








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Гц – 6-осьовий акселерометр, гіроскоп, інклінометр, ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Гц – 6-осьовий акселерометр, гіроскоп, інклінометр, ROS/Matlab
WitMotion
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
Датчик WitMotion HWT601-AGV-485 є 6-осевим датчиком кута/орієнтації, призначеним для AGV роботів, дронів та автономних платформ. Він поєднує 3-осеве прискорення + 3-осеву кутову швидкість і виводить 3-осевий кут &та кватерніон через RS485 (Modbus) з частотою до 200 Гц. Модуль має динамічну фільтрацію Калмана, високоточну калібровку поворотного столу, автоматичне/ручне отримання зміщення, резервне живлення для збереження орієнтації при вимкненні та водонепроникний/пилонепроникний корпус IP67. Він також підтримує багаторівневе каскадування (до 32 одиниць) для синхронізованого вимірювання орієнтації.
Ключові особливості
-
Високоточний кут: точність XY 0.1°; точність Z 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
Стабільний біас гіроскопа: XY 5°/год; Z 2°/год (HWT601-AGV-485) / 5°/год (WT601-AGV-485).
-
Широкий вхід 9–36 В, робочий струм ≈ 8 мА @12 В.
-
RS485 Modbus, швидкість 4,800–230,400 біт/с.
-
Дослідження: запит–відповідь до 200 Гц.
-
Алгоритм: злиття фільтра Калмана та спеціалізований алгоритм напрямку AGV.
-
Програмне забезпечення: безкоштовний ПК набір з живими панелями, графіками, 3D візуалізацією (автомобіль/сфера/куб/плоскість), налаштуваннями (біас, кутова референція, калібрування прискорення, коефіцієнти масштабу), запис даних &та пряме збереження, а також імпорт в Matlab.
-
Дружній до розробників: приклади програм та підтримка коду для ROS, Linux, C/C#, Python.
-
Екологічний: IP67, -40~80 °C (показано варіант таблиці -40~85 °C).
-
Каскадний: до 32 сенсорів на RS485 для одночасного вимірювання положення.
Інструкції з установки
-
Закріпіть сенсор на щільній, рівній, стабільній поверхні; нерівні основи викликають кутову помилку (див. РИС.1–2).
-
Зберігайте віс сенсора паралельно до вимірювальної осі; уникайте міжосьових кутів (див. РИС.3–4).
-
Ця модель підтримує лише горизонтальну установку.
Програмне забезпечення &та візуалізація
-
Потужна панель даних (кут, швидкість, прискорення, магнітне поле, кватерніон, порти, температура, напруга тощо).
-
Панель конфігурації: швидкість передачі, адреса пристрою, автоматичне отримання зміщення, скидання осі Z, калібрування прискорення, посилання на кути, ручне калібрування позитивних/негативних значень та коефіцієнти масштабу.
-
3D моделі для інтуїтивного моніторингу руху та криві в реальному часі з динамічними оновленнями.
-
Перегляд сирих даних та збереження файлів для легкого збору; Matlab імпорт аналізу підтримується.
-
Демонстрації ROS IMU INS: візуалізація відстеження положення та відображення даних про положення (тангаж/крен/поворот, кутова швидкість, лінійне прискорення).
html
Специфікації
Інтерфейс &та продуктивність
| Товар | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Інтерфейс / Протокол | RS485 / Modbus | RS485 / Modbus |
| Швидкість передачі | 4,800–230,400 біт/с | 4,800–230,400 біт/с |
| Вихідні дані | 3-осеве прискорення, кутова швидкість, кут, кватерніон | Те ж саме |
| Частота дискретизації | До 200 Гц (запит–відповідь) | До 200 Гц |
| Точність кута XY | 0.1° | 0. 1° |
| Точність кута (помилка обертання на 360°) | 0.1° | 0.15° |
| Діапазон прискорення / роздільна здатність | ±4 g / 0.0001 g/LSB | Те ж саме |
| Діапазон гіроскопа / роздільна здатність | ±250 °/с / 0.0122 (°/с)/LSB | Те ж саме |
| Діапазон кута / роздільна здатність | XZ: ±180°; Y: ±90° / 0.0059° | Те ж саме |
| Нестабільність зміщення гіроскопа (XY / Z) | 5°/год / 2°/год | 5°/год / 5°/год |
| Температурний коефіцієнт (XYZ) | 0.002°/°C | 0.002°/°C |
Електричні, механічні &та навколишнє середовище
-
Напруга живлення: 9–36 V; Робочий струм: ≈ 8 mA (12 V)
-
Розміри: 55 × 36.8 × 24 мм; Довжина кабелю: 1 м
-
Захист: IP67
-
Температура експлуатації: -40~80 °C (варіант таблиці також показує -40~85 °C)
-
Монтаж: Тільки горизонтальне встановлення
-
Каскадне з'єднання: До 32 одиниць на RS485
Області застосування
AGV/AMR та мобільні роботи, дрони/UAV, безпілотні логістичні транспортні засоби та модулі сприйняття автономного водіння.
