


TLIBOT TSJA17 - Гармонічний 50/80/100/120, 20-31 Нм, 48 В, 3000 об/хв, EtherCAT/CAN - Мотор для роботизованих з'єднань
TLIBOT TSJA17 - Гармонічний 50/80/100/120, 20-31 Нм, 48 В, 3000 об/хв, EtherCAT/CAN - Мотор для роботизованих з'єднань
TLIBOT
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
TLIBOT TSJA17 - це компактний роботизований мотор, що інтегрує гармонічний привід, високоточні абсолютні енкодери, інтерфейс польової шини та електромагнітний гальмо для точного роботизованого руху. Він підтримує кілька варіантів гармонічного зменшення і забезпечує високу щільність крутного моменту для легких роботизованих механізмів та колаборативних роботів.
Ключові особливості
- Варіанти гармонічного зменшення: 50 / 80 / 100 / 120.
- Номінальний крутний момент: 20 / 28 / 31 / 31 Нм; піковий крутний момент для старту/зупинки: 44 / 56 / 70 / 70 Нм.
- Максимально допустимий середній крутний момент навантаження: 34 / 35 / 51 / 51 Нм; миттєво допустимий максимальний крутний момент: 91 / 113 / 143 / 112 Нм.
- Максимальна швидкість обертання на виході: 60 / 37.5 / 30 / 25 об/хв.
- Номінальна швидкість мотора: 3000 об/хв; пікова миттєва швидкість мотора: 4500 об/хв.
- Номінальна напруга: 48 В; вага: 0.68 кг.
- Енкодери: 19-бітні однообертові абсолютні (без батареї) на виході; 19-бітні абсолютні (багатообертові через вихід, без батареї) на вході.
- Опції польової шини: EtherCAT / CAN / CAN FD.
- Інтегрований електромагнітний гальмо з зубчастим зацепленням.
- Згідно з зображеннями продукту: конструкція з'єднання з рейтингом IP54 з безперервним обертанням на 360°; підходить для легких рук у класі вантажопідйомності 5–10 кг, з досяжністю 500–1000 мм.
