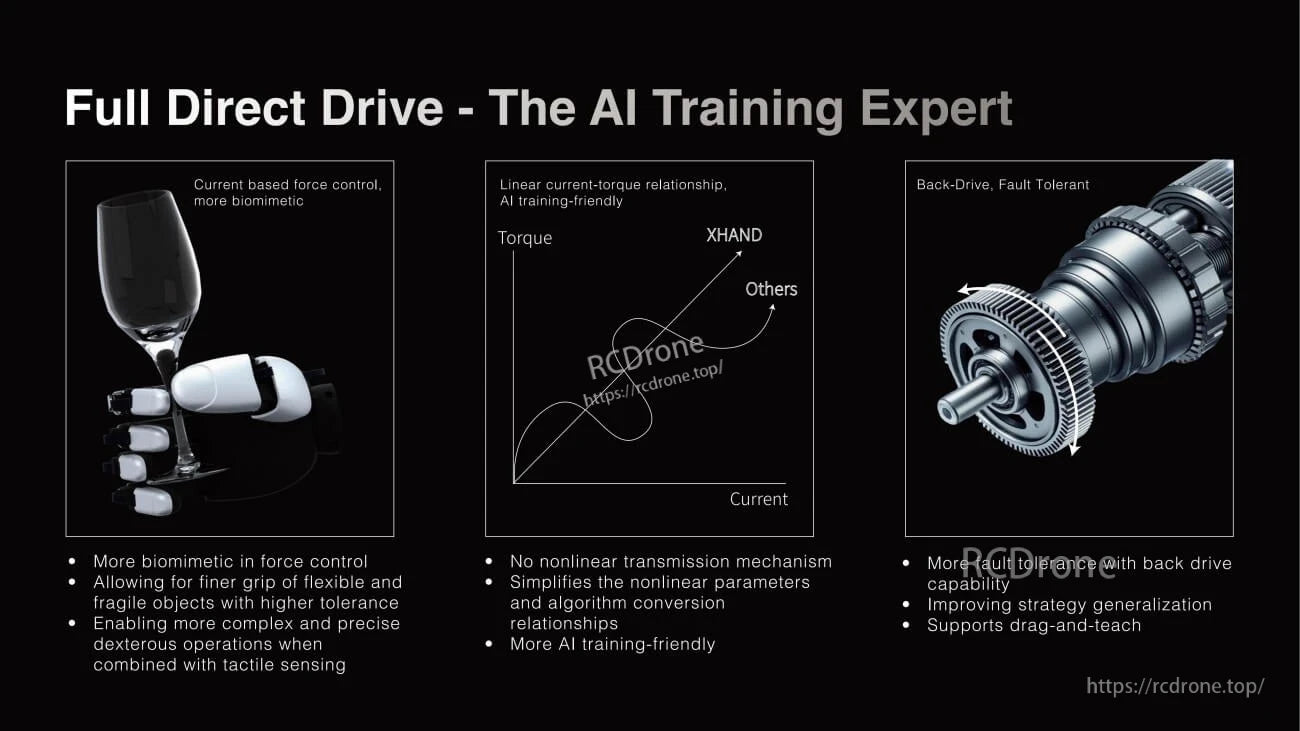
ROBOTERA XHAND 1 пропонує біоміметичне управління силою, лінійний відгук моменту-струму для навчання ШІ та стійкість до зворотного приводу — що дозволяє точну обробку, спрощені алгоритми, підтримку перетягування та навчання, а також покращену генералізацію стратегій.
