Високоточний акселерометр WitMotion WT61C (MPU6050) – 6-осьовий Acc+Gyro+Angle AHRS IMU для Arduino / TTL & RS232
Високоточний акселерометр WitMotion WT61C (MPU6050) – 6-осьовий Acc+Gyro+Angle AHRS IMU для Arduino / TTL & RS232
WitMotion
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
WitMotion WT61C є економічно вигідним 6-осевим AHRS IMU, який об'єднує 3-осевий акселерометр і 3-осевий гіроскоп для виведення прискорення, кутової швидкості та 3-осевого кута (похилий/тангаж/курс). Завдяки алгоритму злиття WitMotion (Калмана), він забезпечує статичну точність кута XY 0.05° (0.1° динамічна), що робить його ідеальним для виявлення нахилу, вібрації та орієнтації в вбудованих проектах, робототехніці, автоматизації, вирівнювальних платформах та інтеграціях VR/AR. Він підтримує TTL (3.3–5 V) та RS232 (5–36 V) послідовні інтерфейси і безперешкодно працює з Arduino, STM32, C/C++ та MATLAB за допомогою наданого SDK та інструментів для ПК.
Ключові особливості
-
6-осеві виходи: 3-осеве прискорення, 3-осева кутова швидкість, плюс 3-осевий кут.
-
Висока точність: статичний XY 0.05°, динамічний 0.1°; стабільність прискорення 0.01 g.
-
Широкі діапазони: Прискорення ±16 g; Гіроскоп ±2000 °/с; Кут X/Z ±180°, Y 90°.
-
Регульована швидкість виходу: 0.2–100 Гц; швидкість передачі 9600 / 115200 біт/с.
-
Подвійний інтерфейс: TTL 3.3–5 V або RS232 5–36 V для легкої інтеграції з MCU/промисловістю.
-
Алгоритм злиття WitMotion: Фільтрація Калмана з компенсацією дрейфу для стабільної орієнтації.
-
Конфігурований через програмне забезпечення: Калибрування прискорення, орієнтація розміщення, смуга пропускання, швидкість виходу, скидання осі Z до 0°.
-
Ресурси для розробників: Безкоштовне програмне забезпечення для Windows PC (MiniIMU.exe), драйвери (CH340/CP2102), посібник &та технічні характеристики, SDK для 51 серійний, C/C++, STM32, Arduino, MATLAB, а також додаток для Android і демонстраційні відео.
-
Інструменти для роботи з даними: Перегляд сирих даних, графіки в реальному часі, експорт TXT, а також демонстрація 3D руху (код джерела доступний за запитом).
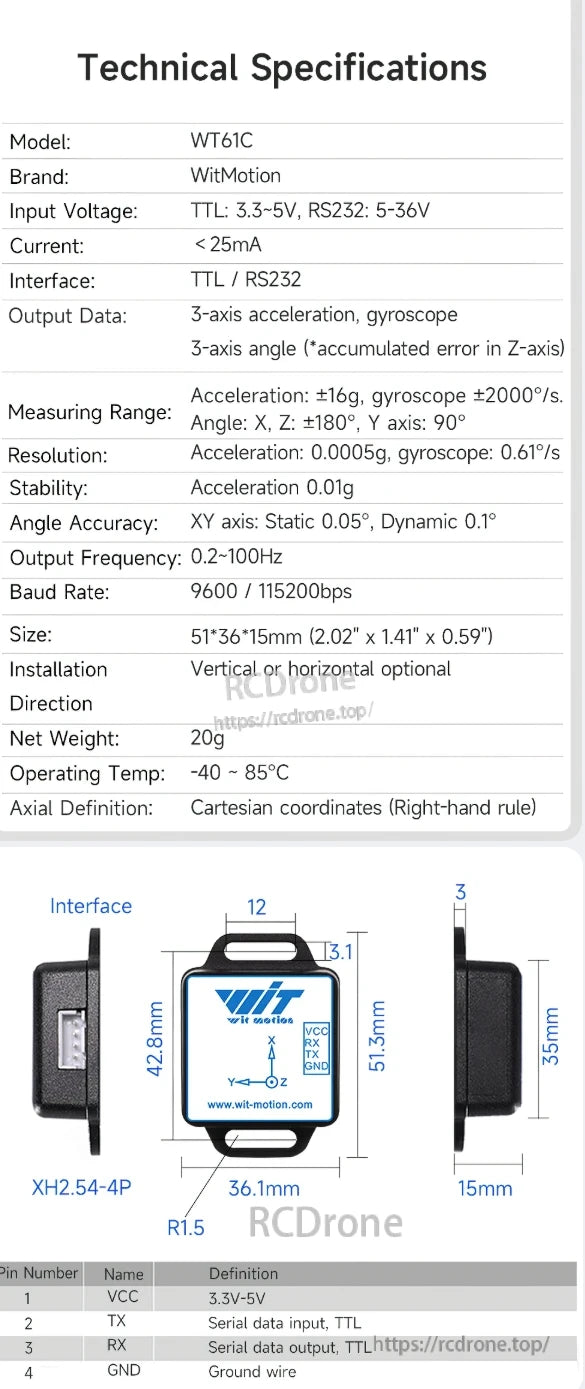
Технічні характеристики
-
Модель: WT61C
-
Бренд: WitMotion
-
Вхідна напруга: TTL: 3.3–5 V; RS232: 5–36 V
-
Потужність: < 25 mA
-
Інтерфейс: TTL / RS232
-
Вихідні дані: 3-осеве прискорення, 3-осевий гіроскоп, 3-осевий кут (накопичена помилка по осі Z)
-
Діапазон вимірювання: Прискорення ±16 g; Гіроскоп ±2000 °/с; Кут X/Z ±180°, Y 90°
