Дослідницький безпілотник SU17 - Розробка промислового безпілотника з відкритим вихідним кодом PX4 з MID-360 LiDAR, чотирма камерами SLAM, EGO-Swarm
Дослідницький безпілотник SU17 - Розробка промислового безпілотника з відкритим вихідним кодом PX4 з MID-360 LiDAR, чотирма камерами SLAM, EGO-Swarm
RCDrone
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Дослідницький безпілотник SU17 — це високопродуктивний квадрокоптер з a Акумулятор 6000mAh, MID-360 ЛіДАР для 3D картографування, чотирикамерна система SLAM для точної локалізації та інтегр GPS+GLONASS позиціонування. Зі злітною вагою 2,3 кг і а вантажопідйомність 200 г, він пропонує 21 хвилина польоту у режимі візуального позиціонування. Завдяки програмному забезпеченню Prometheus він підтримує розпізнавання цілей, планування шляху та автономну навігацію, що робить його промислового класу рішення для досліджень та інновацій.
Апаратні параметри
Літак
| Параметр | опис |
|---|---|
| Тип літака | Квадрокоптер |
| Злітна вага (прибл.) | 2,3 кг (із захисною кришкою та акумулятором) |
| Діагональна відстань | 320 мм |
| Розміри | Довжина: 442 мм, Ширина: 388 мм, Висота: 174 мм (без захисної кришки) |
| Максимальне корисне навантаження | 200 г |
| Час польоту зависання | прибл. 13 хв (при наведенні на 100%, не нижче 0%), візуальне позиціонування: 21 хв. |
| Точність наведення | GPS: по вертикалі ±1,5 м, по горизонталі ±2,0 м |
| 3D LiDAR SLAM: по вертикалі ±0,08 м, по горизонталі ±0,08 м | |
| 4-камерний візуальний SLAM: по вертикалі ±0,05 м, по горизонталі ±0,05 м | |
| Рівень вітростійкості | Рівень 4 |
| Робоча температура | від -10°C до 40°C |
| Головна мікросхема MCU | STM32H743 |
| ІДУ | ICM42688/BMI088 |
| Барометр | MS5611 |
| компас | QMC5883L |
| Інтерфейс | USB Type-C |
Бортовий комп'ютер
| Параметр | опис |
|---|---|
| Процесор | Intel Core i5-8365U |
| Ємність пам'яті | 8 ГБ |
| Частота пам'яті | LPDDR3@2133MHz |
| Зберігання | 256 ГБ NVMe SSD |
| Мережевий порт | Baidu Apollo Ethernet X2, 12V@3A power живлення, підтримує IEEE 1588-2008 (PTP v2) |
| Послідовний порт | Послідовний порт TTL X2, 5 В/3.3V@500mA power постачання |
| USB | Type-C X2 (1x USB2.0, 1x USB3.0) |
| HDMI | HDMI 1.4 |
Акумулятор живлення
| Параметр | опис |
|---|---|
| Модель | СУ17-Л |
| Тип батареї | Літій-полімерний акумулятор високого тиску |
| Номінальна напруга | 26,4 В (макс.), 21 В (мін.) |
| Напруга зберігання | 22,8 В (типове) |
| Номінальна місткість | 6000 мАг |
| вага | 680 г |
| Розміри | Довжина: 85,2 мм, Ширина: 86.5 мм, висота: 135 мм |
Пульт дистанційного керування
| Параметр | опис |
|---|---|
| Модель | QE-2 |
| Канали | 8 |
| Потужність передачі | 18~20 дБм |
| вага | 294,1 г |
Карданний підвіс
| Параметр | опис |
|---|---|
| Контрольований кут | -90° ~ 30° (осі нахилу) |
| Протокол потокової передачі | RTSP (стандарт) |
| Формат кодування | H.264 |
| роздільна здатність | 1080P @ 25 кадрів в секунду |
| Діагональний кут огляду (D) | 120° |
| Вертикальний кут огляду (V) | 54° |
| Горизонтальний кут зору (H) | 95° |
Передача зображення
| Параметр | опис |
|---|---|
| Робоча частота | 2,4 ГГц |
| Потужність передачі | 18 дБм |
| Дальність зв'язку | 3 км (без перешкод, без перешкод) |
| Діапазон зображення | 1 км (мінімум перешкод, відсутність перешкод) |
