









WitMotion WT901C 9-осьовий AHRS IMU — акселерометр, гіроскоп, магнітометр з кутом & кватерніон, точність 0,05°, 0,2–200 Гц, TTL/RS232/RS485 Modbus
WitMotion WT901C 9-осьовий AHRS IMU — акселерометр, гіроскоп, магнітометр з кутом & кватерніон, точність 0,05°, 0,2–200 Гц, TTL/RS232/RS485 Modbus
WitMotion
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
WitMotion WT901C - це компактний 9-осевий AHRS IMU, який об'єднує 3-осевий акселерометр, 3-осевий гіроскоп та 3-осевий магнітометр з фільтрацією злиття/Калмана WitMotion для виведення кутів (ролл/тангаж/курс), кутової швидкості, прискорення, магнітного поля та кватерніона. Він забезпечує 0.05° статичну точність XY (0.1° динамічна), підтримує 0.2–200 Гц частоту оновлення та спілкується через TTL, RS232 або RS485 (Modbus)—ідеально підходить для вимірювання нахилу, вібрації та орієнтації в автоматизації, вирівнювальних платформах, VR/AR та промислових випробуваннях.
Ключові особливості
-
Висока точність AHRS: статична XY 0.05°, динамічна 0.1°; осі правої картезіанської системи.
-
Широкий I/O &і напруга: TTL 3.3–5 V, RS232/RS485 5–36 V, швидкість 4 800–230 400 (за замовчуванням 9 600).
-
Конфігурований вихід: 0.2–200 Гц (за замовчуванням 10 Гц); вміст, що вибирається користувачем.
-
Повні дані 9-осей: Прискорення, кутова швидкість, магнітне поле, кут &і кватерніон.
-
Інструменти візуалізації: Програмне забезпечення Windows MiniIMU з графіками в реальному часі, ведення/експорт сирих даних (TXT), демонстрація 3D-руху, та візуальна магнітна калібровка.
-
Ресурси для розробників: Драйвери (CH340/CP2102), посібники/технічні характеристики, зразковий код для 51/C++/STM32/Arduino/Matlab, та додаток для Android.
-
Гнучка установка: Вертикальне або горизонтальне кріплення; компактний 51 × 36 × 15 мм, ~20 г.
html
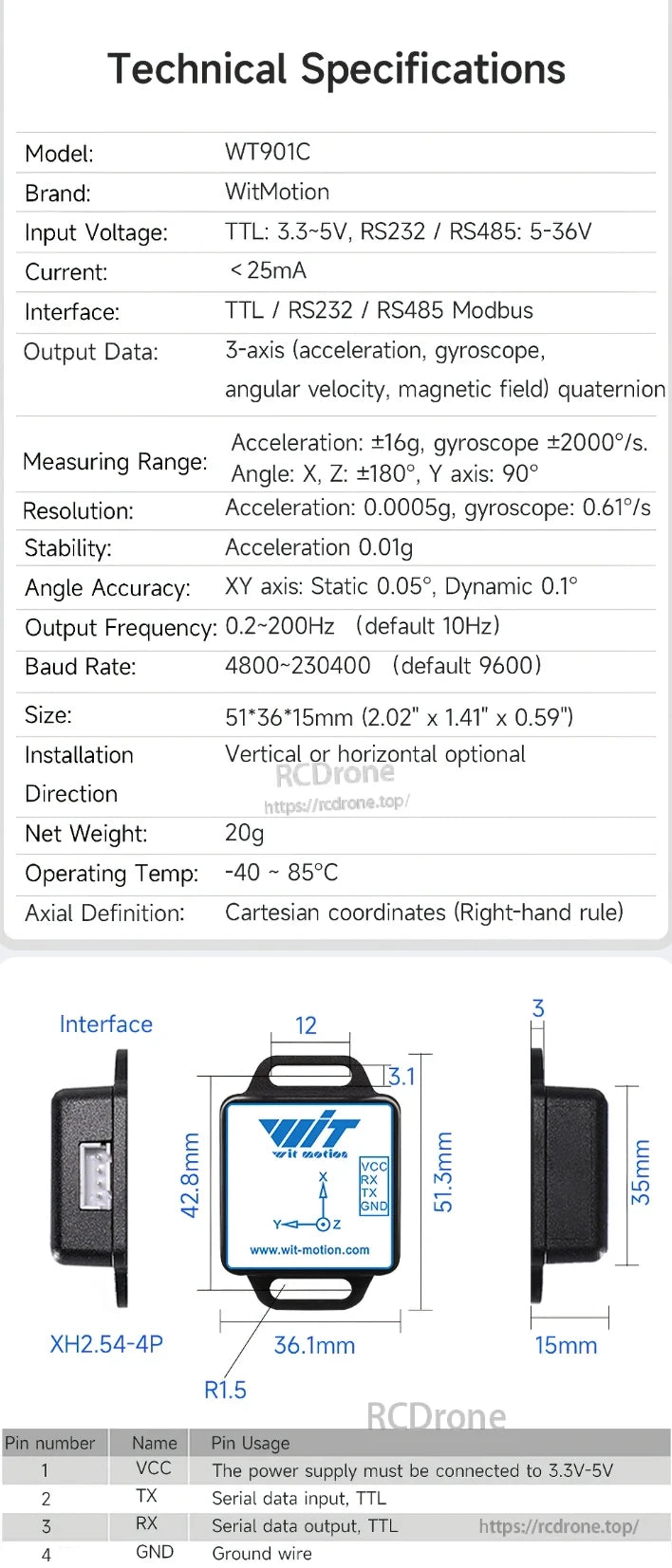
Технічні характеристики
-
Модель/Бренд: WT901C / WitMotion
-
Інтерфейси: TTL / RS232 / RS485 (Modbus)
-
Вхідна напруга: TTL: 3.3–5 V; RS232/RS485: 5–36 V
-
Струм: < 25 mA
-
Вихідні дані: 3-осеве прискорення, гіроскоп (кутова швидкість), магнітне поле, кут, кватерніон
-
Діапазон вимірювання: Acc ±16 g; Гіроскоп ±2000 °/с; Кут X,Z ±180°, Y 90°
-
Роздільна здатність: Acc 0.0005 g; Гіроскоп 0.61 °/с
-
Стабільність: Acc 0. 01 g
-
Точність кута: XY статична 0.05°, динамічна 0.1°
-
Частота виходу: 0.2–200 Гц (за замовчуванням 10 Гц)
-
Швидкість передачі: 4 800–230 400 (за замовчуванням 9 600)
-
Розмір / Вага: 51 × 36 × 15 мм / ≈ 20 г
-
Температура експлуатації: −40 ~ 85 °C
-
Визначення осі: Декартові координати, правило правої руки
Розміри &та з'єднувач (версія TTL)
-
Корпус: 51.3 мм (В) × 36.1 мм (Ш) × 15 мм (Г); радіус монтажних вух R1.5
-
З'єднувач: XH2.54-4P
-
Вивід (зліва→право на етикетці VCC/RX/TX/GND):
-
VCC — живлення 3.3–5 V
-
TX — Вхід серійних даних, TTL
-
RX — Вихід серійних даних, TTL
-
GND — земля
-
Примітка: Графік осей надрукований на корпусі (X↑, Y→, Z•), що допомагає в вирівнюванні.
Протокол виходу кута (кадр 0x55 0x53)
| Байт | Зміст | Значення |
|---|---|---|
| 0 | 0x55 | Заголовок |
| 1 | 0x53 | ID кадру кута |
| 2–3 | RollL/RollH | Кут по осі X |
| 4–5 | PitchL/PitchH | Кут по осі Y |
| 6–7 | YawL/YawH | Кут по осі Z |
| 8–9 | VL/VH | Версія прошивки (низька/висока) |
| 10 | Сума | Контрольна сума |
Перетворення кута:Рол = ((RollH<<8)|RollL)/32768*180°Кут нахилу = ((PitchH<<8)|PitchL)/32768*180°Кут повороту = ((YawH<<8)|YawL)/32768*180°
(Системи прискорення та кутової швидкості подібні; див. посібник.)
Програмне забезпечення &та інструменти
-
Windows (MiniIMU.exe): конфігурація пристрою (діапазони, пропускна здатність, швидкість виводу), графіки в реальному часі, перегляд сирих даних, 3D поза візуалізація, експорт у TXT.
-
Калібрування магнітного поля: візуальний процес підгонки еліпса для зменшення похибки (обертання навколо X/Y/Z).
-
Інтеграція MCU: пряме послідовне з'єднання; TTL рекомендовано для простого підключення MCU (Arduino/STM32 тощо).
-
Включені ресурси: Datasheet.pdf, Manual.pdf, драйвери CH340 &та CP2102, приклад коду, Android App, демонстраційні відео.
Типові застосування
Автоматизація | Моніторинг нахилу/рівня | Моніторинг вібрацій | Вирівнювання платформ | Інтеграція IoT систем | Промислове тестування | VR/AR гарнітури | Споживча електроніка.
Деталі