-
Роздільна здатність: Прискорення 0.0005 g; Гіроскоп 0.61 °/с
-
Стабільність: Прискорення 0.01 g
-
Точність кута: XY статичний 0.05°, динамічний 0.1°
-
Частота виходу: 0.2–100 Гц
-
Швидкість передачі: 9600 / 115200 біт/с
-
Розмір: 51 × 36 × 15 мм (≈ 2.02″ × 1.41″ × 0.59″)
-
Встановлення: Вертикальне або горизонтальне
-
Чиста вага: 20 г
-
Температура експлуатації: −40 ~ 85 °C
-
Визначення осі: Декартові координати, правило правої руки
Розпіновка (XH2.54-4P, TTL)
-
VCC — 3.3–5 V
-
TX — Послідовні дані вхід, TTL
-
RX — Послідовні дані вихід, TTL
-
GND — Земля
Протокол виходу кута (заголовок кадру 0x55 0x53)
| Індекс | Байт | Значення |
|---|---|---|
| 0 | 0x55 | Заголовок |
| 1 | 0x53 | Ідентифікація як кут пакет |
| 2 | RollL | Низький байт кута по осі X |
| 3 | RollH | Високий байт кута по осі X |
| 4 | PitchL | Низький байт кута по осі Y |
| 5 | PitchH | Y-axis angle high byte |
| 6 | YawL | Z-axis angle low byte |
| 7 | YawH | Z-axis angle high byte |
| 8 | VL | Версія прошивки низька |
| 9 | VH | Версія прошивки висока |
| 10 | Сума | Контрольна сума |
Декодування кута (°):
-
Roll = ((RollH<<8)|RollL) / 32768 * 180 -
Pitch = ((PitchH<<8)|PitchL) / 32768 * 180 -
Yaw = ((YawH<<8)|YawL) / 32768 * 180
Контрольна сума:Сума = 0x55 + 0x53 + RollH + RollL + PitchH + PitchL + YawH + YawL + VH + VL
(Пакети прискорення та кутової швидкості мають подібний формат.)
Програмне забезпечення &та інтеграція
-
Інструменти Windows показують сирі кадри, розібрані дані, живі графіки та вимірювачі положення; підтримують запис &та експорт TXT.
-
3D демонстрація візуалізує рух; вихідний код може бути наданий.
-
З'єднання MCU: прямий серійний зв'язок з Arduino/MCU; TTL рекомендується для простішої інтеграції.
Типові застосування
-
Автоматизація &та робототехніка, моніторинг кута нахилу, вирівнювальні платформи, моніторинг вібрацій, промислове тестування, інтеграція IoT, VR/AR гарнітури.
Деталі

Економічний IMU з точністю 0.05° по осям X Y.Особливості включають нахил, вібрацію та визначення положення за допомогою алгоритму злиття WitMotion. Включає в себе функції прискорення, гіроскопа, кута, вібрації, фільтрації Калмана та мікроконтролера.
Датчик WitMotion WT61C пропонує 3-осеве прискорення та гіроскоп з діапазоном ±16g/±2000°/с, роздільною здатністю 0.0005g, інтерфейсом TTL/RS232, швидкістю передачі 9600/115200bps, робочою температурою від -40°C до 85°C та розмірами 51.3×36.1×15мм.