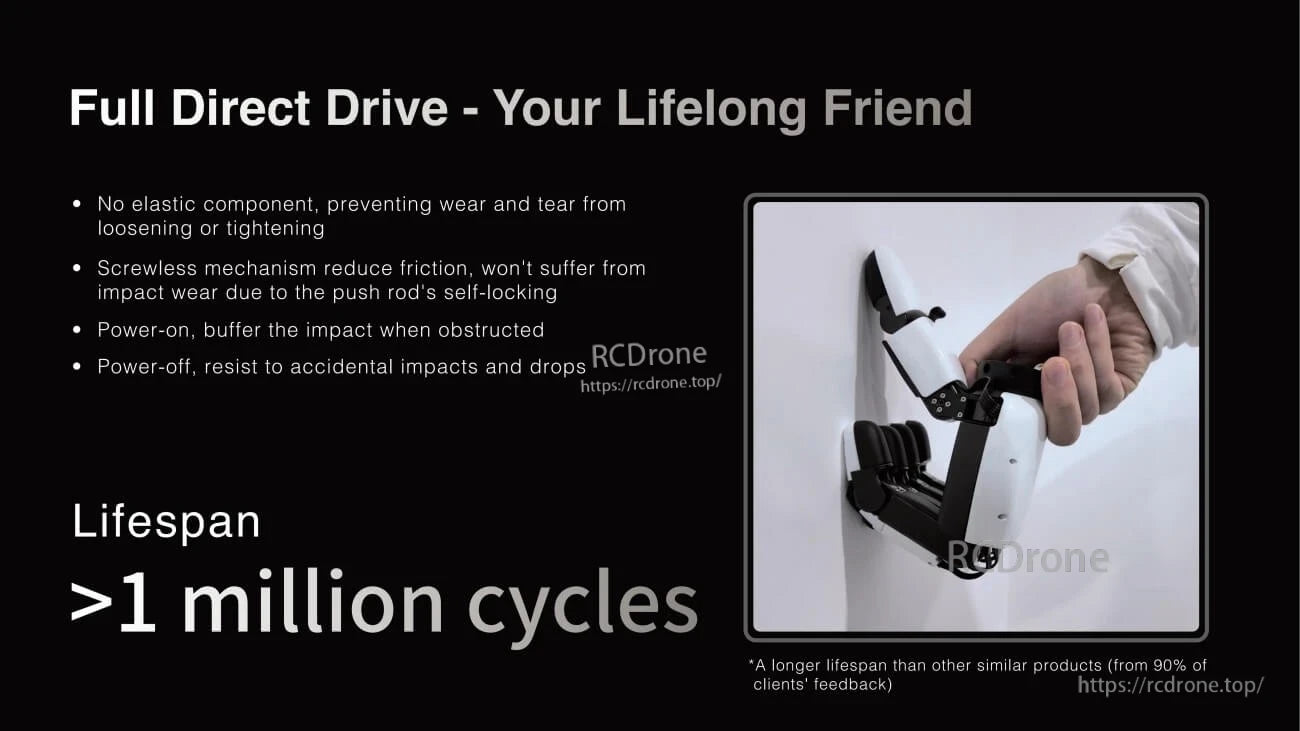
Повністю прямий привід роботизованої руки забезпечує довговічність без еластичних частин або гвинтів, амортизацію ударів під час роботи, стійкість до падінь у вимкненому стані та термін служби, що перевищує один мільйон циклів — перевершуючи подібні продукти за відгуками клієнтів.

ROBOTERA XHAND 1 підтримує телепереміщення MR та рукавичок, сумісний з ROS1/ROS2 та Ubuntu на x64/ARM. Має EtherCAT/TwinCAT/RS485 для інтеграції з xARM, Realman, UR роботизованими руками. Пропонує точне моделювання URDF та симуляцію тактильного