| Максимальна пропускна здатність | 40 Мбіт/с |
Чотирикратна камера глибини
| Параметр | опис |
|---|---|
| Прискорювач зору | Intel Movidius Myriad X VPU |
| Максимальна роздільна здатність | 1296x816 |
| Максимальна частота кадрів | 1280x800 @ 120 кадрів в секунду |
| Тип затвора | Глобальний затвор |
| Формат кодування | 8/10-бітний один потік |
| FOV | 150° по діагоналі, 127,4° по горизонталі, 79,7° по вертикалі |
| Кількість датчиків | 4 (2 передніх + 2 задніх) |
| ІДУ | ІМТ270 |
GNSS
| Параметр | опис |
|---|---|
| Горизонтальна точність | 1,5 м CEP (з SBAS) |
| Точність швидкості | 0,05 м/с |
| Режим роботи | GPS + ГЛОНАСС + BDS + GALILEO + SBAS + QZSS |
Зарядний пристрій
| Параметр | опис |
|---|---|
| Модель | ЛК150-2640500 |
| Вхідна напруга змінного струму | 100В ~ 240В |
| Вхідна напруга постійного струму | 26.4В |
| вага | 460 г |
| Струм зарядки | 5А |
3D ЛіДАР
| Параметр | опис |
|---|---|
| Модель | MID-360 |
| Довжина хвилі лазера | 905 нм |
| Діапазон вимірювання | 40 м при коефіцієнті відбиття 10%. |
| FOV | По горизонталі 360°, по вертикалі -7° ~ 52° |
| Мінімальний діапазон | 0,1 м |
| Точкова частота | 10 Гц (типова) |
| Точка виведення | 200 000 точок/с |
| Інтерфейс даних | 100 BASE-TX Ethernet |
| Синхронізація даних | IEEE 1588-2008 (PTP v2), GPS |
| Вбудований IMU | ICM40609 |
| Напруга живлення | 7~27В |
| Розміри | 65 мм (Ш) x 65 мм (Г) x 60 мм (В) |
| вага | 115 г |
| Робоча температура | -20°C ~ 55°C |
Параметри програмного забезпечення
Бортовий комп'ютер
| Параметр | опис |
|---|---|
| Модель | Intel Core i5-8365U |
| система | Ubuntu 20.04 |
| Ім'я користувача | амов |
| Пароль | амов |
| ROS | ноетичний |
| OpenCV | 4.7.0 |
| Система візуального позиціонування | BSA_SLAM V1 |
Програмне забезпечення Prometheus
| Параметр | опис |
|---|---|
| Версія | v2.0 |
| Система наземних станцій Prometheus | v1.24.11.27 (остаточна версія на основі запису про випуск Wiki) |
Подробиці
SU17 Дослідницьке видання
Дослідницький дрон промислової якості
- Додатковий 3D LiDAR: дозволяє картографувати, позиціонувати та уникати навігаційних перешкод.
- Програмне забезпечення автономного дрона Prometheus: багато демонстрацій для швидкого освоєння керування дроном.
- Літальна платформа промислового рівня: стабільний і відкритий, встановлюючи новий стандарт продуктивності дослідницького дрона.

Ключові характеристики
Дослідження SU17 Платформа розробки дронів (іменується як SU17) має інтегровану конструкцію, що включає контролери польоту, бортові комп’ютери, модулі SLAM із чотирма камерами, хмарні камери та модулі передачі зображення для інтеграції високого рівня, значно підвищуючи стабільність і надійність апаратного забезпечення. Оснащений програмним забезпеченням автономного дрона Prometheus, SU17 підтримує такі функції, як розпізнавання цілей, відстеження та планування шляху для різних сценаріїв керування польотом.
Додатково він інтегрує MID-360 3D LiDAR у поєднанні з алгоритмом FAST-LIO для досягнення 3D LiDAR SLAM, пропонуючи точне визначення навколишнього середовища та інформацію про позиціонування. У поєднанні з алгоритмом планування шляху EGO-Swarm він забезпечує ефективне 3D-картування в реальному часі та уникнення перешкод у складних середовищах.




