Двовісний датчик кута WitMotion WT1-IMU (акселерометр + інклінометр), 3.3–5В TTL, точність 0.5°, вихід 20 Гц
Двовісний датчик кута WitMotion WT1-IMU (акселерометр + інклінометр), 3.3–5В TTL, точність 0.5°, вихід 20 Гц
WitMotion
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
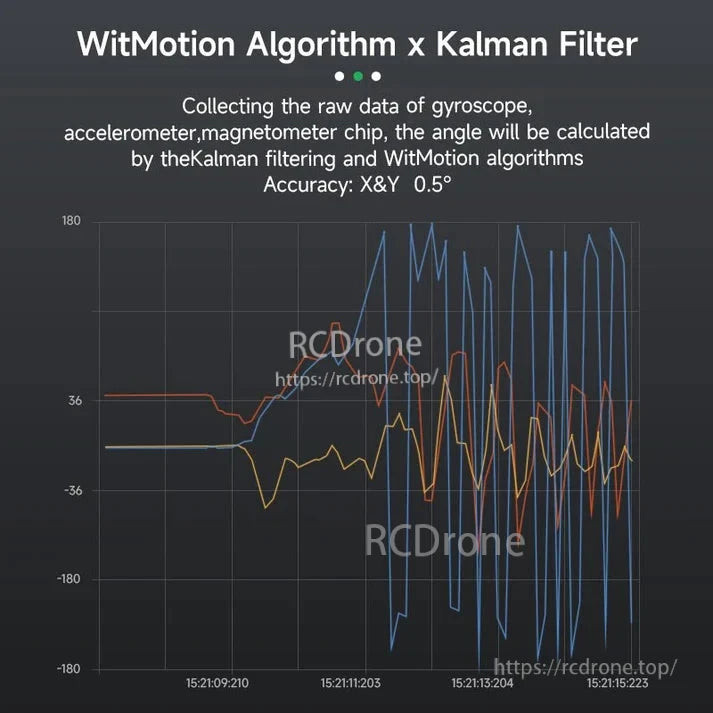
WitMotion WT1-IMU є надзвичайно економічним двохосьовим кутовим сенсором, який об'єднує дані акселерометра/гіроскопа/магнітометра за допомогою алгоритму на основі фільтра Калмана для виведення X/Y кута в реальному часі. Модуль працює при 3.3–5 V, спілкується через TTL серійний інтерфейс і побудований на компактній платі з золотим покриттям для легкого SMT інтегрування. Типова точність кута становить ±0.5° (X & Y) з 20 Гц стандартною швидкістю повернення. Офіційне програмне забезпечення для ПК надає інформаційні панелі, калібрування, ведення журналу та експорт; SDK/приклади підтримують MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino та C/C#.
Ключові особливості
-
Вихід кута по двох осях (X, Y) для вимірювання положення/нахилу
-
Фільтр Калмана + алгоритм злиття WitMotion для високої стабільності
-
Живлення: 3.3–5 V, TTL UART; LDO вбудований
-
Точність: ±0.5° (X & Y)
-
Діапазон кутів: X ±180°, Y ±90°
-
Стандартна частота повернення: 20 Гц (налаштовується в програмному забезпеченні)
-
Споживана потужність: тип. ~5 мА, <10 мА
-
Компактний 15.24 × 15.24 мм модуль; позолочені отвори для штампів
-
Безкоштовне ПЗ для ПК: панель управління, калібрування, налаштування смуги пропускання/швидкості, запис даних &та відтворення, експорт у TXT/BIN/PLAY/XLS
-
Аксесуари/пристрої: необов'язковий адаптер USB-to-TTL та пристрій для тестового спалювання для легкого запуску
Специфікації
| Товар | Значення |
|---|---|
| Модель | WT1-IMU |
| Напруга | 3.3–5 V |
| Інтерфейс | TTL UART |
| Вихідний контент | Кут 2-осі (X, Y) |
| Діапазон кутів | X: ±180°;Y: ±90° |
| Кутова точність | X/Y: ±0.5° |
| Типова частота повернення | 20 Гц |
| Швидкість передачі | 9600 (20 Гц вихід за замовчуванням) |
| Струм | тип. 5 мА; <10 мА |
Розміри &і осі
| Розмір (мм) | Значення |
|---|---|
| A | 15.24 |
| B | 15.24 |
| C | 2.54 |
| D | 12.7 |
| E (висота) | 2 |
Визначення осі: X вправо, Y вгору, Z назовні від плати; обертання слідує правилу правої руки.