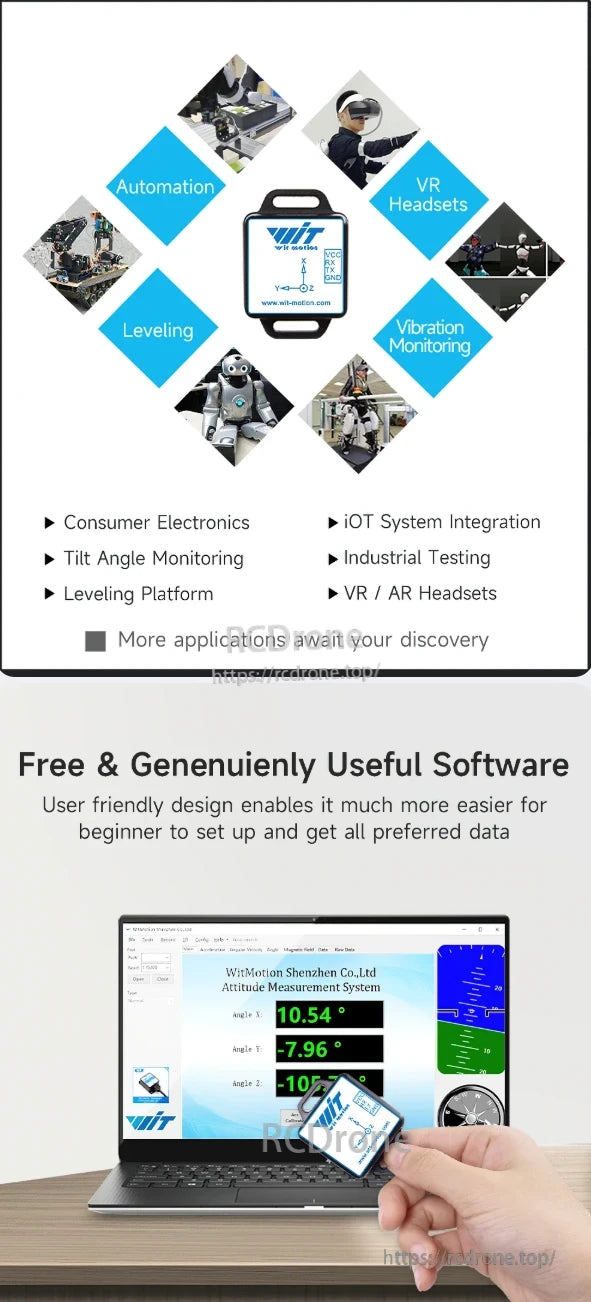
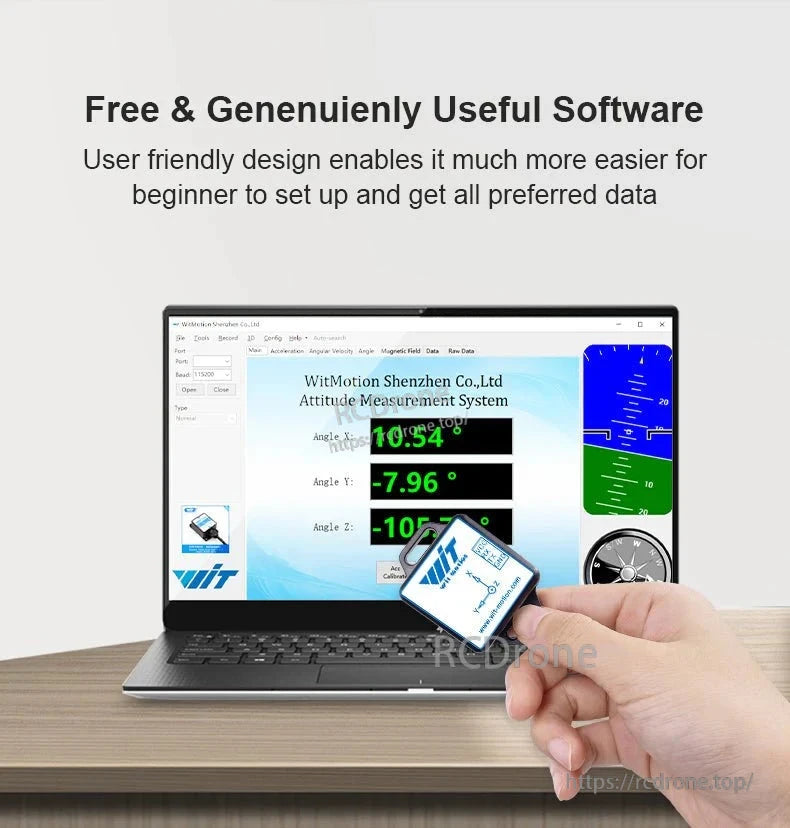
Датчик прискорення WitMotion WT61C дозволяє автоматизацію, VR-гарнітури, вирівнювання та моніторинг вібрації. Має безкоштовне програмне забезпечення для легкого налаштування, відображаючи дані про положення в реальному часі з зручним інтерфейсом для споживчої електроніки, IoT, промислових випробувань та інших застосувань.
