









SteadyWin GIM3510-8 модуль суглоба малого робота, планетарний редуктор 8:1, CAN-драйвер, подвійний енкодер, 24В 60Вт
SteadyWin GIM3510-8 модуль суглоба малого робота, планетарний редуктор 8:1, CAN-драйвер, подвійний енкодер, 24В 60Вт
SteadyWin
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Модуль малого роботизованого суглоба SteadyWin GIM3510-8 є інтегрованим роботизованим приводом суглоба, який поєднує в собі мотор Aloha, планетарний редуктор 8:1, вбудований драйвер зв'язку та подвійні енкодери в компактному циліндричному корпусі. З номінальним живленням 24 В (широкий діапазон 12–40 В або 12–48 В в залежності від плати драйвера), високою вихідною швидкістю до 564,6 об/хв після редукції та зв'язком по CAN-шині, він призначений для агресивних гуманоїдних роботів, роботизованих рук, мобільних платформ та інших багатосистемних систем, які потребують точного, замкнутого контролю руху.
Ключові особливості
- Високошвидкісний планетарний редуктор: планетарний редуктор 8:1 з номінальною вихідною швидкістю 535,5 об/хв та максимальною 564,6 об/хв (GDZ34), підходить для швидко рухомих суглобів.
- Широкий діапазон напруги: Номінальна робота 24 В з діапазоном вхідної напруги 12–40 В (GDZ34) або 12–48 В (GDS34) для гнучкого проектування енергетичних систем.
- Ефективний вихідний момент: Постійний момент до 0.32 N.m/A з номінальним моментом до 1.68 N.m і піковим моментом до 6.02 N.m, що забезпечує ефективну передачу потужності для легких і середніх роботизованих суглобів.
- Інтегрований драйвер з CAN-шиною: Вбудована плата драйвера (GDS34 або GDZ34) підтримує CAN-зв'язок для спрощення підключення та мережевого управління.
- Подвійний зворотний зв'язок енкодера: 14-бітний енкодер на драйвері та другий енкодер на вихідному валу для точного зворотного зв'язку щодо позиції та швидкості.
- Компактна структура: Лише 46 мм зовнішній діаметр з загальною довжиною від 46.5 мм (без драйвера) до 51.5 мм (з драйвером), що дозволяє щільні багатосуглобові конфігурації.
- Екологічна стійкість: Рейтинг захисту IP54, робоча температура від -20°C до +80°C та рівень шуму нижче 60 дБ.
- Функції захисту: Захист від перевищення температури, перевищення напруги та перевантаження допомагає підтримувати безпечну та надійну роботу в системах робототехніки з безперервним режимом роботи.
- Механічна міцність: Підтримує осьове навантаження до 75 Н та радіальне навантаження до 300 Н на вихідному валу, з зворотним зазором редуктора 15 дугових хвилин.
- Опція індивідуального гальма: Підтримує інтеграцію індивідуального гальма для суглобів, які потребують утримуючого моменту при відключенні живлення.