Програмна система Prometheus V2
Платформа розробки побудована на ROS і фреймворку з відкритим вихідним кодом Prometheus, пропонуючи багаті функціональні можливості та розширені вторинні API розробки для ефективного перепрограмування. Він надає доступ до інформації про позиціонування, режими польоту, стан батареї, дані IMU та інші інтерфейси даних про стан дрона та дані датчиків, а також інтерфейси керування положенням, швидкістю, прискоренням і положенням.
Крім того, він містить приклади використання пов’язаних API. Крім того, дрон має функції перевірки безпеки під час польоту (захист від аварій), що дозволяє автоматично спускатися за нестандартних умов, зменшуючи ризик аварій і забезпечуючи більш безпечний процес розробки.

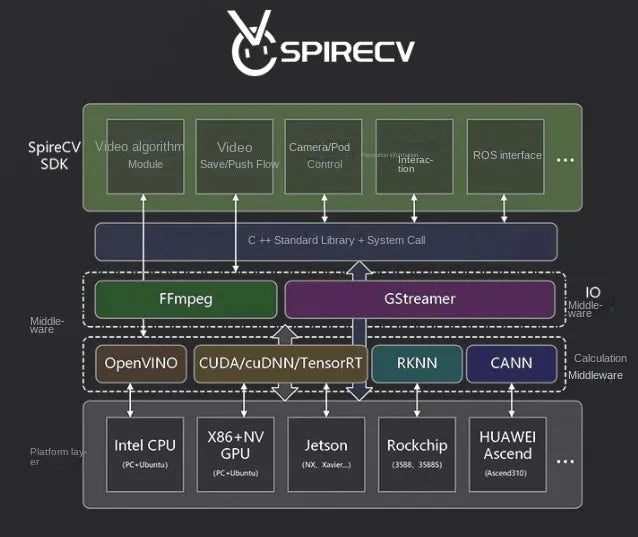
Бібліотека SpireCV Vision
Бібліотека SpireCV Vision Library — це SDK для обробки зображень у реальному часі, спеціально розроблений для інтелектуальних систем БПЛА. Він забезпечує такі функції, як керування підвісом і камерою, зберігання та потокове передавання відео, виявлення цілей, розпізнавання та відстеження.
Цей SDK має на меті запропонувати високу продуктивність, надійність і спрощений інтерфейс для розробників інтелектуальних систем БПЛА. Завдяки багатофункціональному рішенню для візуальної обробки це дозволяє розробникам ефективно впроваджувати різні складні програми на основі зору.
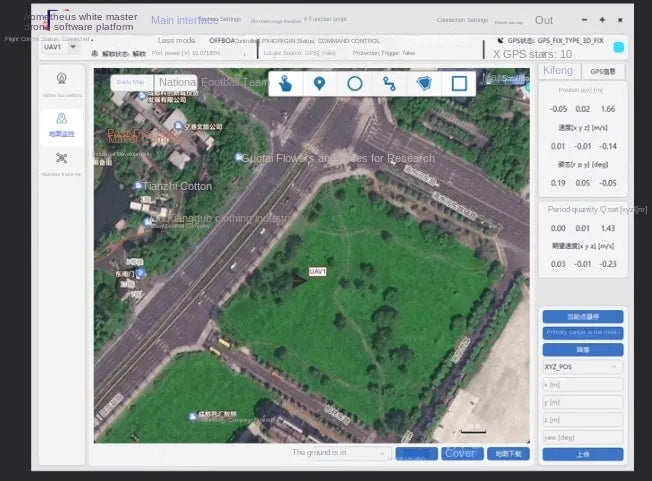
Наземна станція «Прометей».
Наземна станція Prometheus — це інтерфейс взаємодії людини та дрона, розроблений на основі системи Prometheus, побудованої за технологією Qt. Це дозволяє швидко відтворювати функціональні можливості системи Prometheus, забезпечуючи моніторинг у реальному часі та 3D-візуалізацію стану дрона та даних керування.
