CUAV Високоточний RM3100 C-Compass Зовнішній компас-магнітометр для Pixhawk PX4 ArduPilot DroneCAN/UAVCAN
CUAV Високоточний RM3100 C-Compass Зовнішній компас-магнітометр для Pixhawk PX4 ArduPilot DroneCAN/UAVCAN
CUAV
Звичайна ціна
$203.00 USD
Звичайна ціна
Ціна продажу
$203.00 USD
Ціна за одиницю
пер
Taxes included.
Доставка розраховується під час оформлення замовлення.
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
CUAV C-Compass - це зовнішній компас (високоточний магнітометр), побудований на основі магнітного сенсора RM3100 для екосистем контролерів Pixhawk та PX4. Він використовує комунікацію через шину DroneCAN/UAVCAN і сумісний з платформами ArduPilot та PX4, з вбудованим процесором STM32F4, що працює на архітектурі програмного забезпечення CUAV M4C для стабільного вимірювання курсу в електрично шумних конструкціях.
Ключові особливості
- Магнітний сенсор RM3100
- Вбудований процесор STM32F4
- Програмна архітектура M4C, розроблена CUAV
- Сумісність з платформою програмного забезпечення для польотів APM/PX4
- Підтримка протоколу DroneCAN/UAVCAN
- Розроблено для низького рівня шуму та антиінтерференційних характеристик при використанні як зовнішній компас
Специфікації
| MCU | STM32F412 (32-бітний Arm Cortex-M4, 100 МГц, 512 КБ FLASH, 256 КБ RAM) |
| Сенсор | RM3100 |
| Програмна архітектура | CUAV M4C |
| Протокол | DroneCAN/UAVCAN |
| Швидкість зв'язку | 2 Мб |
| Частота оновлення | 80 Гц |
| Шум | 15nT |
| Точність | 0.25° (ефективне значення) |
| Точність повторення | 0.05° |
| Роздільна здатність | 0.01° |
| Чутливість | 13nT |
| Діапазон | -800 μT до +800 μT |
| Тип контролера | PX4/ArduPilot (CUAV/Pixhawk тощо) |
| Інтерфейс | GHR-04V-S |
| Робоча напруга | 4.75-5.3V |
| Робоча температура | -20 до 80°C |
| Робоча вологість | 5% до 95% (без конденсації) |
| Матеріал корпусу | Алюмінієвий сплав |
| Розмір | 31.5 x 31.0 x 14.0мм |
| Вага | 13г |
| Вказана вага | 0.5 кг |
| Вказані розміри | 20 x 10 x 10 см |
Опції
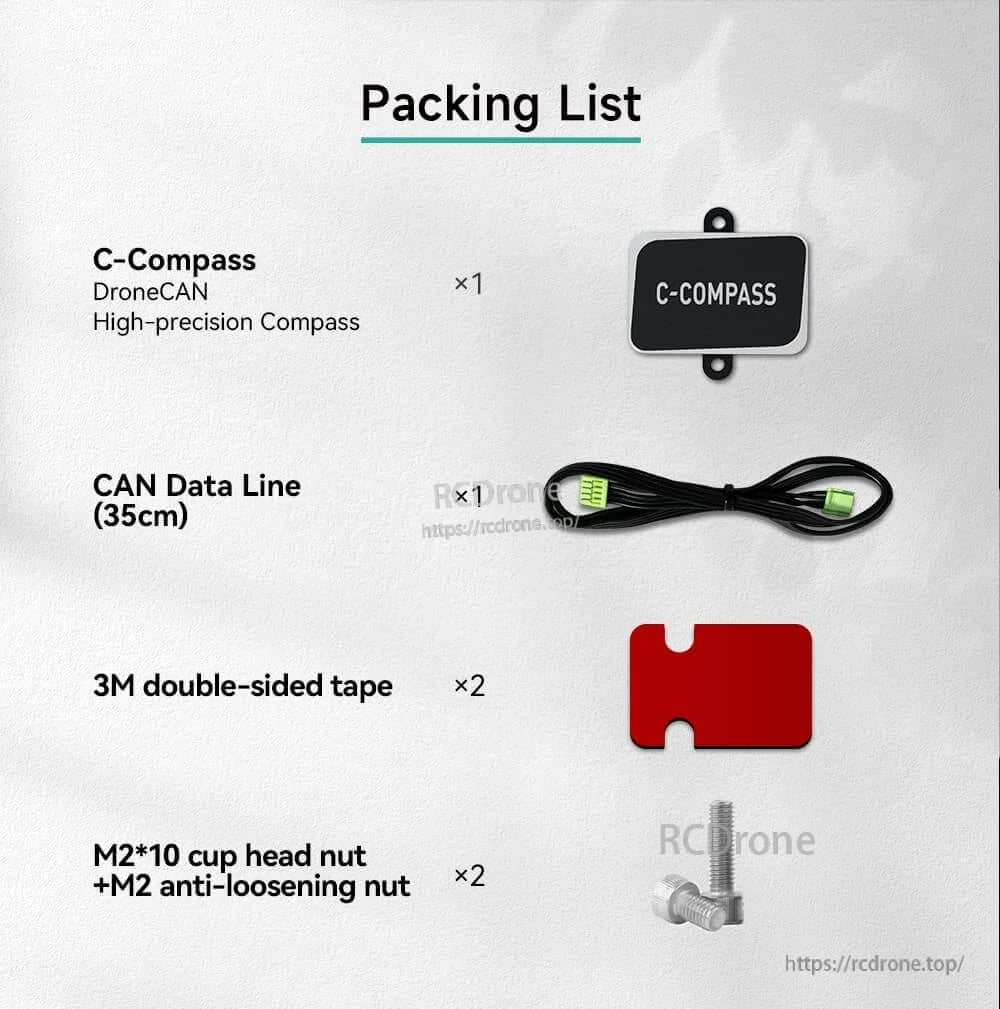
- C-Compass * 3 шт
- C-Compass & NEO 3 GPS / Набір
- C-Compass & NEO 3 Pro GPS / Набір
- C-Compass & NEO 3X GPS / Набір
Застосування
- Зовнішній компас/вимірювання курсу для систем автопілотів Pixhawk та CUAV, що працюють на PX4 або ArduPilot
- Покращення стабільності магнітних вимірювань шляхом монтажу подалі від джерел перешкод (кабелі, акумулятори, мотори)
Для питань інтеграції та сумісності (налаштування DroneCAN/UAVCAN, параметри ArduPilot/PX4, проводка), звертайтеся [email protected] or відвідайте https://rcdrone.top/ .
Related Collections