Найменування моделі &та вибір
-
HWT601-AGV-485 – вища точність по осі Z (0.1°) та нижня нестабільність Z-біасу (2°/год).
-
WT601-AGV-485 – стандартні характеристики осі Z (0.15°, 5°/h).
Виберіть HWT601, коли точність Z-орієнтації є критично важливою.
Деталі

Високоточний 6-осний датчик положення з 3-осним прискоренням, кутовою швидкістю, кутом та кватерніоном. Має алгоритм орієнтації AGV, захист IP67, фільтрацію Калмана, автоматичне отримання зміщення та підтримку програмного забезпечення для ПК.
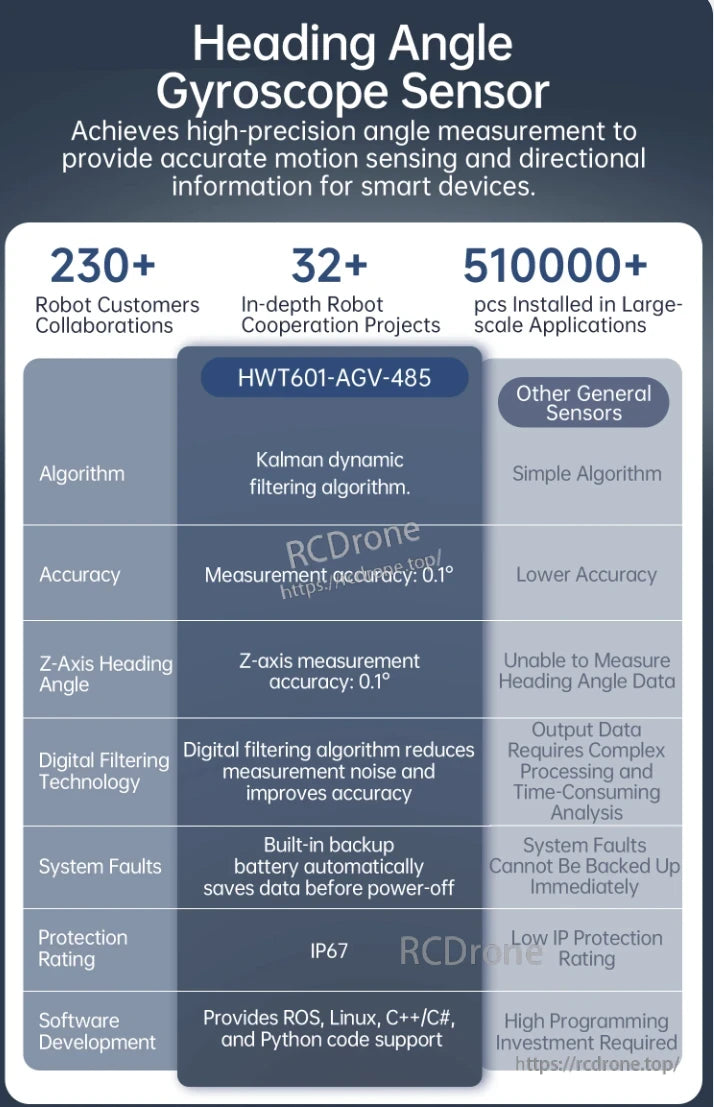
Датчик кута орієнтації HWT601-AGV-485 пропонує високоточне вимірювання кута з фільтрацією Калмана, точністю 0.1°, цифровим зменшенням шуму, захистом IP67 та підтримує ROS, Linux, C++ та Python. Понад 230 співпраць з роботами та 510,000+ установок.