Вивід (12-контактний штампований отвір)
| Номер | Контакт | Функція |
|---|---|---|
| 1 | D0 | NC (резерв) |
| 2 | VCC | 3.3–5 V вхід |
| 3 | RX | Серійні дані вхід (TTL) |
| 4 | TX | Серійні дані вихід (TTL) |
| 5 | GND | Заземлення |
| 6 | SWIM | Інтерфейс даних SWIM |
| 7 | D3 | NC (резерв) |
| 8 | GND | Заземлення |
| 9 | SDA | NC (резерв) |
| 10 | SCL | NC (резерв) |
| 11 | VCC | 3.3–5 V вхід |
| 12 | D2 | NC (резерв) |
З'єднання MCU: TTL послідовний; перехресне з'єднання TX↔RX (MCU-TX → WT1-IMU RX, MCU-RX → WT1-IMU TX), VCC та GND спільні.
Програмне забезпечення &та Розробка
-
Панель управління: живий перегляд кута, прискорення, кутової швидкості, магнітного поля, кватерніона тощо.
-
Меню налаштувань: калібрування прискорення &та магнітне, напрямок розміщення, частота/ширина смуги виходу, швидкість передачі, режим сну.
-
Запис/Експорт: швидко реєструйте та експортуйте в TXT/BIN/PLAY або вставте в Excel (XLS).
-
Інструменти: приклади/SDK для MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, C/C#.
-
Додаткова тестова установка для простого підключення та прошивки/налаштування.
Типові застосування
Гарнітура з дисплеєм, відстеження руху, робототехніка, AGV/UGV, безпілотне водіння, моніторинг нахилу в гірництві/вежах/промисловості, автоматизаційне обладнання, дослідження та розробки пілотованих літальних апаратів R&D, моніторинг безпеки та розумні/автоматизовані ферми.
Деталі

Двохосевий кутовий датчик, економічний, стабільний, з алгоритмом фільтра Калмана, сертифікований ISO9001.
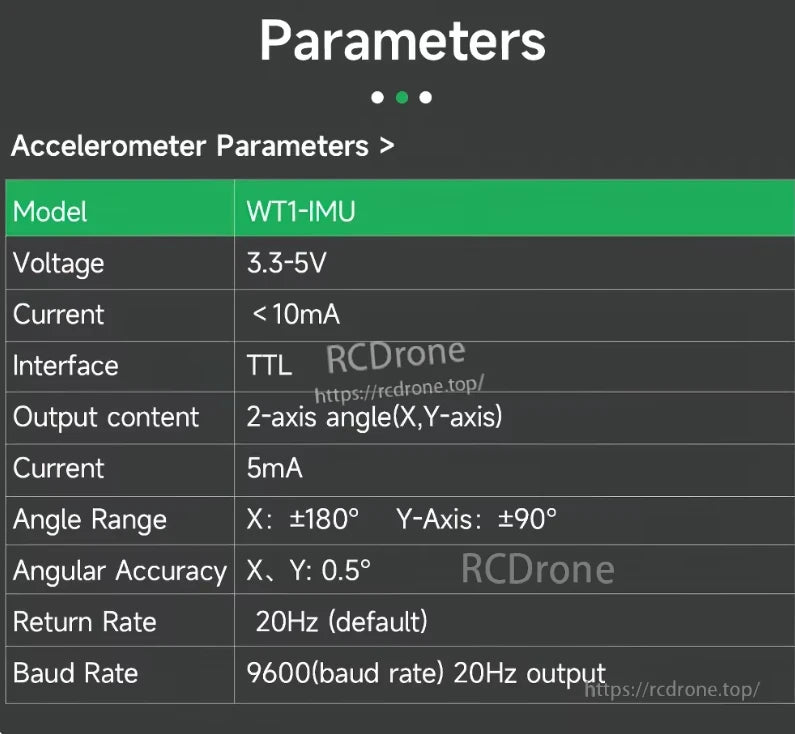
WT1-IMU акселерометр працює при 3.3-5V, <10mA струм, TTL інтерфейс. Виводить кути по 2 осям (X: ±180°, Y: ±90°) з точністю 0.5°. Стандартна частота повернення 20Гц, швидкість передачі 9600.