- Ілюстрований метод осьового монтажу для інтеграції оболонки (див. документ з установкою).
Для попередніх продажів або технічної підтримки звертайтеся https://rcdrone.top/ або [email protected].
Специфікації
| Параметр | Значення |
|---|---|
| Коефіцієнт зменшення гармонік | 50 / 80 / 100 / 120 |
| Номінальний крутний момент (Нм) | 20 / 28 / 31 / 31 |
| Допустимий піковий крутний момент для старту та зупинки (Нм) | 44 / 56 / 70 / 70 |
| Максимальний допустимий середній крутний момент (Нм) | 34 / 35 / 51 / 51 |
| Миттєвий допустимий максимальний крутний момент (Нм) | 91 / 113 / 143 / 112 |
| Максимальна швидкість обертання на виході (об/хв) | 60 / 37.5 / 30 / 25 |
| Точність повторного позиціонування | 1' |
| Номінальна швидкість двигуна (об/хв) | 3000 |
| Пікова миттєва швидкість двигуна (об/хв) | 4500 |
| Номінальна потужність двигуна | 80 |
| Номінальна напруга (В) | 48 |
| Вага (кг) | 0.68 |
| Роздільна здатність вихідного енкодера | 19 біт однообертний абс. (без батареї) |
| Роздільна здатність вхідного енкодера | 19 біт ST абс. (мультитур через вихід, без акумулятора) |
| Польовий шина | EtherCAT / CAN / CAN FD |
| Інтегроване гальмо | Електромагнітне гальмо з зубчастим зацепленням |
Застосування
- Гуманоїдні роботи
- Роботизовані руки
- Екзоскелети
- Чотириногі роботи
- AGV транспортні засоби
- ARU роботи
Посібники
- УЛЬТРА-ЛЕГКИЙ СУГЛОБНИЙ МОДУЛЬ CATALOGUE.pdf
- TSJA17_Installation_Illustration.pdf
- Серійна комунікація Specification.pdf
Деталі
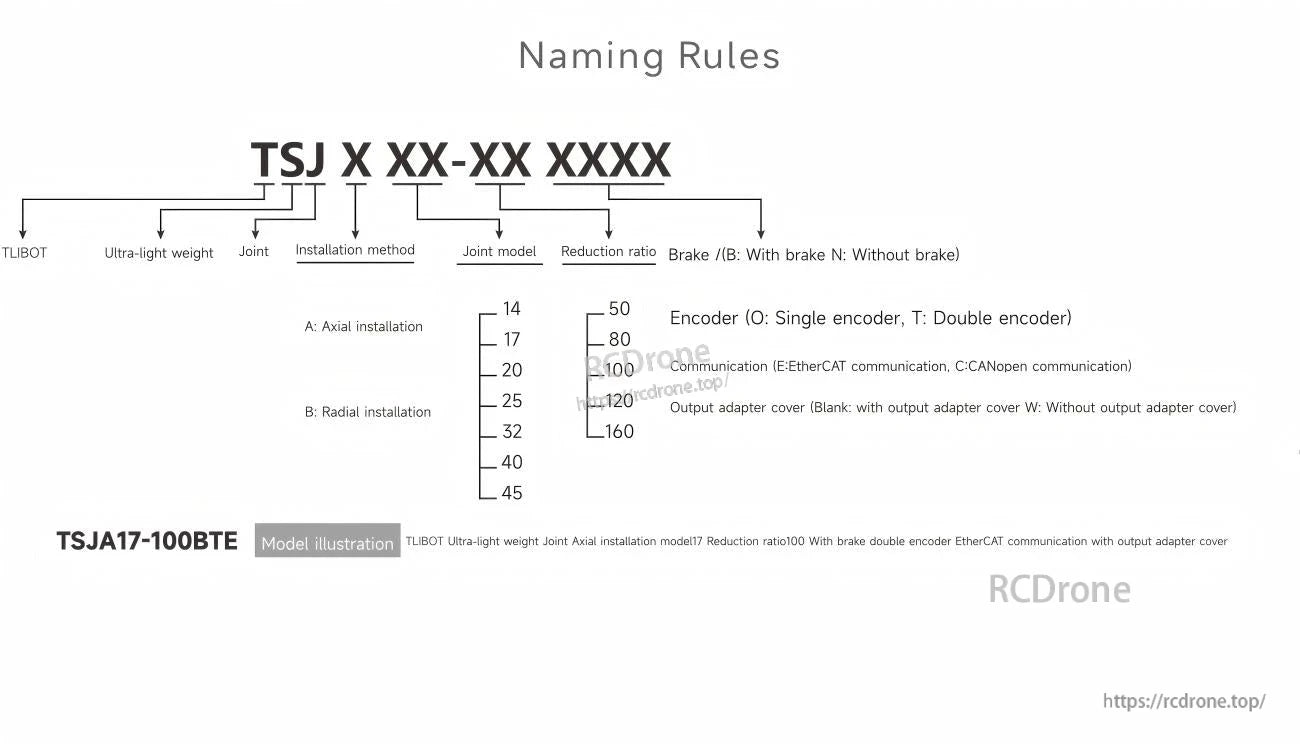
TSJA17-100BTE - це ультра-легкий суглоб TLIBOT з осьовим монтажем, модель 17, передавальне співвідношення 100, гальмо включено, подвійний енкодер, комунікація EtherCAT та кришка адаптера виходу.