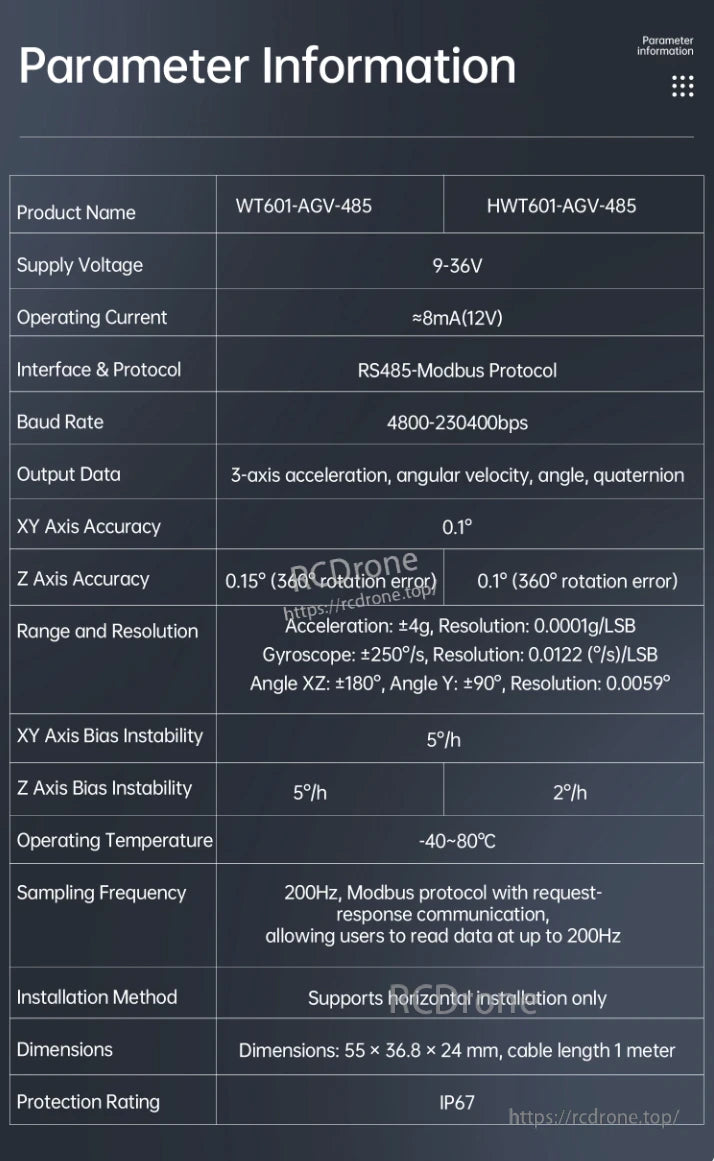
IMU HWT601-AGV пропонує живлення 9-36В, RS485-Modbus, 200Гц дискретизацію, прискорення ±4g, гіроскоп ±250°/с, клас захисту IP67, робочий діапазон -40~80°C. Забезпечує точні, високоякісні дані по трьох осях.