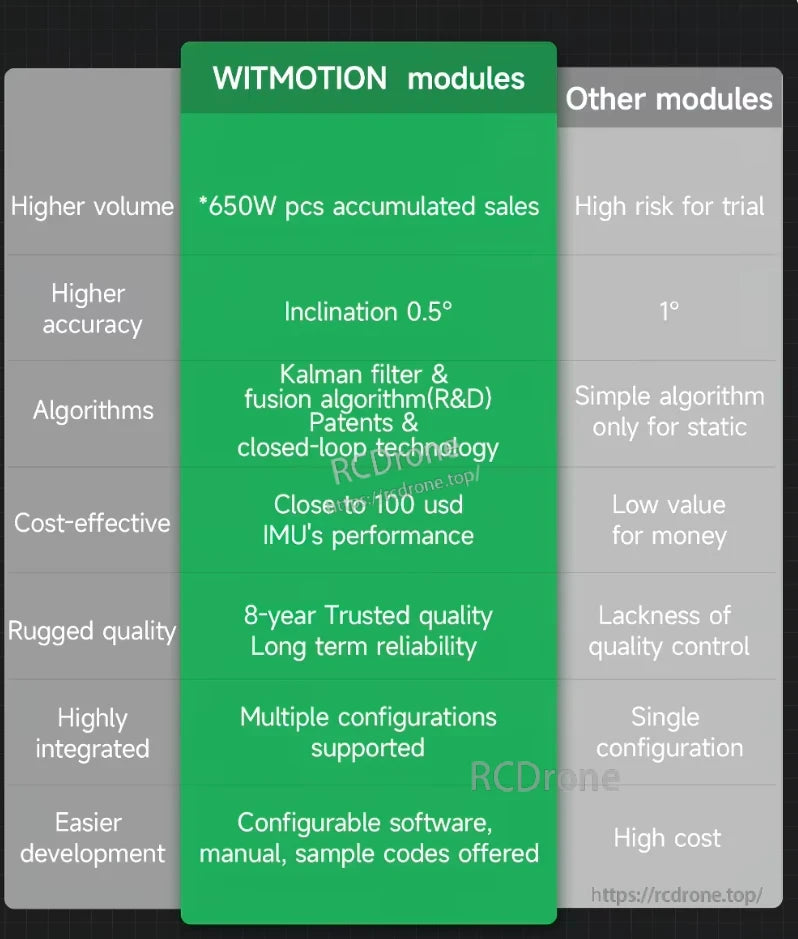
Модулі WitMotion забезпечують високу продуктивність, точність та економічність з міцним дизайном, численними конфігураціями та простотою розробки. Вони включають 650W продажів, 0.5° нахил, фільтр Калмана, технологію замкнутого контуру та налаштовуване програмне забезпечення. Інші модулі пропонують нижчу продуктивність, менше функцій та вищий ризик.
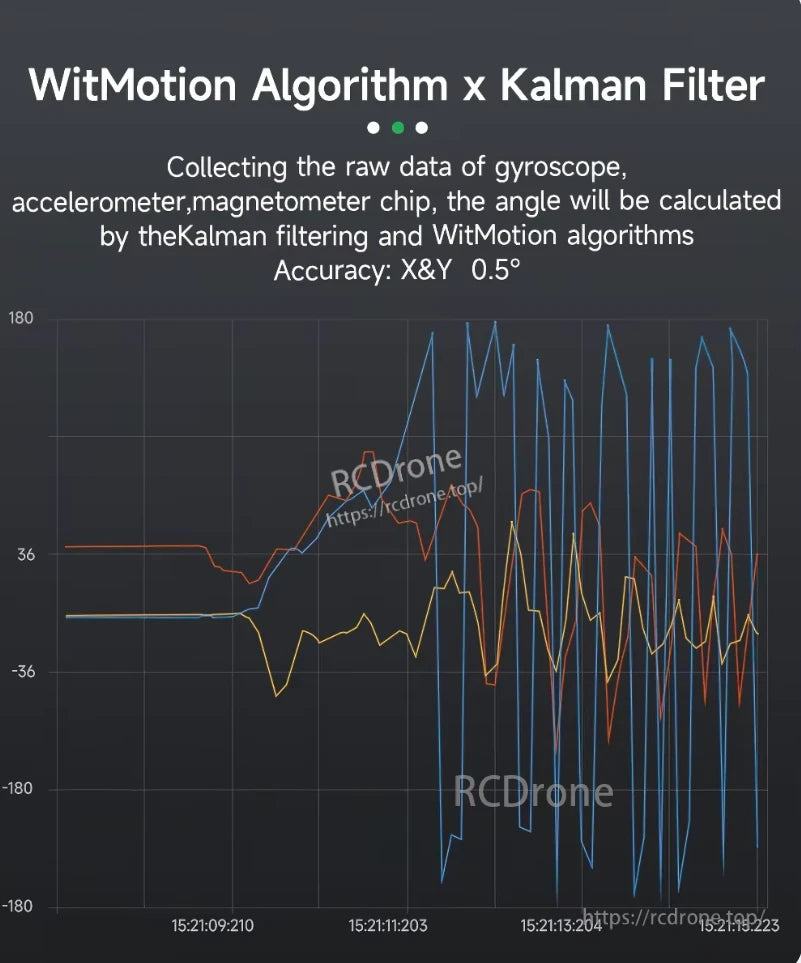
Алгоритм WitMotion x Фільтр Калмана. Збирає сирі дані з гіроскопа, акселерометра, магнітометра. Обчислює кут за допомогою фільтрації Калмана та алгоритмів WitMotion. Точність: X&Y 0.5°.