За допомогою наземної станції користувачі можуть виконувати такі команди, як зліт одним клацанням миші, наведення на поточну позицію, приземлення та контроль позиції. Крім того, система підтримує спеціальні функціональні кнопки для ініціювання визначених користувачем сценаріїв або надсилання спеціальних повідомлень, що значно покращує зручність, ефективність і масштабованість операцій користувача.
Потужне розширення
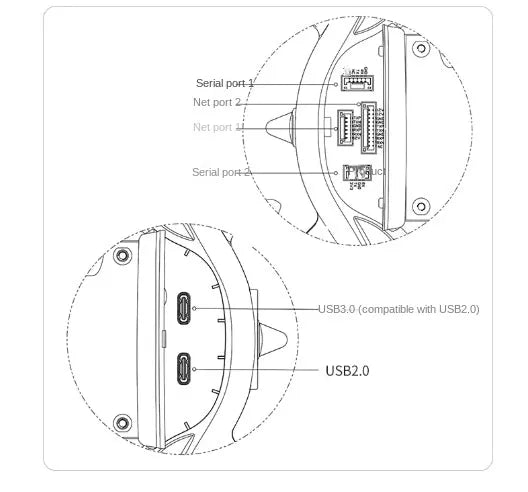
Порти апаратного розширення
-
Послідовний порт 1
-
Послідовний порт 2
-
Мережевий порт 1
-
Мережевий порт 2
-
USB порти:
- USB 3.0 (сумісний з USB 2.0)
- USB 2.0
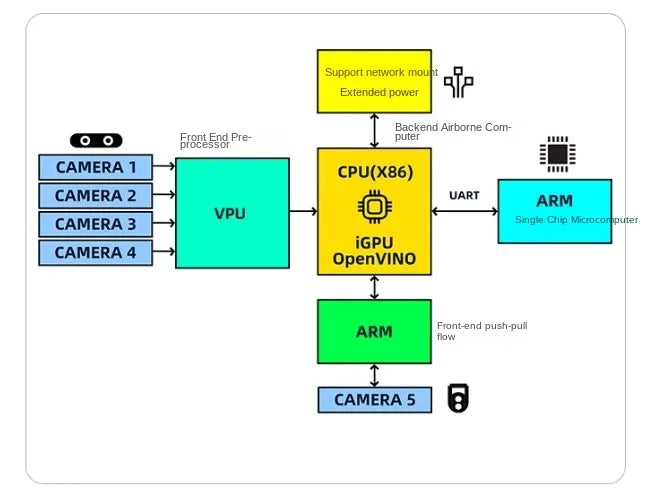
Апаратна структура
Зображення ілюструє апаратну архітектуру безпілотника SU17, підкреслюючи інтеграцію різних компонентів для розширеної обробки даних і керування системою:
-
Камери (Камера 1-4):
Підключений до a VPU (блок обробки зору) для передньої попередньої обробки. -
ВПУ:
Обробляє візуальні дані з кількох камер і передає їх на блоки обробки. -
ЦП (X86) з iGPU і OpenVINO:
Служить основним обчислювальним блоком для внутрішньої обробки, підтримуючи можливості розширення підключення до мережі для підвищення обчислювальної потужності. -
Однокристальний мікроконтролер ARM:
Взаємодіє з центральним процесором через інтерфейс UART для додаткових функцій керування. -
Конвеєрне передавання та камера 5:
Керується спеціальним процесором ARM для подальшої оптимізації даних.
Ця структура об’єднує кілька процесорних блоків, підтримуючи аналіз зображень у реальному часі, розширені обчислювальні завдання та безперебійний зв’язок між апаратними компонентами. Він забезпечує ефективне виконання складних операцій у дослідницьких і дослідницьких програмах.