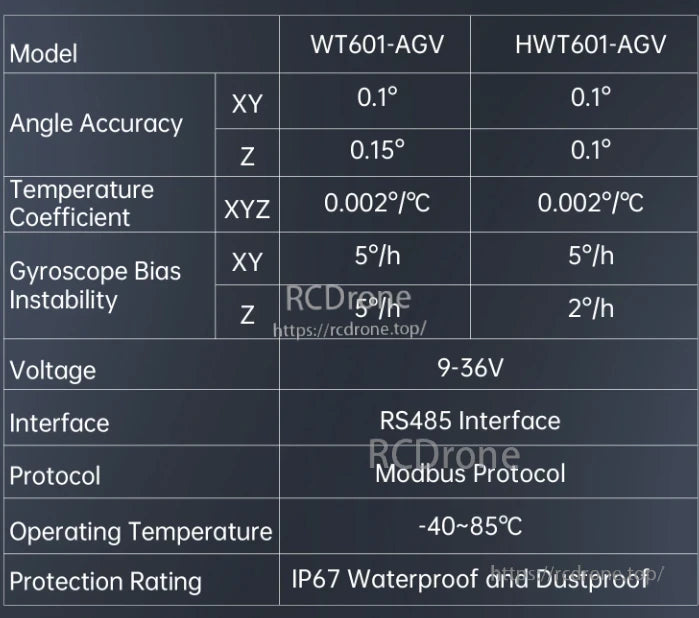
IMU HWT601-AGV пропонує точність кута 0.1° по осям XY та Z з температурним коефіцієнтом 0.002°/°C по всіх осях XYZ. Нестабільність зміщення гіроскопа становить 5°/год (XY) та 2°/год (Z). Він працює на 9–36В, використовує RS485 з Modbus і функціонує в діапазоні від -40 до 85°C. Клас захисту IP67 забезпечує водонепроникний та пилозахисний захист. Варіант WT601-AGV має подібні характеристики, але точність по осі Z становить 0.15° і нестабільність зміщення по осі Z - 5°/год. Обидві моделі забезпечують надійну роботу в складних умовах.
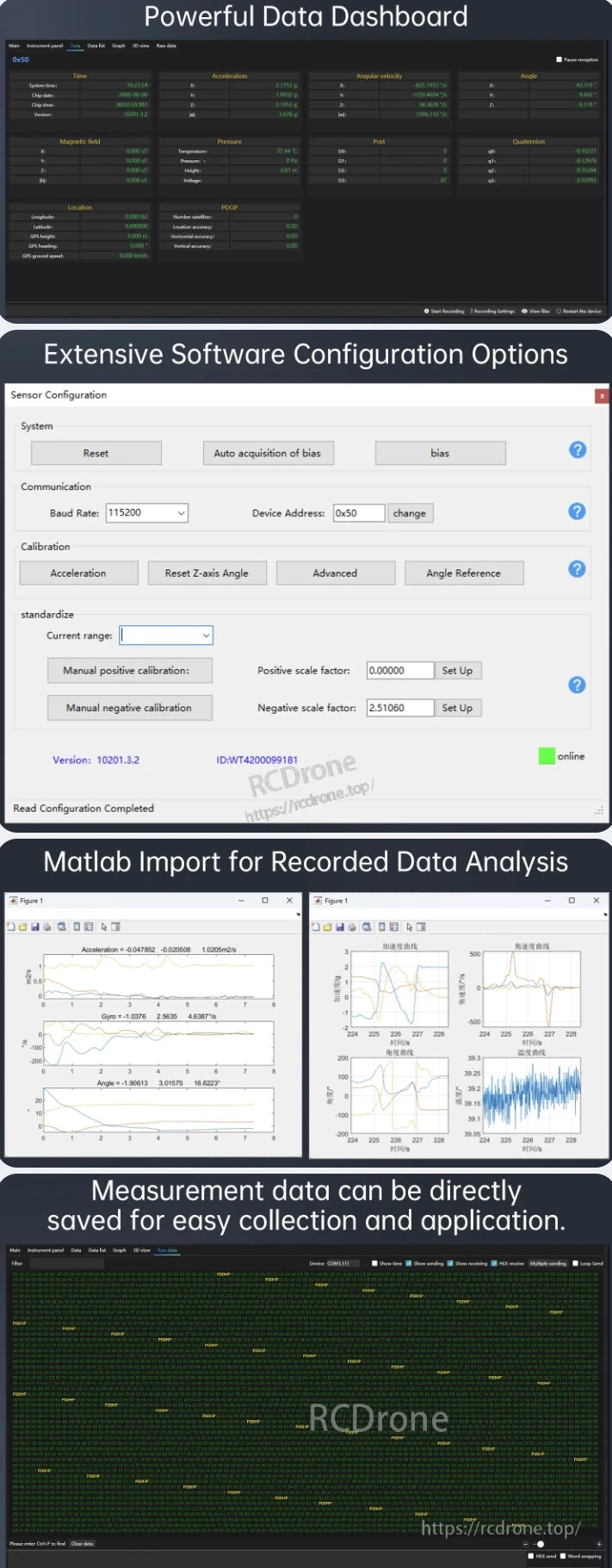
Потужна панель даних з показниками сенсорів у реальному часі, широкими можливостями програмного налаштування, імпортом MATLAB для аналізу та прямим збереженням даних для легкого збору та застосування.