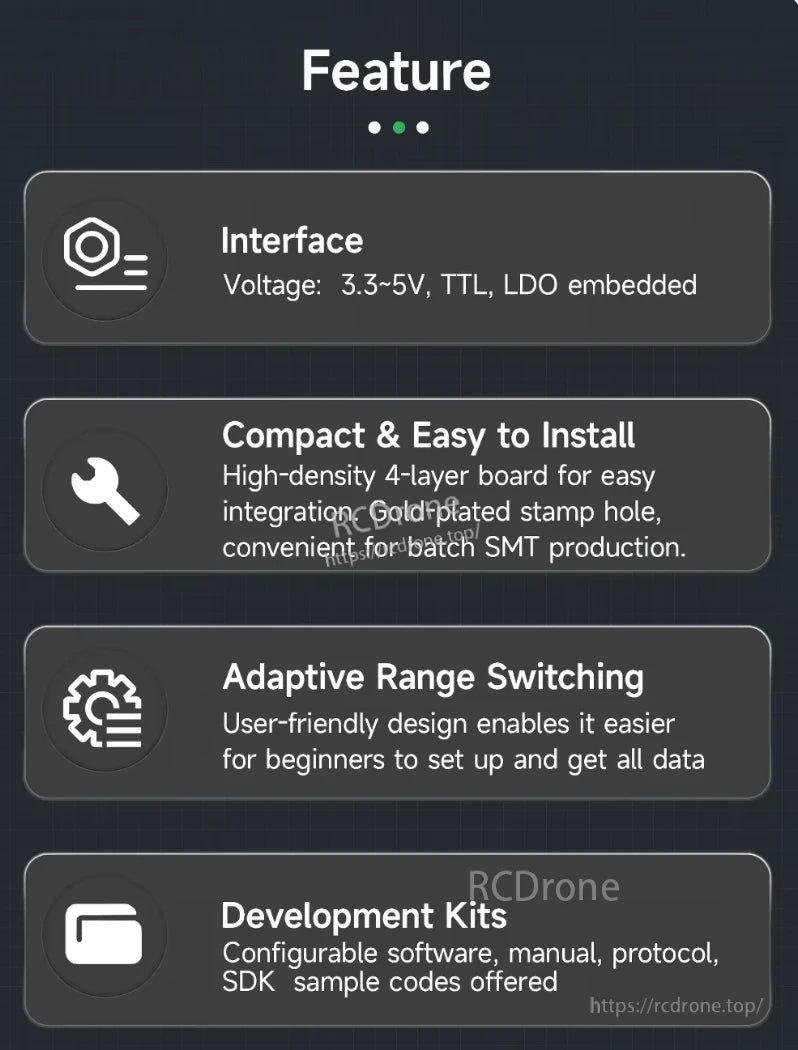
Інтерфейс: 3.3~5V, TTL, вбудований LDO. Компактний & легкий для встановлення з високощільною 4-шаровою платою та позолоченими штампованими отворами. Адаптивне перемикання діапазону для початківців. Набори для розробки включають програмне забезпечення, посібник, протокол, SDK та зразки коду.