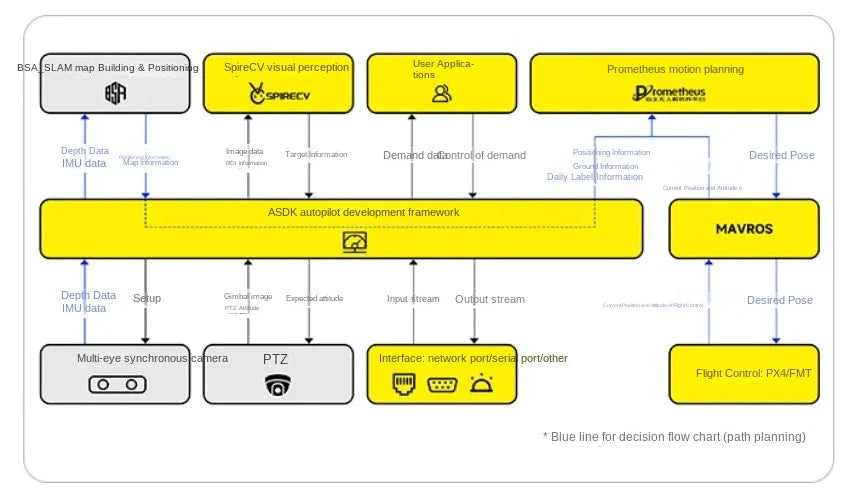
Програмний фреймворк
Діаграма ілюструє програмну архітектуру дрона SU17, підкреслюючи інтеграцію різних систем для автономної роботи:
-
BSA_SLAM (відображення та локалізація):
- Надає дані просторового відображення та позиціонування.
- Інтегрує входи датчиків глибини та IMU для точного сприйняття середовища.
-
SpireCV Vision Perception:
- Обробляє візуальні дані, включаючи виявлення об’єктів, інформацію про ROI та відстеження цілі.
-
Програми користувача:
- Інтерфейси для завдань, керованих користувачем, таких як візуалізація даних і введення команд.
-
Планування руху Prometheus:
- Керується плануванням траєкторії, використовуючи дані про положення, швидкість і ціль.
-
Інфраструктура автономного водіння ASDK:
- Виконує роль центрального рівня обробки, керуючи потоком даних між датчиками, камерами, хмарними модулями та зовнішніми інтерфейсами.
- Підтримує декілька каналів введення/виведення (наприклад, мережеві порти, послідовні порти).
-
МАВРОС:
- Зв'язується з системами управління польотом (PX4/FMT) для контролю стану польоту та положення.
-
Хмарний модуль і камери Multi-Sync:
- Інтегрує хмарні дані для розширеної обробки.
- Синхронізує візуальні введення для високоточних операцій.
Сині лінії: представлення шляхів прийняття рішень для планування траєкторії.
Ця архітектура демонструє модульну розширювану конструкцію, що забезпечує безперебійний зв’язок між різними апаратними та програмними компонентами для надійної роботи дрона.
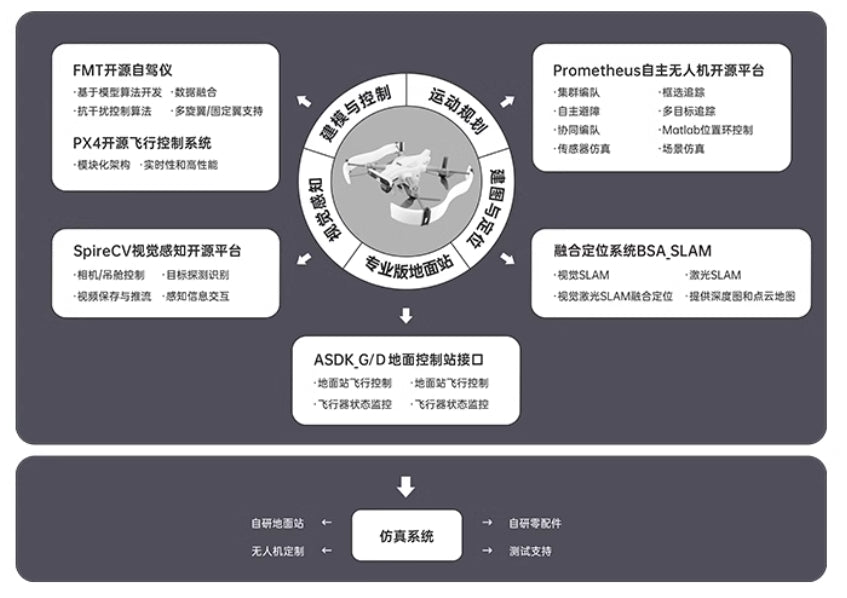
Інтелектуальна відкритість: інтегроване системне рішення БПЛА
Діаграма представляє всебічну та відкриту архітектуру систем безпілотників, підкреслюючи модульність та інтеграцію різних компонентів:
-
Основні компоненти:
- Автопілот з відкритим кодом FMT: Забезпечує надійне керування польотом на основі модульної розробки, підтримки різноманітних середовищ та інтеграції даних.
