



Програмований дрон S2-F290 - Pixwawk з відкритим вихідним кодом ROS SLAM AI Secondary Development Industrial Level for Drone Challenge
Програмований дрон S2-F290 - Pixwawk з відкритим вихідним кодом ROS SLAM AI Secondary Development Industrial Level for Drone Challenge
RCDrone
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
The Програмований дрон S2-F290 є високопродуктивним безпілотник промислового класу призначений для вторинної розробки та викликів безпілотників. За участю а вантажопідйомність 2400 г, а Акумулятор 6S 6000mAh, і a максимальна дистанція контролю 10 км, це забезпечує точність з Точність позиціонування GPS ≈1–2м і вітростійкість 3–4 рівня. Працює на Контролер польоту Pixhawk 2.4.8 з технологія ROS SLAM з відкритим кодом, дрон підтримує розширені функції, такі як 3D-картографування LiDAR, розпізнавання об’єктів на основі YOLO та політ у пласті. Його Карбоновий каркас 3 мм забезпечує виняткову довговічність і стабільність, перевірено в екстремальних умовах. Платформа має широкі можливості налаштування та пропонує такі функції, як підтримка наземних станцій QGC китайською та англійською мовами, можливість модульного розширення та вичерпні навчальні посібники, що робить її ідеальною для досліджень, конкуренції та розробки програм.
Специфікація
Літак
| Параметр | Специфікація |
|---|---|
| Ім'я | Програмований дрон S2-F290 |
| Вага корисного навантаження | 2400г |
| Модель | S2-F290 |
| Точність позиціонування GPS | ≈1–2м |
| колісна база | 290 мм |
| Максимальна злітна вага | 3190г |
| Акумулятор | Стандартний акумулятор 6S на 6000 мАг |
| Відстань контролю | 10 км (рекомендовано в межах 1000 м) |
| Опір вітру | Рівень 3–4 |
| Операційне середовище | В приміщенні/на вулиці |
| Результати тесту на витривалість | Подробиці |
|---|---|
| Пропелери | 7-дюймовий |
| Ємність акумулятора | 6S 6000mAh (5300mAh використано) |
| Навколишнє середовище | Безвітряний |
| Час польоту | 11 хвилин 30 секунд |
Контролер польотів
| компонент | Специфікація |
|---|---|
| Процесор FMU | STM32H743 Cortex-M7, 480 МГц, 2 МБ Flash, 1 МБ SRAM |
| IO процесор | STM32F103 Cortex-M3, 72 МГц, 64 КБ SRAM |
| Датчики | Акселерометр/гіроскоп: ICM-42688-P |
| Акселерометр/гіроскоп: BMI055 | |
| Магнітометр: IST8310 | |
| Барометр: MS5611 | |
| Номінальна напруга | Максимальна вхідна напруга: 6 В |
| Вхід живлення USB: 4,75-5,25 В | |
| Серво вхід: 0-36 В | |
| Номінальний струм | Телеметрія 1 Максимальний вихідний струм: 1 А |
| Комбінований струм для інших портів: 1 А | |
| Механічні дані | Розміри: 53,3 × 39 × 16,2 мм |
| Вага: 39.2г | |
| Порти | - 14 виходів ШІМ (8 від IO, 6 від FMU) |
| - 2 послідовних порти загального призначення | |
| - 2 порти GPS | |
| - 1 порт I2C | |
| - 2 порти CAN | |
| - RC вхід для Spectrum/DSM, S.BUS, CPPM тощо. | |
| - Вхідний порт живлення | |
| Інші функції | Робоча температура: -40–85°C |
Бортовий комп'ютер
| компонент | Специфікація |
|---|---|
| Обчислювальна потужність | 40 ТОПІВ |
| GPU | 32 тензорних ядра з 1024-ядерним графічним процесором NVIDIA Ampere |
| ЦП | 6-ядерний Arm Cortex-A78AE v8.2 64-біт, 1,5 ГГц |
| Оперативна пам'ять | 8 ГБ 128-розрядний LPDDR5 68 ГБ/с |
| Зберігання | SD-карта або зовнішній NVMe |
| Максимальна частота ЦП | 1,5 ГГц |
Пульт дистанційного керування
| компонент | Специфікація |
|---|---|
| Робоча напруга | 4,2 В |
| Робочий струм | 100 мА |
| Діапазон частот | 2,4–2,483 ГГц |
| вага | 525 г |
| Розміри | 130 × 150 × 20 мм |
| Термін служби батареї | 20 годин |
| Порт зарядки | МІКРО-USB |
| Діапазон контролю | 7 км |
GPS
| компонент | Специфікація |
|---|---|
| Супутниковий приймач | UBLOX-M9, 92 канали |
| Електронний компас | QMC5883L |
| Супутникові системи | GPS L1 C/A, ГЛОНАСС L1OF, BeiDou B1, Galileo E1 |
| Супутникові канали | 32 |
| Швидкість оновлення | 25 Гц |
| Точність позиціонування | 1,5 м CEP (ідеальне середовище) |
| Час запуску | Холодний старт: 24 с, гарячий старт: 1 с |
| Розміри | 25 × 25 × 8 мм |
| вага | 12г |
Акумулятор
| компонент | Специфікація |