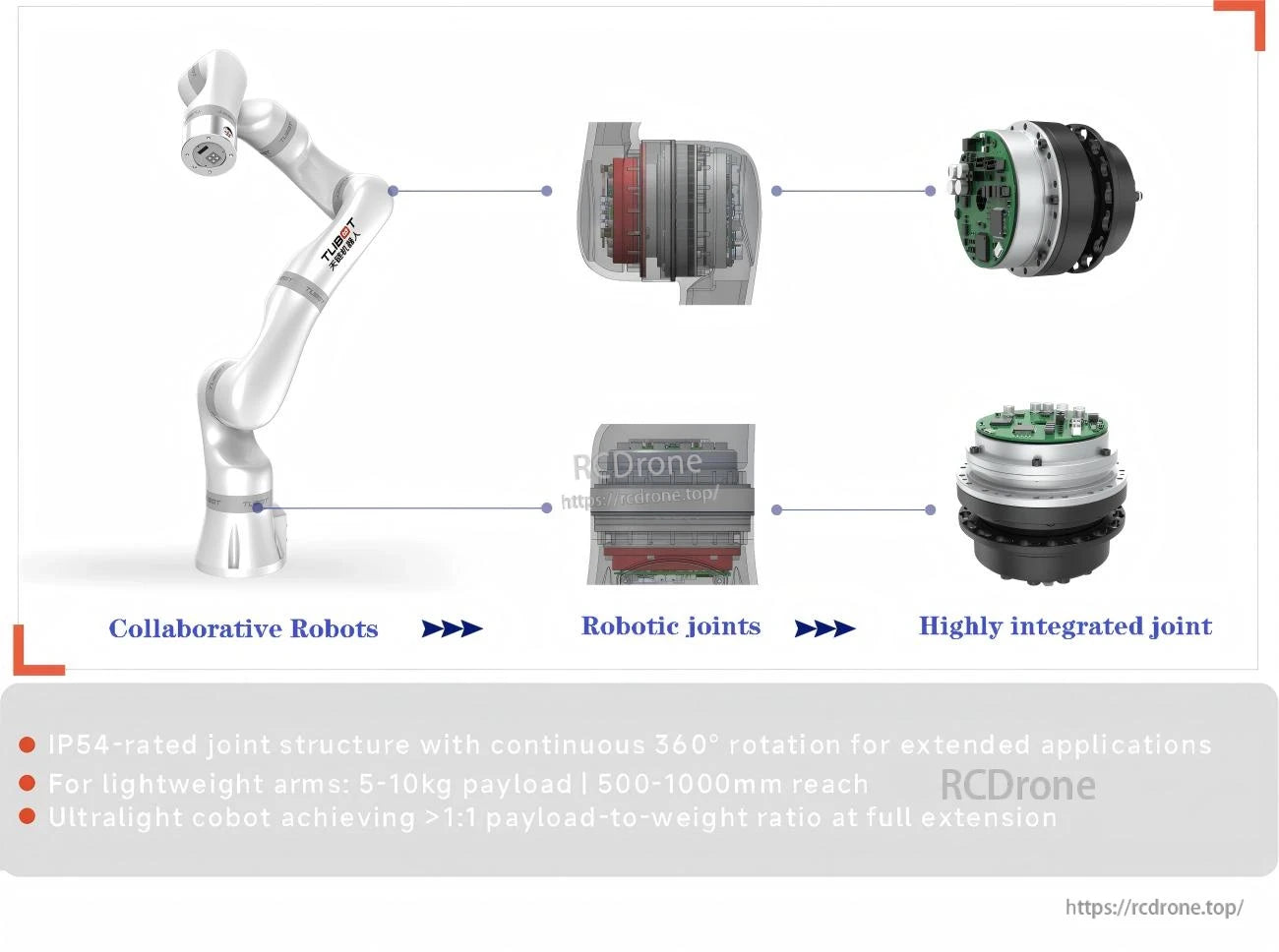
TLIBOT колаборативний робот з суглобами класу IP54, 360° обертання, вантажопідйомність 5-10 кг, досяжність 500-1000 мм та >1:1 співвідношення вантажу до ваги. Високоінтегрований дизайн суглобів для легких рук.