- Система управління польотом PX4: Забезпечує стабільність і підтримує розширену модульну настройку.
- Платформа сприйняття зору SpireCV: фокусується на обробці зображень, включаючи виявлення об’єктів, відстеження та потокове відео в реальному часі.
-
Ключові рамки:
- Автономна платформа БПЛА Prometheus: включає в себе керування декількома дронами, планування руху, спільну навігацію та моделювання реального світу.
- Система BSA_SLAM: поєднує SLAM на основі візуалізації та SLAM на основі LiDAR для точного позиціонування та картографування.
- Інтерфейс керування наземною станцією ASDK G/D: Забезпечує безперебійний зв’язок між наземними станціями та БПЛА для моніторингу та коригування в реальному часі.
-
Інтеграція робочого процесу:
- Висвітлює такі процеси, як планування руху, картографування середовища та автономна навігація.
- Інтеграція з професійними наземними станціями для контролю траєкторії, уникнення перешкод і керування даними в реальному часі.
-
Підтримка моделювання:
- Включає систему моделювання для тестування автономної місії, управління БПЛА та перевірки компонентів.
Ця система демонструє передове рішення для розробки автономних БПЛА з масштабованими можливостями для досліджень, застосування та тестування в різних сценаріях.
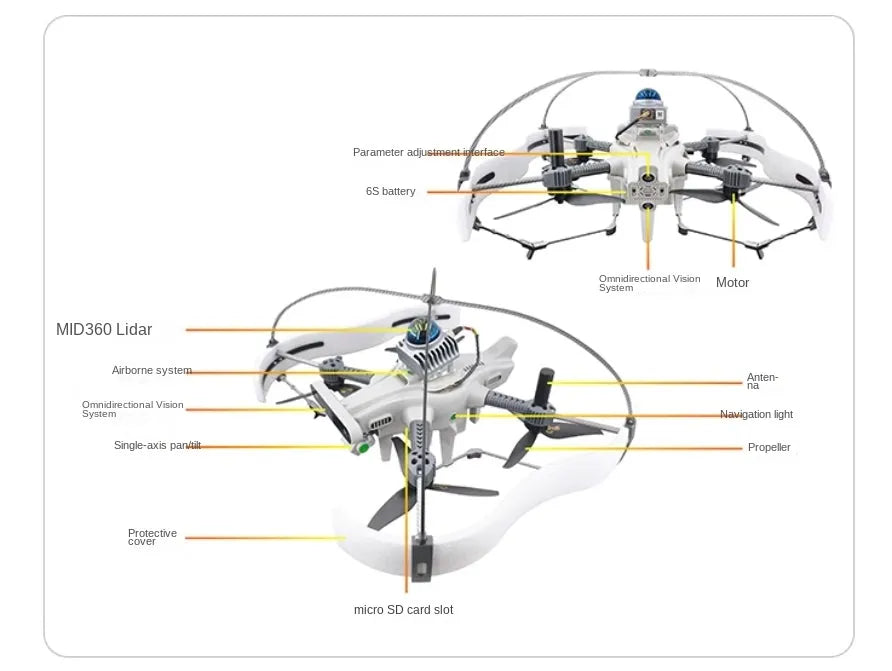
структурні компоненти дослідницького безпілотника SU17, що підкреслює його стабільність і передовий дизайн. Основні функції включають Лідар MID360 для точного відображення, an система всенаправленого бачення для комплексного сприйняття навколишнього середовища, а одноосьовий підвіс для стабілізованого зображення та надійний 6S акумулятор для збільшення потужності. Інші важливі компоненти включають пропелерна система, антена, навігаційні вогні, і a слот для карти micro SD для зберігання даних. Конструкція включає в себе передове апаратне забезпечення, що забезпечує надійність і високу продуктивність для різноманітних дослідницьких застосувань.
Related Collections