|---|---|
| Тип роз'єму | XT60 |
| Рекомендований струм заряду | 3–5А |
| Ємність акумулятора | 6000 мАг |
| Номінальна напруга | 22.2В |
| Швидкість розряду | 75C |
| Розміри | 50 × 44 × 158 мм |
| вага | 816г |
ЛіДАР
| компонент | Специфікація |
|---|---|
| Довжина хвилі лазера | 905 нм |
| Діапазон | 40 м при коефіцієнті відбиття 10%, 70 м при коефіцієнті відбиття 80% |
| Мінімальна зона виявлення | 0,1м |
| Поле зору | По горизонталі: 360°, по вертикалі: від -7° до 52° |
| Вихід хмари точок | 200 000 точок/с |
| Ставка балів | 10 Гц |
| Рівень захисту | IP67 |
| потужність | 6,5 Вт (25°C навколишнього середовища) |
| Діапазон напруги | 9–27 В постійного струму |
| Розміри | 65 × 65 × 60 мм |
| вага | 265 г |
Камера глибини
| компонент | Специфікація |
|---|---|
| Технологія глибини | Подвійний інфрачервоний порт |
| Глибина кута огляду | 87° × 58° (по горизонталі × по вертикалі) |
| Роздільна здатність по глибині | 1280 × 720 |
| Точність глибини | <2% протягом 2 хв |
| Глибина Частота кадрів | 90 кадрів в секунду |
| Діапазон глибин | 0,3–3м |
| Розміри | 90 × 25 × 25 мм |
| Операційне середовище | В приміщенні/на вулиці |
Камера з одним об'єктивом
| компонент | Специфікація |
|---|---|
| Максимальна роздільна здатність | 2 МП (1920 × 1080) |
| Максимальна частота кадрів | 30 кадрів/с |
| Поле зору | ~90° |
| Довжина кабелю | ~1.5м |
| Розміри | 35 × 35 × 30 мм |
Таблиця функцій
| соборування | Базова конфігурація | Додатково D435 | Додатковий модуль D435 + 4G |
|---|---|---|---|
| Тримання висоти, зависання, повернення додому | ✔ | ✔ | ✔ |
| Посадка, стабілізація, політ на точку | ✔ | ✔ | ✔ |
| Політ на дистанційному керуванні | ✔ | ✔ | ✔ |
| Зв'язок між польотним диспетчером і бортовим комп'ютером | ✔ | ✔ | ✔ |
| Розпізнавання QR-коду та посадка | ✔ | ✔ | ✔ |
| Розпізнавання та скидання об’єктів | ✔ | ✔ | ✔ |
| Одночасне картографування та уникнення перешкод | ✔ | ✔ | ✔ |
| Картографування та позиціонування 3D LiDAR | ✔ | ✔ | ✔ |
| Розпізнавання об'єктів на основі YOLO | ✘ | ✔ | ✔ |
| Розпізнавання та відстеження об'єктів | ✘ | ✔ | ✔ |
| Пульт дистанційного керування 4G | ✘ | ✘ | ✔ |
Пакет включає
Базова конфігурація
- рамка: Рама з вуглецевого волокна F290
- Двигуни: 4× Т-двигун F100 Kv1100
- ESC: 4× FlyFun T-rex 5 45A
- Пропелери: 4 × 7-дюймові трилопаті пропелери
- Контролер польотів: Pixhawk6mini
- Акумулятор: стандартна батарея 6S 6000mAh
- Зарядний пристрій: зарядний пристрій 6S
- Бортовий комп'ютер: Jetson Orin Nano 8G + модуль WIFI
- SSD: 256G
- ЛіДАР: Livox MID360
- Камера: 150° ширококутна USB-камера
- Пульт дистанційного керування: Cloud T10 (включає приймач даних)
Додаткова конфігурація: D435
Включає всі компоненти з Базова конфігурація, плюс:
- Подвійна камера: D435
Додаткова конфігурація: D435 + модуль 4G
Включає всі компоненти з Базовий Конфігурація, плюс:
- Подвійна камера: D435
- Модуль 4G
Подробиці
Програмований дрон S2-F290
- ✔ Технічна підтримка, безпроблемне післяпродажне обслуговування
- ✔ Надає приклади змагань, які можна налаштувати
- ✔ Китайська/англійська мобільна наземна станція
- ✔ Висока стабільність, висока продуктивність
- ✔ В приміщенні/на вулиці
S2-F290 — це передовий безпілотний літальний апарат, розроблений для гонок безпілотників, який спеціалізується на дослідженнях та інноваціях.Розроблений для інтеграції передових технологій і необмеженої творчості, він здатний адаптуватися до різноманітних складних середовищ, роблячи дослідження з повітря доступнішим і ефективнішим.
Цей дрон має компактну конструкцію з величезною потужністю. Він пропонує безліч прикладів змагань, що дозволяє користувачам швидко освоїти та оптимізувати його продуктивність. Оснащений спеціальною китайською/англійською мобільною наземною станцією, він значно підвищує зручність керування дроном. Крім того, він надає конкурентоспроможні пояснення вихідного коду та можливості налаштування, щоб гарантувати, що користувачі можуть досягти бажаних функціональних можливостей у найкоротший час, перевершуючи конкурентні сценарії.