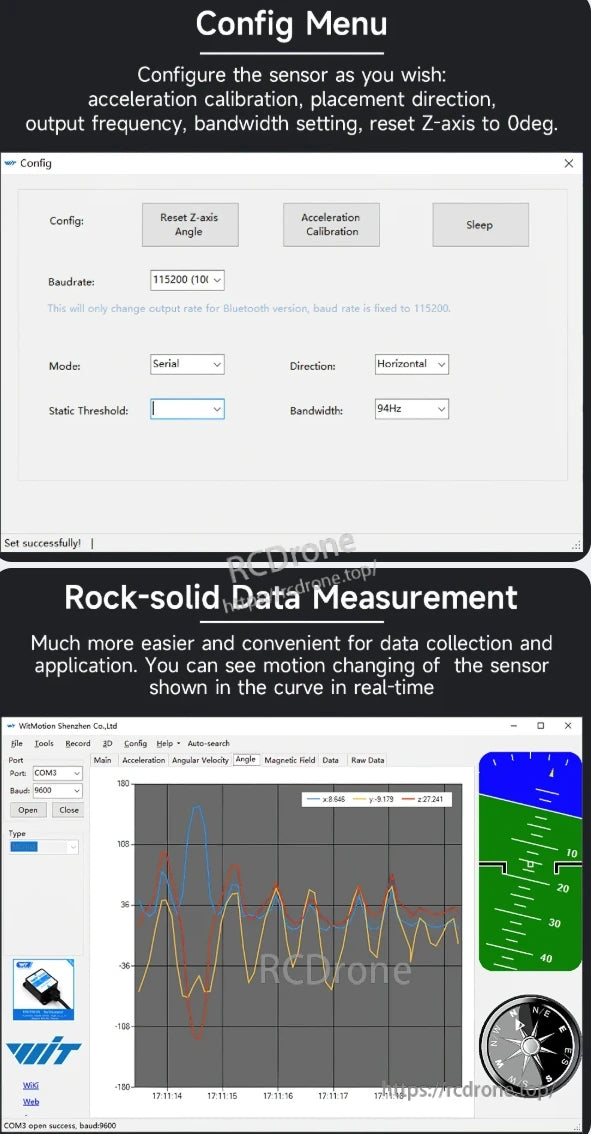
Конфігурований датчик з калібруванням прискорення, налаштуванням напрямку та вимірюванням даних в реальному часі.Особливості включають скидання по осі Z, регулювання смуги пропускання та відображення кривої руху в реальному часі для точного моніторингу та аналізу.
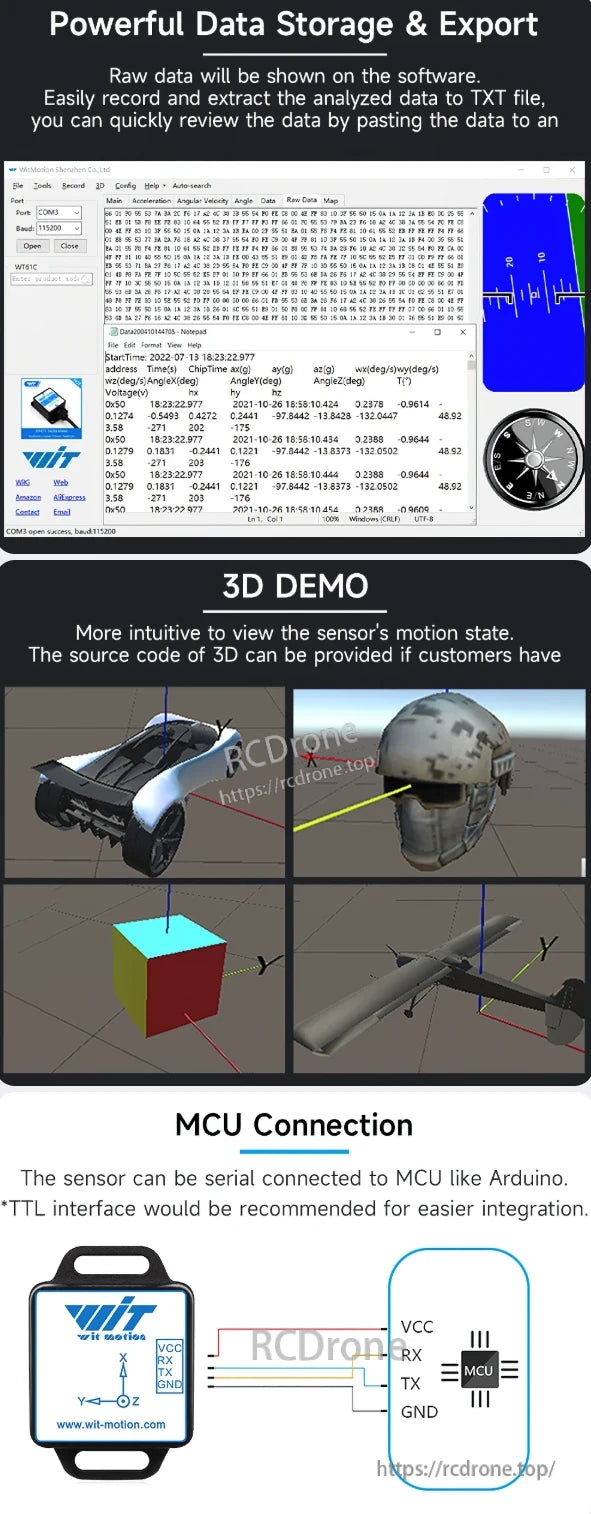
WitMotion WT61C пропонує високу точність виявлення руху з експортом даних у TXT файли, 3D візуалізацію для інтуїтивного аналізу руху та легку інтеграцію з MCU через TTL інтерфейс.