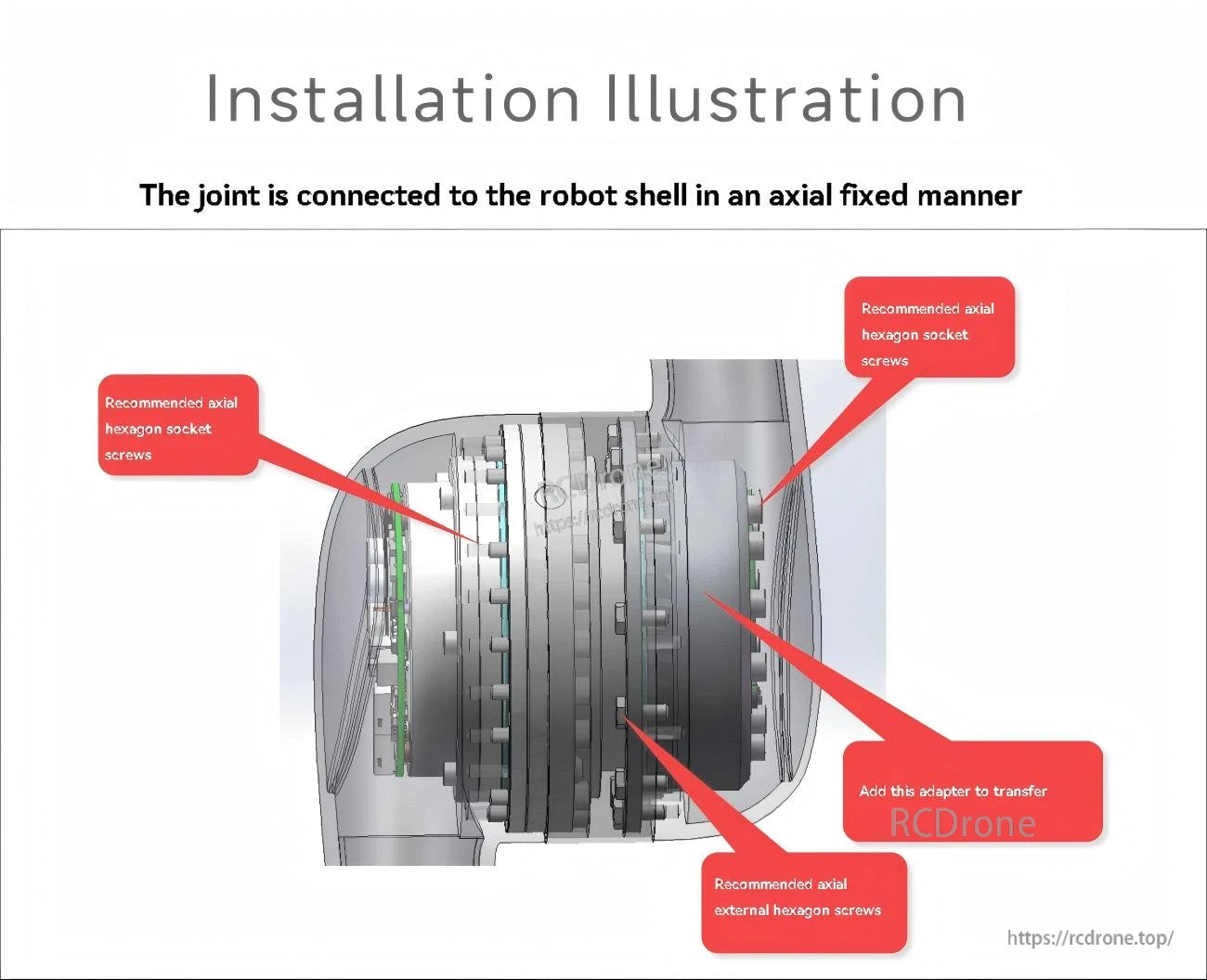
Інструкція з установки для суглоба TLIBOT TSJA17: осьові гвинтові з'єднання та використання адаптера.
Related Collections