Задоволення потреб у розвитку / конкуренції / дослідженнях
| Категорія | Подробиці |
|---|---|
| РОС Базові знання | - Пульт дистанційного керування |
| - Зв'язок між диспетчером польоту та бортовим комп'ютером | |
| Основні функції | - Планування маршруту |
| - Розпізнавання та позиціонування QR-коду | |
| - Автономне патрулювання поза бортом | |
| Розширені функції | - Розпізнавання QR-коду для посадки |
| - Розпізнавання та скидання об'єктів | |
| - Одночасне картографування та уникнення перешкод | |
| - 3D LiDAR картографування та позиціонування | |
| - Розпізнавання об'єктів на основі YOLO | |
| - Передача відео через Інтернет | |
| - Політ на відкритому повітрі | |
| - Спільне формування земля-повітря | |
| Додаткові функції камери D435 | - Візуальне позиціонування VINS |
| - Розпізнавання та відстеження об'єктів на основі YOLO | |
| Додаткові функції зв'язку 4G | - Пульт дистанційного керування 4G |
Автономне уникнення перешкод, комплексна гарантія безпеки
Використовуючи 3D LiDAR для автономного уникнення перешкод, дрон поєднує глобальне планування маршруту з локальним динамічним уникненням перешкод, щоб точно виявляти перешкоди з усіх боків. Він підтримує автоматичну зупинку, а також безперервний політ, що дозволяє гнучко уникати об’єктів уздовж траєкторії польоту, забезпечуючи більш безпечний політ.

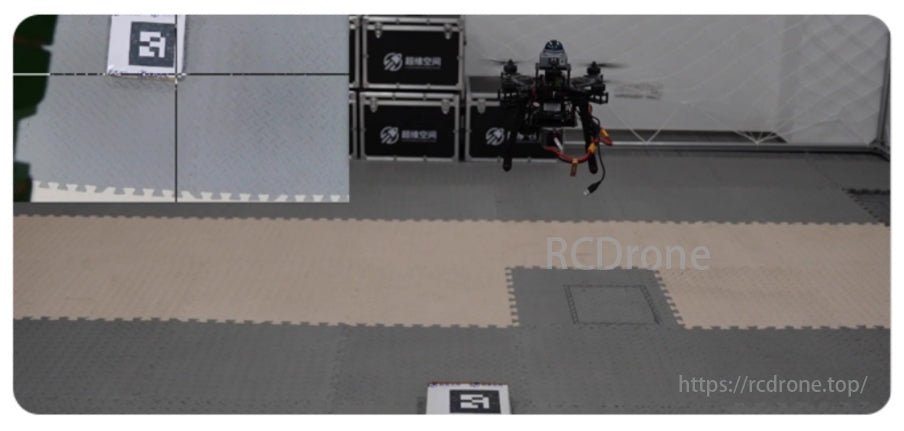
Розпізнавання та посадка QR-коду
Дрон активує камеру та модуль розпізнавання QR-коду, щоб отримати позиційну інформацію QR-коду в реальному часі. Під час спуску дрон динамічно коригує своє положення, забезпечуючи точне вирівнювання з полем зору камери перед тим, як приземлитися.
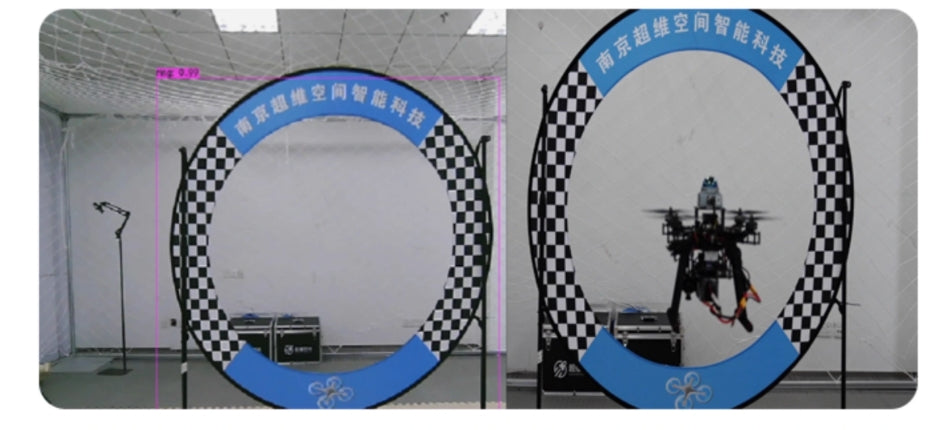
Розпізнавання об'єктів YOLO
Дрон використовує YOLOv8 для розпізнавання об’єктів, отримуючи позиційну інформацію круглої рамки в режимі реального часу. Він самостійно регулює своє положення та переміщається по круглій рамці.
Політ на відкритому повітрі
Дрон використовує технологію формування зграї, що дозволяє скоординовано керувати декількома безпілотниками для досягнення групового польоту.Використовуючи розширені алгоритми зв’язку та спільного керування, він сприяє спілкуванню та обміну інформацією в режимі реального часу між безпілотниками, синхронізуючи їхні рухи та позиції для формування щільного строю.