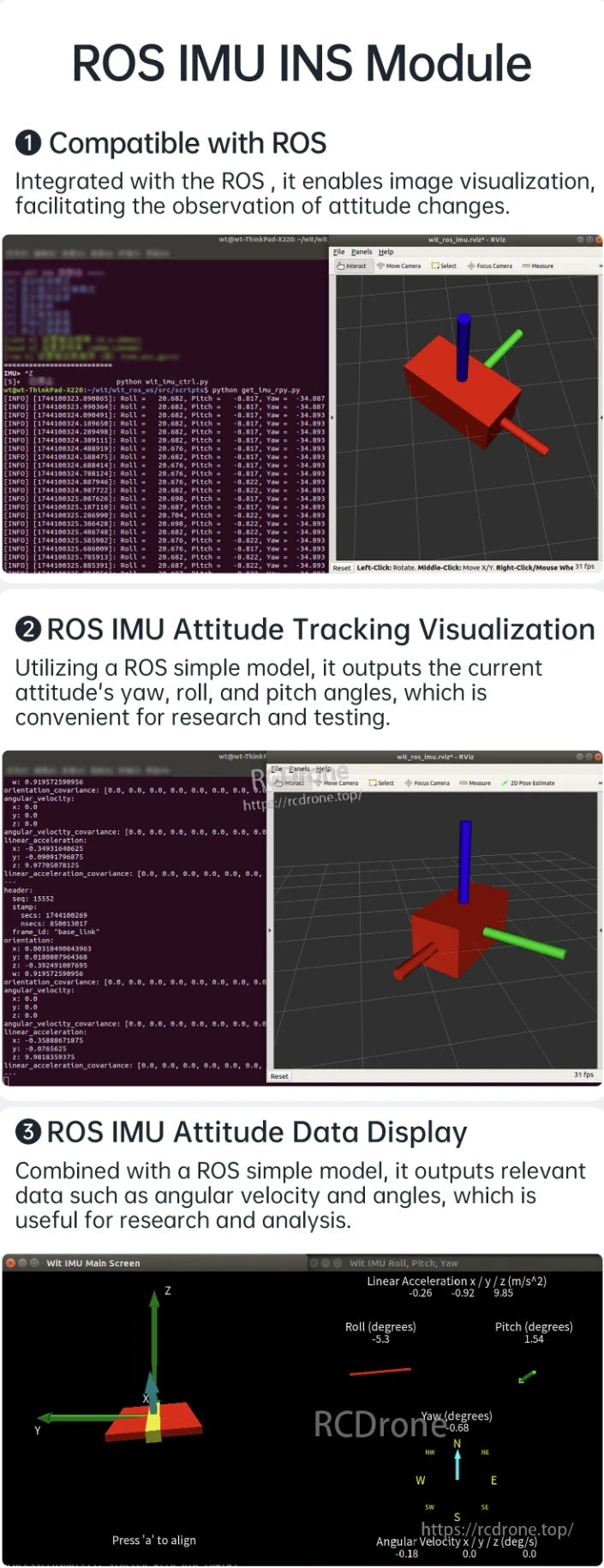
Модуль ROS IMU INS пропонує сумісність з ROS, візуалізує відстеження орієнтації та відображає дані про кут нахилу, крен, тангаж, кутову швидкість і лінійне прискорення в реальному часі для досліджень та аналізу.