сприйняття. Розроблений для дружніх до розробників робототехнічних застосувань з крос-платформенною гнучкістю та розширеними протоколами управління.
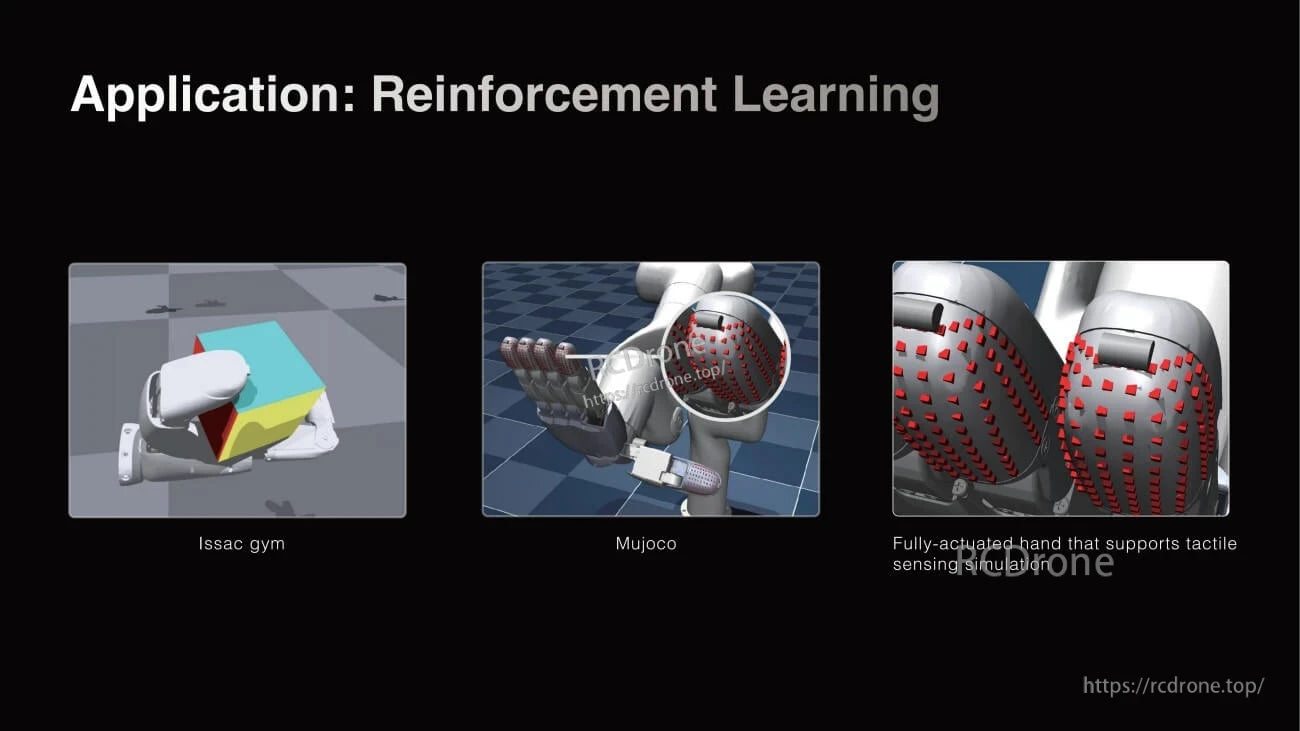
Застосування навчання з підкріпленням: Issac gym, Mujoco та повністю активована рука з симуляцією тактильного сприйняття для розширеного роботизованого контролю та навчальних середовищ.
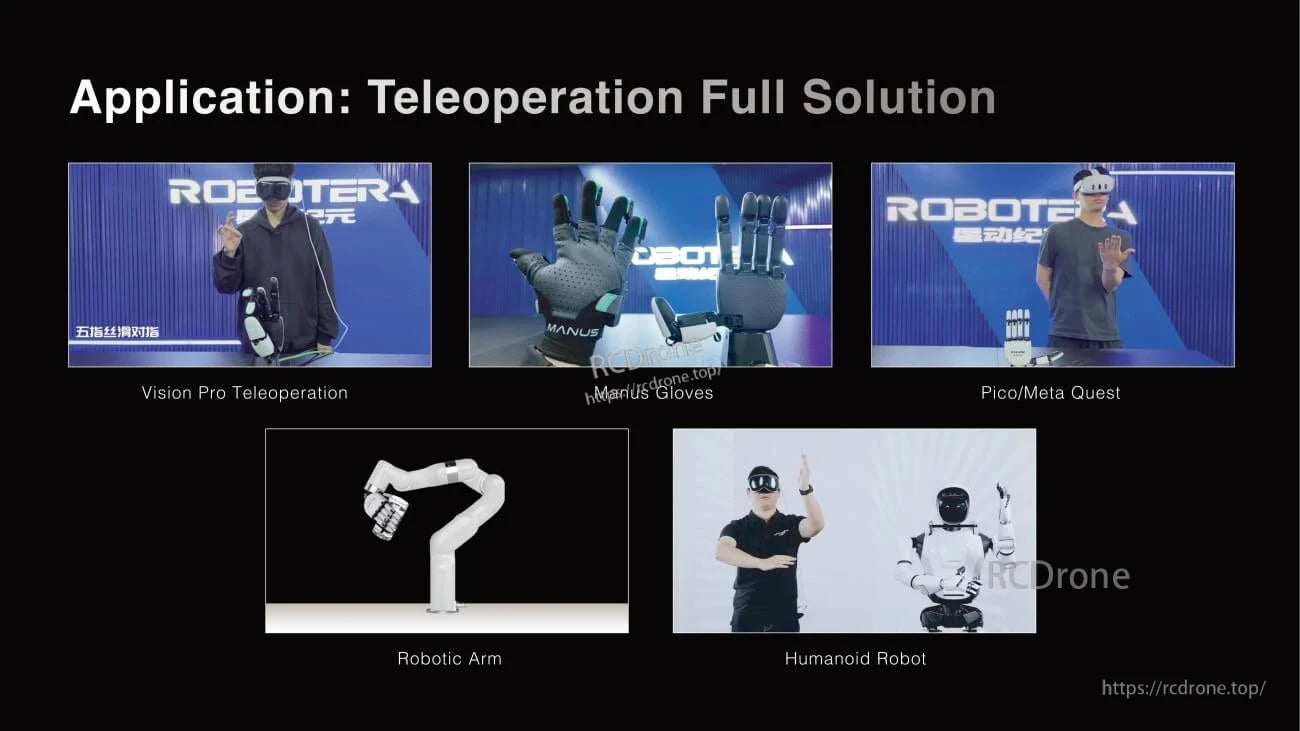
Повне рішення для телеправління з Vision Pro, рукавицями Manus, Pico/Meta Quest, роботизованою рукою та гуманоїдним роботом для просунутого дистанційного керування.