Земля-повітря колаборативне формування
Ця платформа підтримує спільне формування наземних і повітряних дронів. Використовуючи локальну мережу з топологічними структурами для взаємозв’язку пристроїв, він використовує зв’язок UDP і спеціальні протоколи для забезпечення високошвидкісного та стабільного зв’язку. Завдяки PID-регулюванню він забезпечує синхронне слідування між основним безпілотником і кількома підпорядкованими дронами, забезпечуючи стабільність формування та ефективність роботи.

Приклад конкурсу
Надає ексклюзивні сценарії змагань із покроковими інструкціями, що дозволяє учасникам легко адаптуватися до різних видів змагань.



Особливості програмованого дрона S2-F290
Висока ціна-ефективність
- Призначений для початківців, щоб скоротити час навчання та полегшити освоєння керування дроном.
- Ціна доступна, що робить його ідеальним навчальним дроном для студентів та ентузіастів.
Висока стабільність
- Випробувано в різних екстремальних умовах протягом трьох років.
- Оснащений рамою з вуглецевого волокна товщиною 3 мм для підвищеної міцності та стабільності.
- Дозволяє користувачам отримати визнання під час першого змагання.
Можливість розширення
- Підтримує розширене налаштування для різноманітних програм.
- Сумісність з різними компонентами розширення для постійного покращення продуктивності та функціональності дрона.
Безтурботне післяпродажне обслуговування
- Професійна команда, яка надає комплексне керівництво та підтримку.
- Пропонує безкоштовний ремонт у разі пошкодження апаратного забезпечення, спричиненого експлуатаційними помилками протягом гарантійного періоду (за винятком аксесуарів і батарей).
Можливість налаштування
- Забезпечує підтримку ексклюзивної розробки в ROS і QGC.
- Підтримує високу точність понад 98% для картографування та навігації.
- Сумісність з модулями RTK/GPS, логотипами та різними унікальними функціями.

Конфігурація наземної станції
Використання контролера польоту Pixhawk 2.4.8
Оснащений найновішим стандартним 32-розрядним процесором STM32F427 і барометром MS5611, цей польотний контролер пропонує велику кількість інтерфейсів і високу економічну продуктивність як опція з відкритим кодом.
1. Ексклюзивна глибоко налаштована наземна станція QGC
- Досягає понад 98% локалізації китайською мовою.
- Підтримує розширені функції, такі як NTRIP.
2. Мобільна наземна станція QGC
- Надає мобільну версію наземної станції QGC, що забезпечує безперебійну роботу зі смартфона.
3. Пряме підключення Wi-Fi або 4G
- Просто підключіться через Wi-Fi, щоб працювати за допомогою смартфона або комп’ютера.
- Примітка: система "ezuav" показує, що вона підключена до пристрою, але не може забезпечити доступ до Інтернету.

Комплексні навчальні посібники та ресурси з повністю відкритим кодом
- Надзвичайно докладні посібники з використання, що охоплюють усі аспекти функціональності дрона S2-F290.
- Повністю відкриті матеріали, включаючи:
- Ознайомлення з програмним забезпеченням і посібники зі встановлення.
- Навчальні посібники для основних і розширених функцій, таких як розпізнавання об’єктів на основі OpenCV, 3D-карти та автономний політ поза бортом.
- Спеціальні інструкції з розробки для зв’язку PX4 і MAVLink.
- Поширені запитання щодо усунення несправностей, конфігурація середовища ROS та робочі дії.
Related Collections