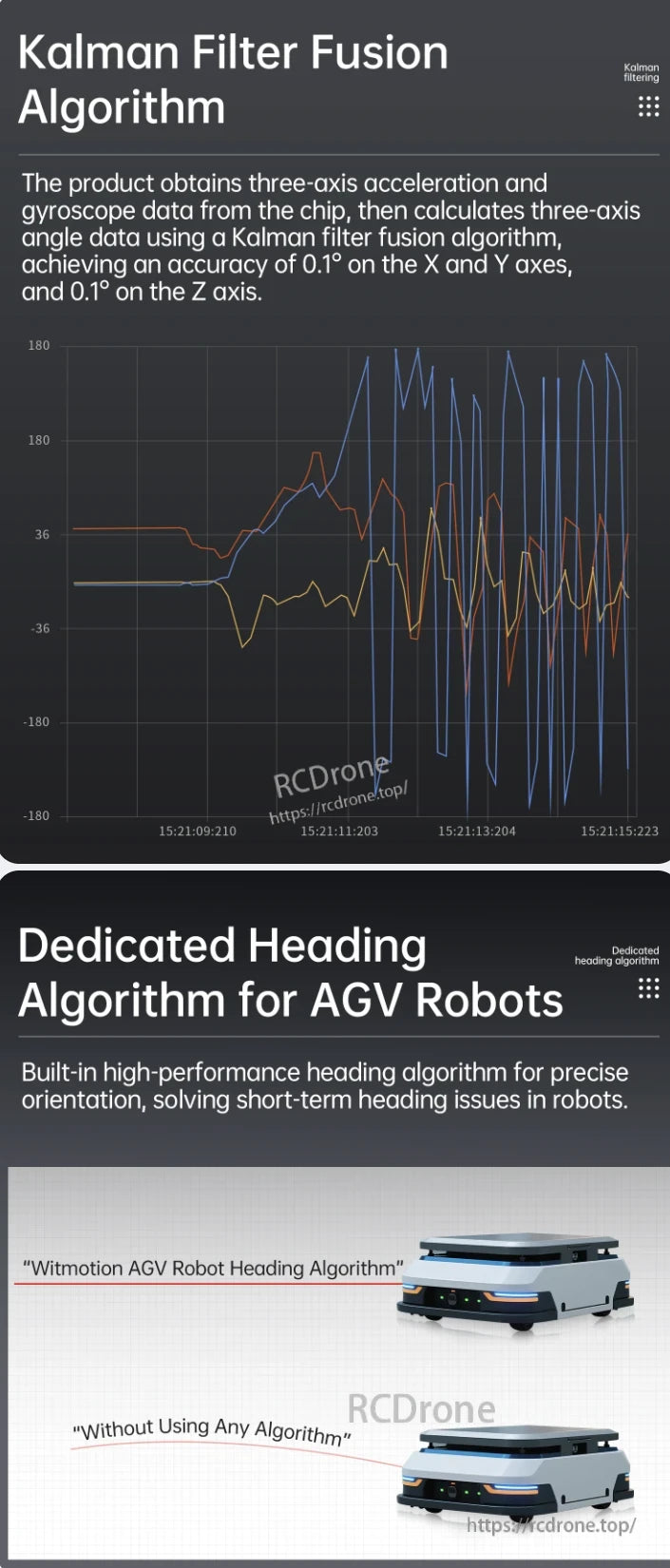
IMU WitMotion HWT601 AGV забезпечує точні дані про кути в 3 осях з точністю 0.1° за допомогою злиття фільтра Калмана. Його спеціалізований алгоритм орієнтації забезпечує стабільну орієнтацію робота, значно покращуючи продуктивність у порівнянні з системами без таких алгоритмів.