Розробницькі набори для WitMotion WT61C включають програмне забезпечення, драйвери та документацію для STM32, Arduino, Windows та Matlab. Включає SDK, посібники, технічні характеристики, демонстраційні відео та підтримку Android додатків.
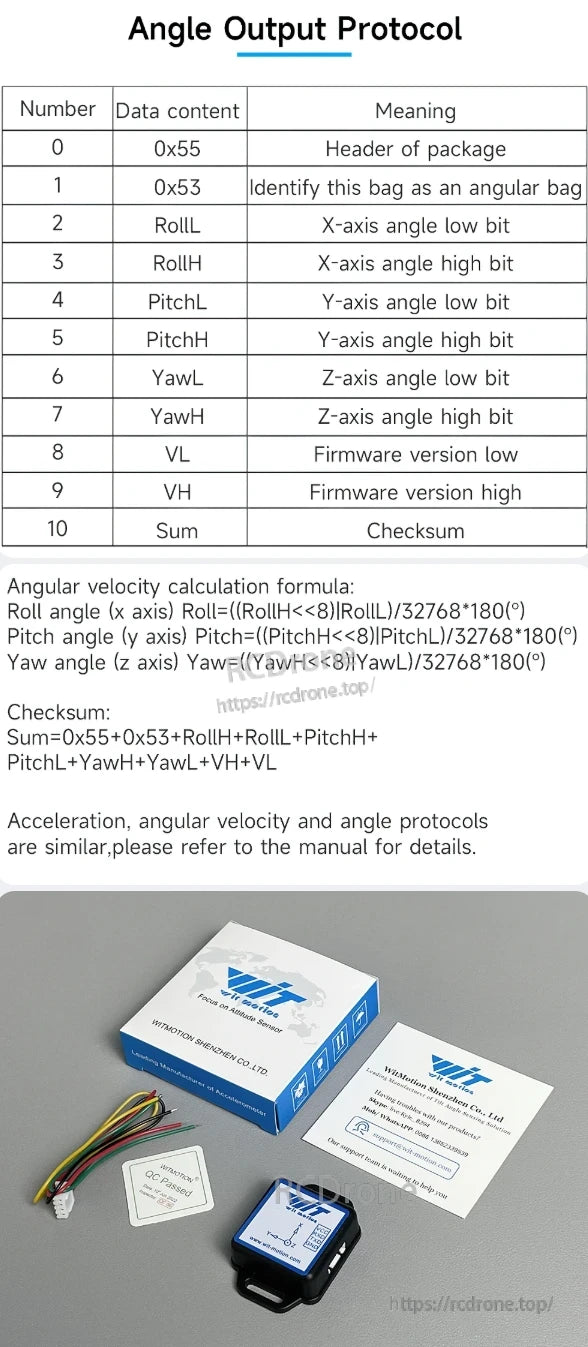
Датчик WitMotion WT61C пропонує протокол виходу кута з даними про крен, тангаж, рульове управління, версію прошивки та контрольну суму. Поставляється з формулами для розрахунків, документацією, кабелями та етикеткою контролю якості.
Related Collections