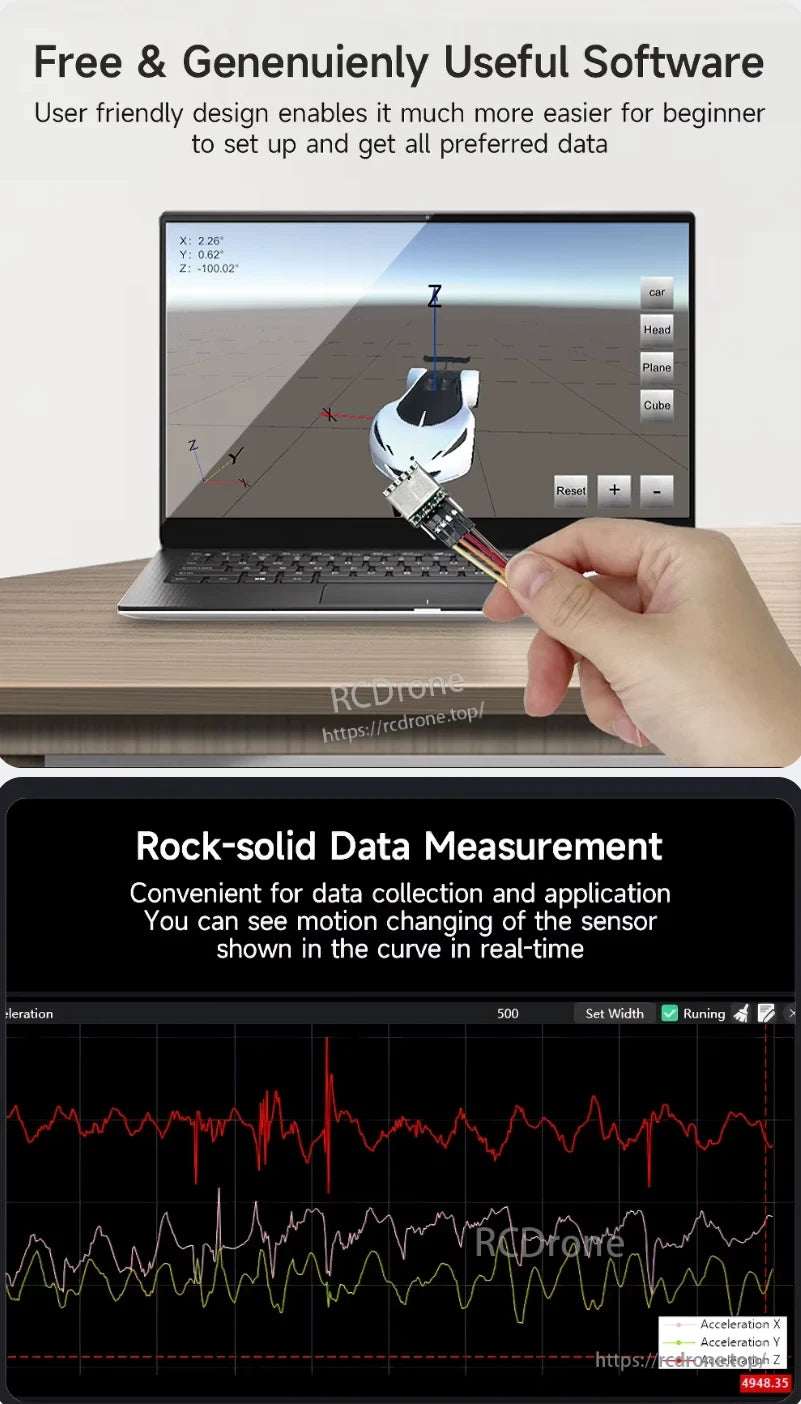
Безкоштовне &та дійсно корисне програмне забезпечення пропонує зручний дизайн для легкого налаштування та отримання даних. Відстеження руху в реальному часі з надійними вимірюваннями даних відображає зміни прискорення по осях X, Y, Z через динамічні криві.
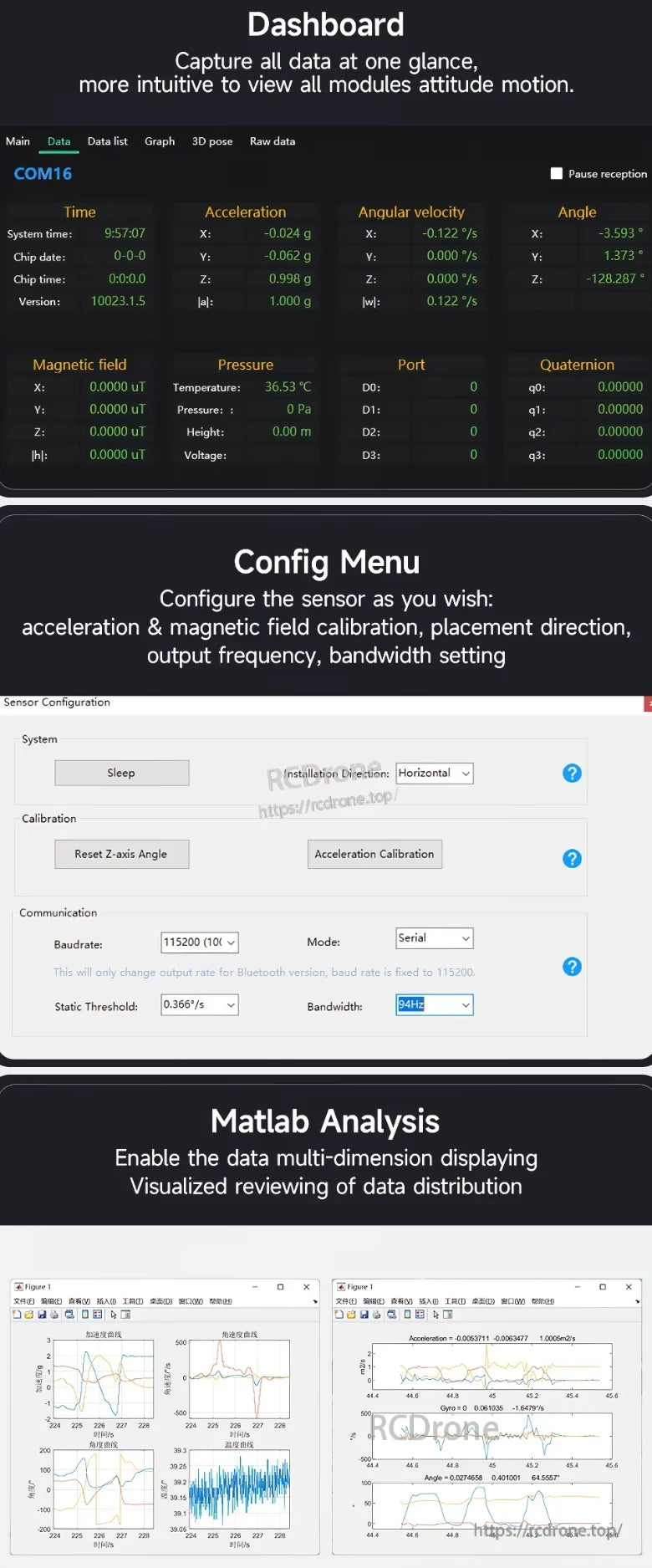