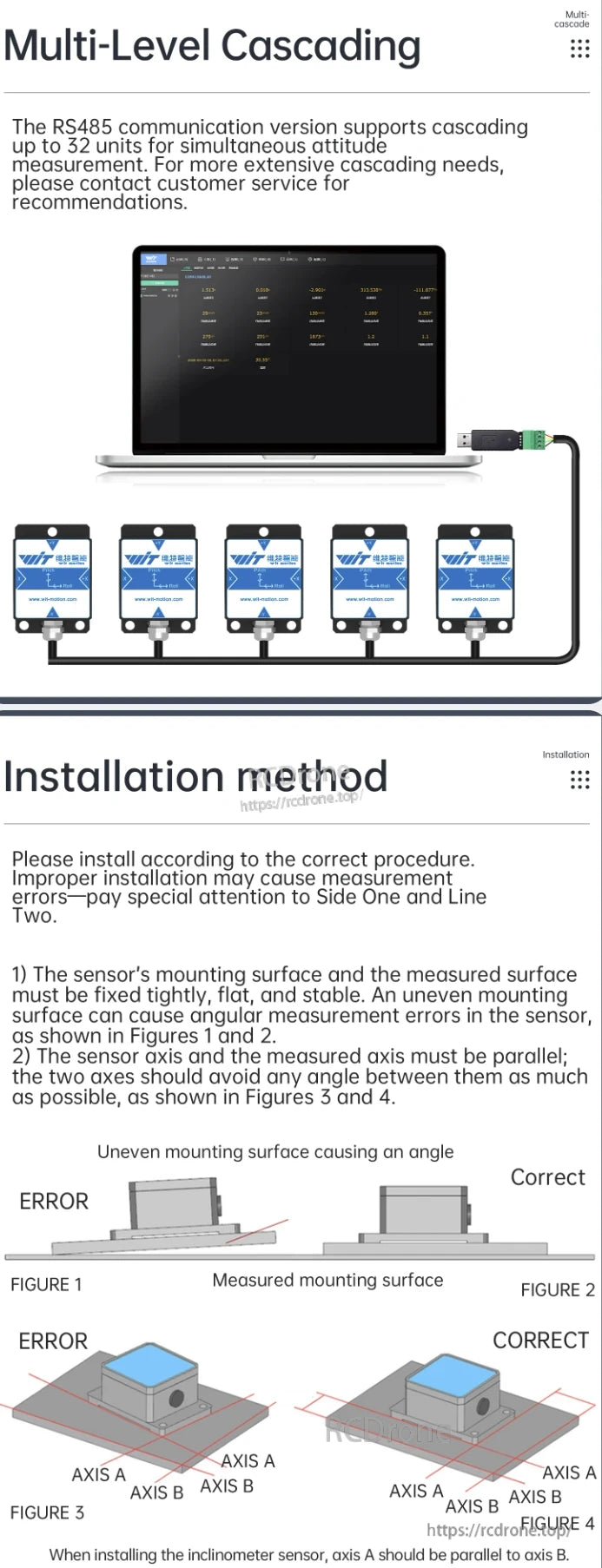
IMU WitMotion HWT601 AGV підтримує до 32 каскадних одиниць через RS485 для вимірювання орієнтації. Забезпечте рівну, стабільну установку та вирівняні осі для точності.
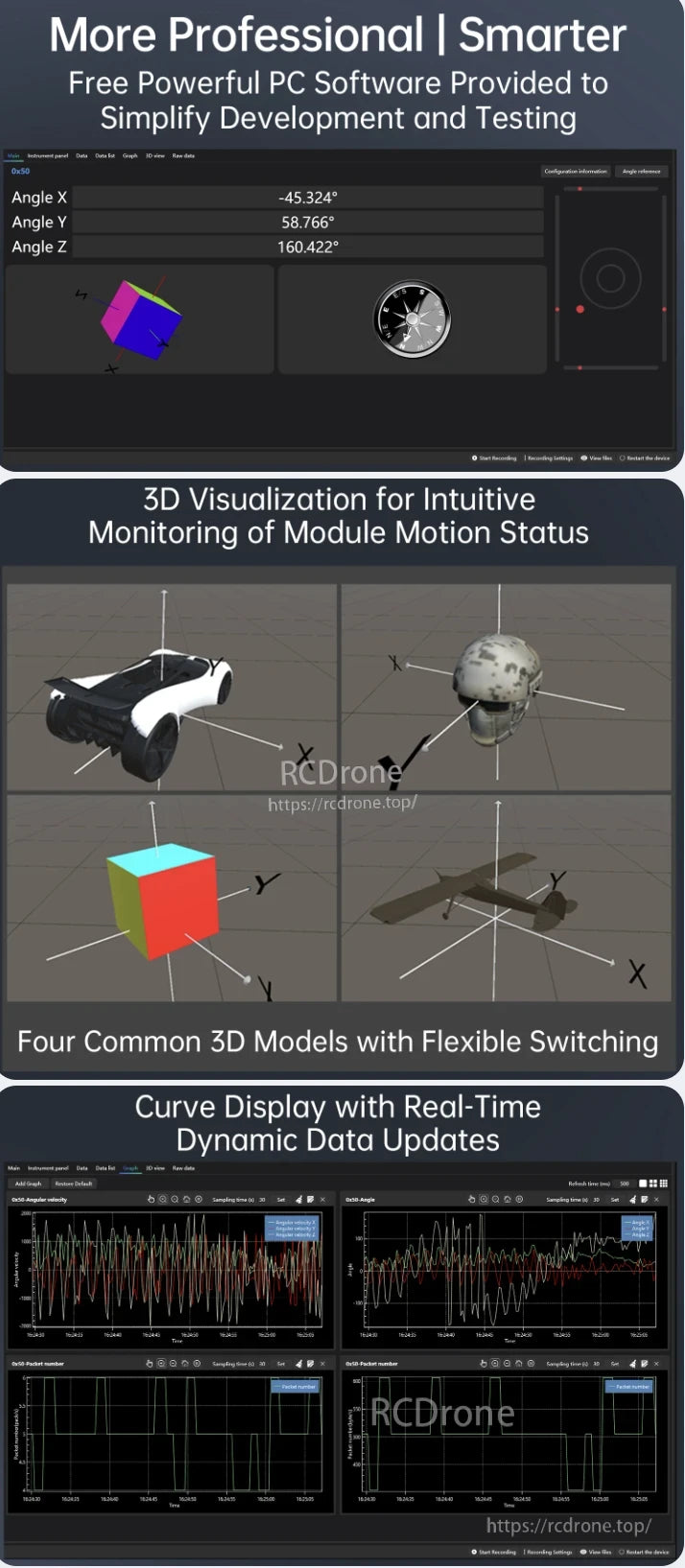
Професійне програмне забезпечення для ПК для IMU WitMotion HWT601 AGV пропонує візуалізацію в реальному часі в 3D, моніторинг кутів та динамічне відображення кривих.Особливості включають інтуїтивне відстеження руху, гнучке перемикання моделей та оновлення даних в реальному часі для ефективної розробки та тестування.