Для технічної підтримки, налаштування або питань інтеграції щодо модуля малого роботизованого суглоба GIM3510-8, будь ласка, зв'яжіться з https://rcdrone.top/ або надішліть електронний лист на [email protected].
Застосування
- Гуманоїдні роботи
- Роботизовані руки
- Екзоскелети
- Чотириногі роботи
- AGV транспортні засоби
- ARU роботи
Специфікації
| Параметр | Одиниця | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| Модель | - | GIM3510-8 | GIM3510-8 |
| Модель плати драйвера | - | GDS34 (SDC101) | GDZ34 |
| Номінальна напруга | В | 24 | 24 |
| Діапазон напруги | В | 12–48 | 12–40 |
| Номінальна потужність | Вт | 98 | 60 |
| Номінальний крутний момент | N.m | 1.68 | 1.00 |
| Максимальний крутний момент | N.m | 3.41 | 6.02 |
| Номінальна швидкість після редукції | об/хв | 430 | 535.5 |
| Максимальна швидкість після редукції | об/хв | 529 | 564.6 |
| Номінальний струм | A | 4.1 | 2.5 |
| Максимальний струм | A | 8.30 | 25.30 |
| Опір фази | Ом | 0.48 | 0.48 |
| Індуктивність фази | мГн | 0.31 | 0.31 |
| Константа швидкості | об/хв/В | 22.04 | 23.53 |
| Константа крутного моменту | N.m/A | 0.44 | 0.32 |
| Кількість пар полюсів | Пари | 7 | 7 |
| Передаточне число | - | 8:1 | 8:1 |
| Тип передачі | - | Планетарна | Планетарна |
| Матеріал редуктора | - | ALU | ALU |
| Зазор редуктора | аркмін | 15 | 15 |
| Вага мотора без драйвера | г | 247.6 | 247.6 |
| Вага мотора з драйвером | г | 259.6 | 259.6 |
| Розмір без драйвера (діаметр x довжина) | мм | Ø46 x 46.5 | Ø46 x 46.5 |
| Розмір з драйвером (діаметр x довжина) | мм | Ø46 x 51.5 | Ø46 x 51.5 |
| Максимальне осьове навантаження | N | 75 | 75 |
| Максимальне радіальне навантаження | N | 300 | 300 |
| Шум | dB | <60 | <60 |
| Зв'язок | - | CAN | CAN |
| Другий енкодер на вихідному валу | - | ТАК | ТАК |
| Клас захисту | - | IP54 | IP54 |
| Робоча температура | °C | -20 до +80 | -20 до +80 |
| Роздільна здатність енкодера (енкодер драйвера) | біт | 14 | 14 |
| Окреме підтримка енкодера | - | НІ | НІ |
| Кастомна підтримка гальм | - | ТАК | ТАК |
Посібники
- SteadyWin_GIM3510-8_Схема_встановлення.stp
- GlM3510-8_схема_монтажу.pdf
- Gl3510-8_з_гальмом_схема_монтажу.pdf
Деталі

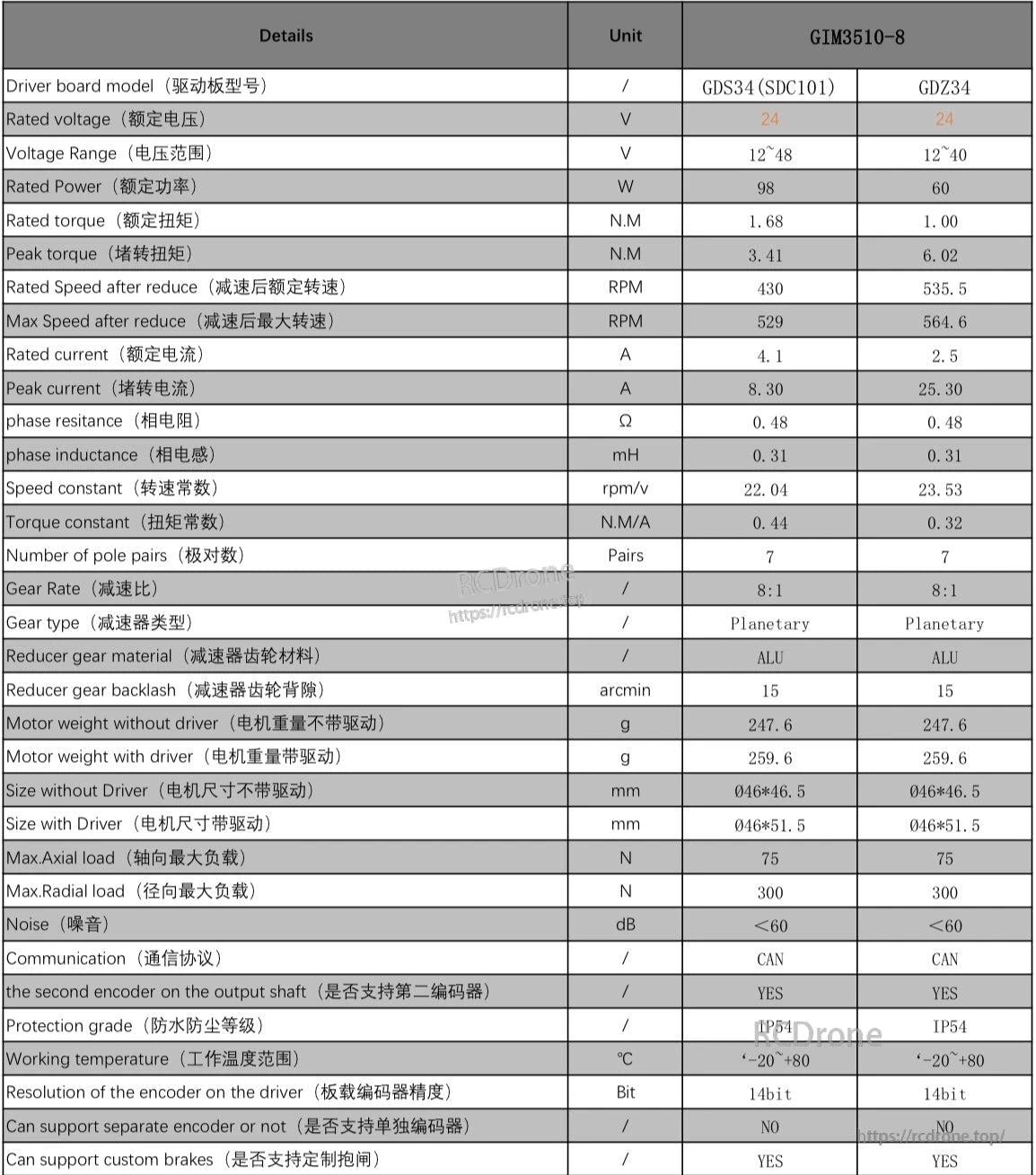
Специфікації суглоба робота GIM3510-8 порівнюють плати драйверів GDS34 та GDZ34. Ключові показники включають напругу, потужність, крутний момент, швидкість, струм, вагу, розмір, вантажопідйомність, шум, зв'язок, енкодер, клас захисту, діапазон температури та підтримку індивідуального гальма.
Related Collections