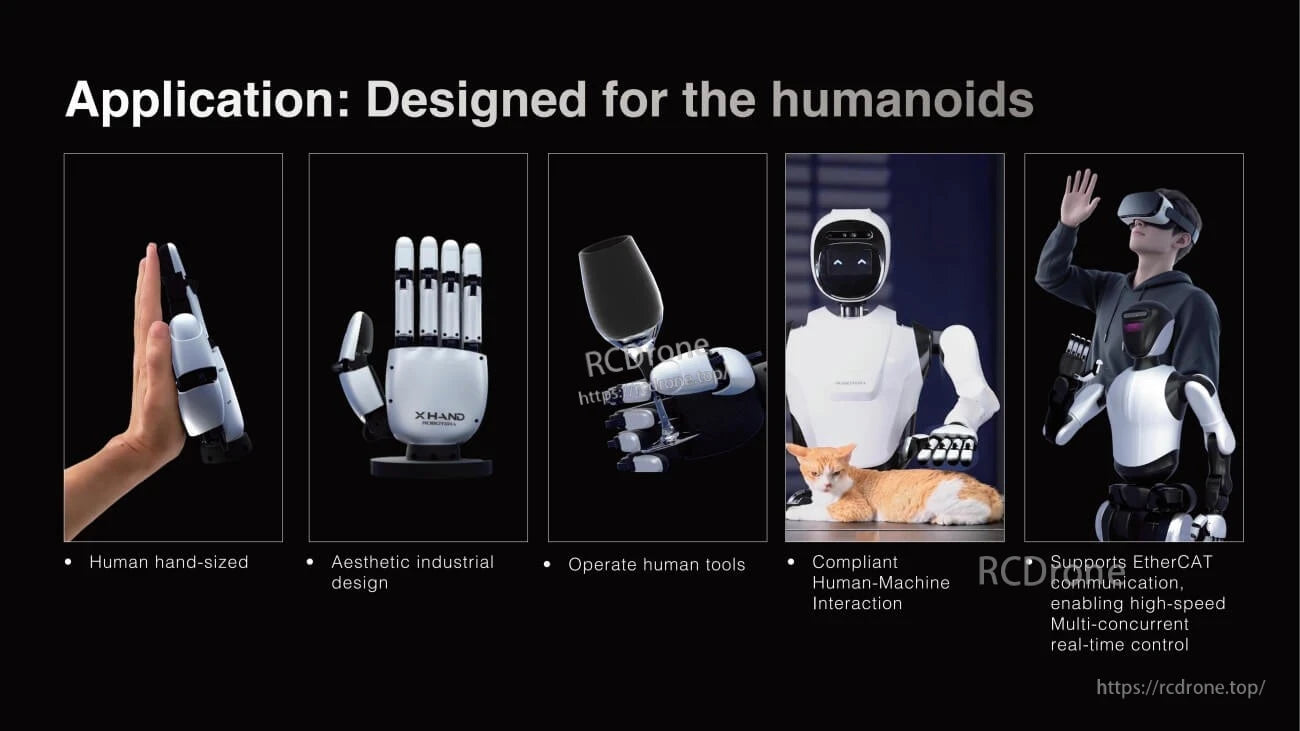
Рука робота розміру людини з естетичним дизайном, працює з інструментами, забезпечує сумісну взаємодію, підтримує EtherCAT для реального часу.
Related Collections