Панель приладів відображає дані сенсорів у реальному часі, включаючи прискорення, кутову швидкість, кут, магнітне поле, тиск та кватерніон. Меню налаштувань дозволяє калібрування, напрямок установки, налаштування швидкості передачі та ширини смуги. Аналіз Matlab дозволяє візуалізацію багатовимірних даних.
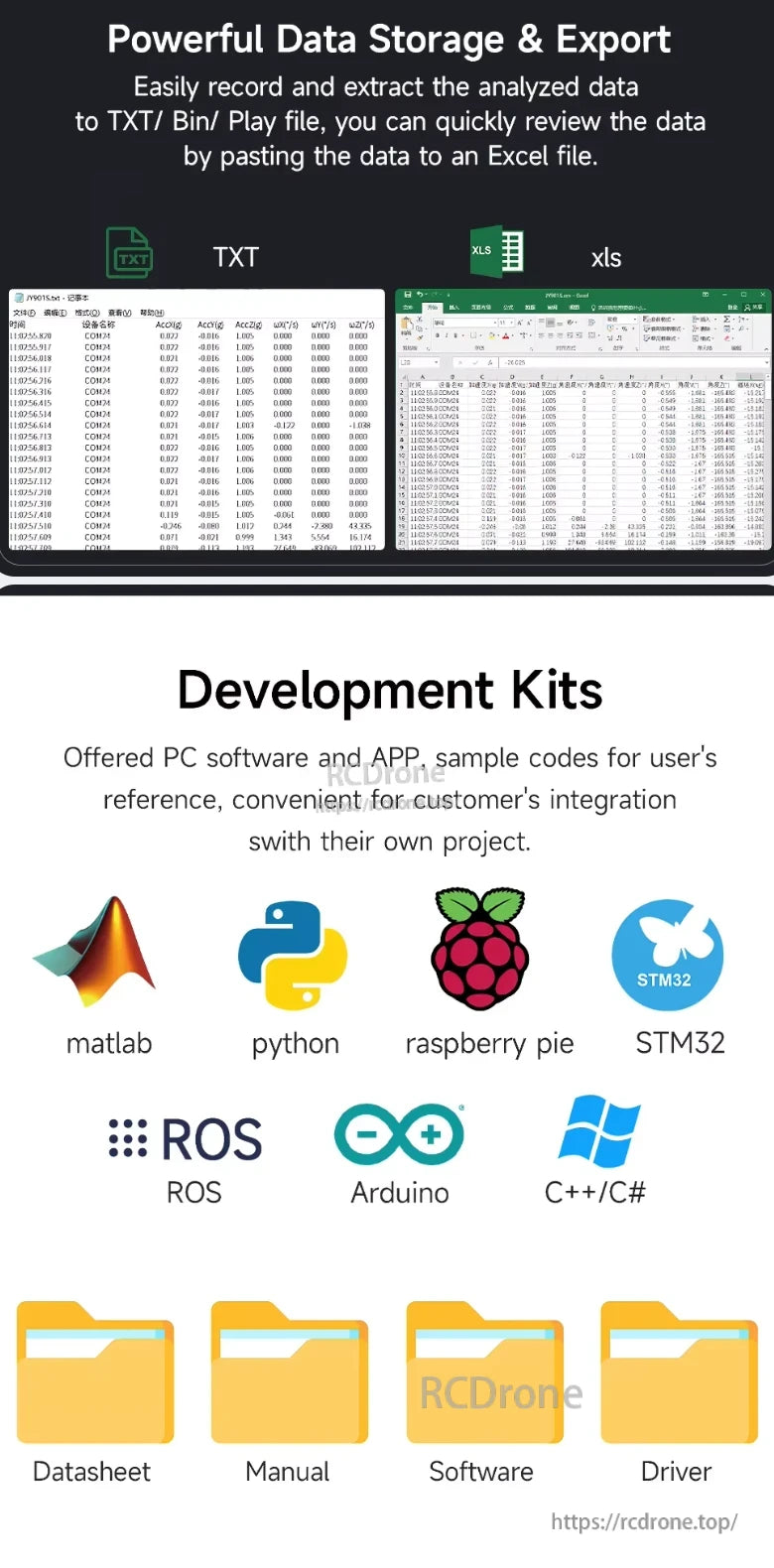
Потужне зберігання даних та експорт у TXT, BIN або Play файли; сумісно з MATLAB, Python, Raspberry