Документація підтримки включає приклади програм для STM32, Arduino, 51 UART, Windows C++ та Matlab, щоб допомогти розробникам застосовувати продукт за допомогою навчальних посібників та зразків коду.
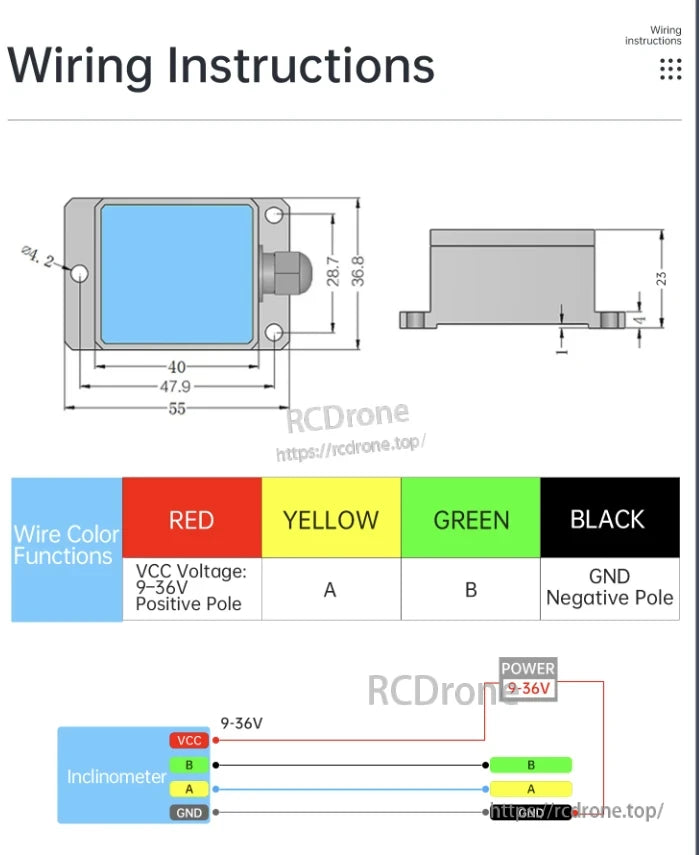
Посібник з підключення WitMotion HWT601 AGV IMU: червоний (9-36V), жовтий (A), зелений (B), чорний (GND). Розміри та схема підключення надані.

WitMotion HWT601 AGV IMU для дронів, автономного водіння, мобільних роботів та безпілотних логістичних транспортних засобів.
Related Collections