Pi, STM32, ROS, Arduino, C++/C#. Включає технічний лист, посібник, програмне забезпечення та драйвер для легкої інтеграції.
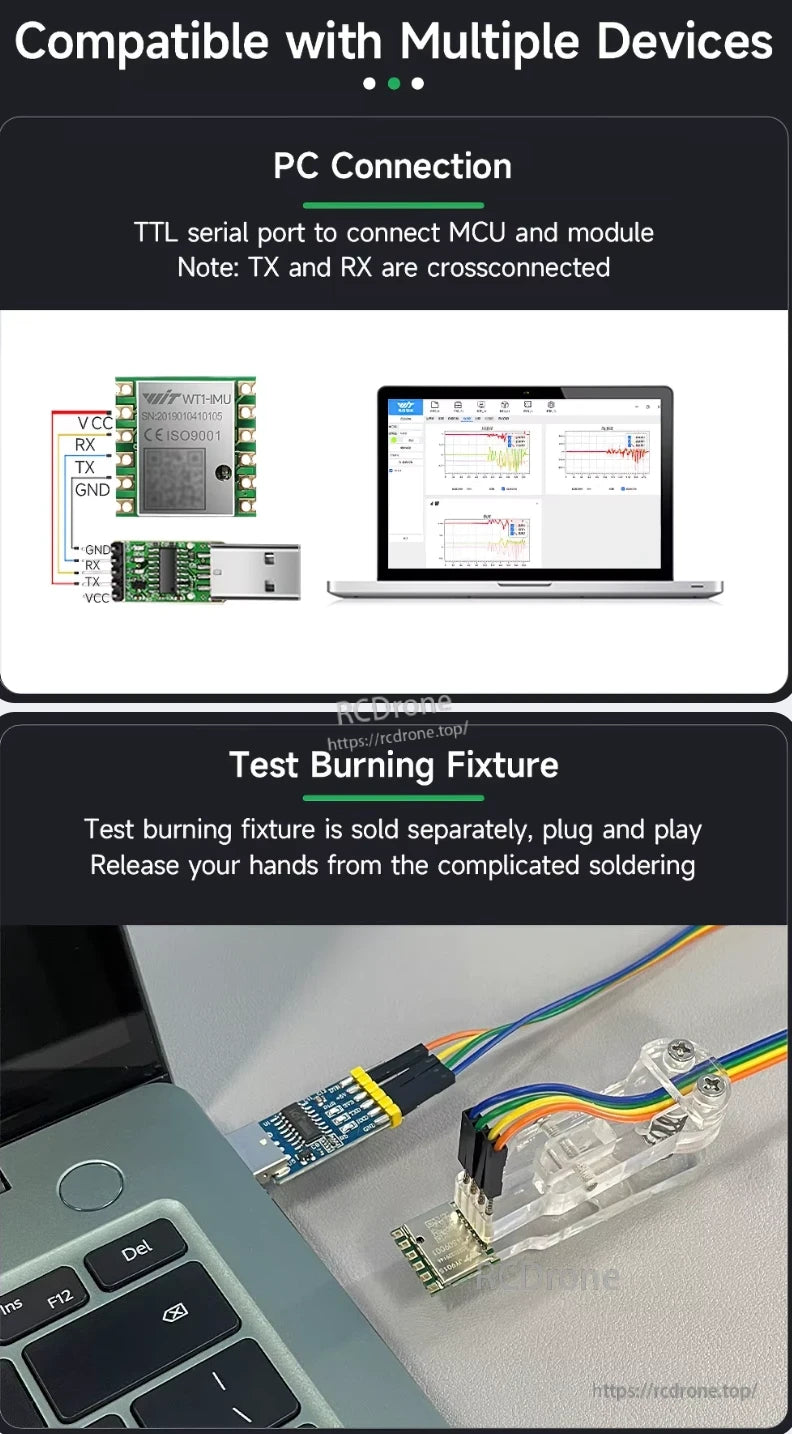
WitMotion WT1-IMU підтримує підключення до ПК через TTL послідовний порт з перехресно з'єднаними TX та RX.Сумісний з кількома пристроями. Тестовий палаючий пристрій продається окремо, підключай і працюй для легкого налаштування без пайки.
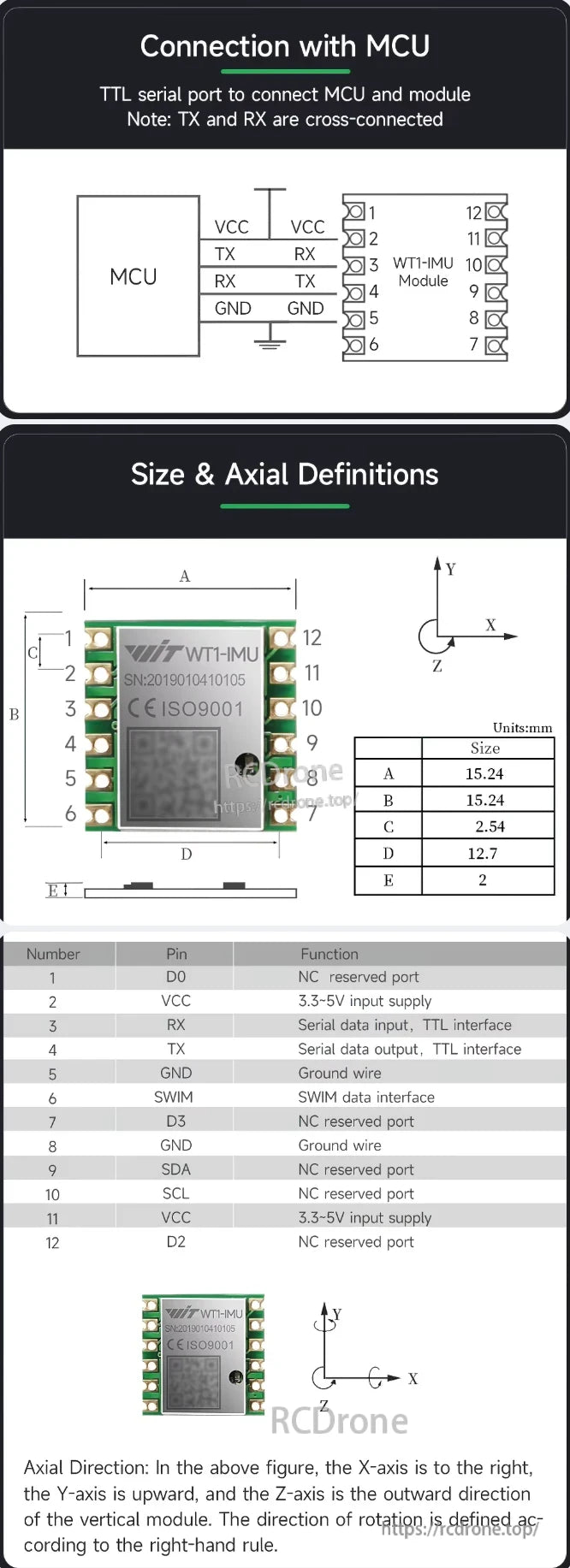
Двохосний кутовий сенсор WitMotion WT1-IMU пропонує TTL послідовне з'єднання, 12-контактну конфігурацію, компактний розмір 15.24×15.24×2.54 мм, осі за правилом правої руки та включає контакти VCC, GND, TX, RX, SWIM, SDA, SCL.

Застосування IMU сенсора: гірництво, сільське господарство, робототехніка, вежі, автоматизація, дрони, відстеження, моніторинг.
Related Collections