Економічний AHRS IMU з точністю 0.05° по осях X та Y. Має функції нахилу, вібрації та визначення положення за допомогою алгоритму злиття WitMotion. Включає прискорення, гіроскоп, кути, магнітні дані, Калманівське фільтрування та функції кватерніонів.
WitMotion WT901C IMU пропонує 3-осеве визначення з прискоренням, гіроскопом та магнітометром. Забезпечує вихід кватерніонів. Підтримує TTL, RS232, RS485. Вимірює ±16g, ±2000°/с, кути ±180°. Компактний розмір 51×36×15мм. Працює в діапазоні від -40 до 85°C.

WitMotion WT901C IMU підтримує автоматизацію, VR-гарнітури, вирівнювання та моніторинг вібрації. Він підходить для споживчої електроніки, IoT, промислових випробувань та AR/VR. Поставляється з безкоштовним програмним забезпеченням для відображення даних кута в реальному часі.

Меню налаштувань WitMotion WT901C IMU дозволяє калібрування сенсора, налаштування виходу даних та візуалізацію руху в реальному часі. Підтримує 9-осевий алгоритм, регульовану прискореність, гіроскоп, смугу пропускання, часовий пояс GPS. Графіки в реальному часі показують прискорення та кутову швидкість для точного вимірювання.
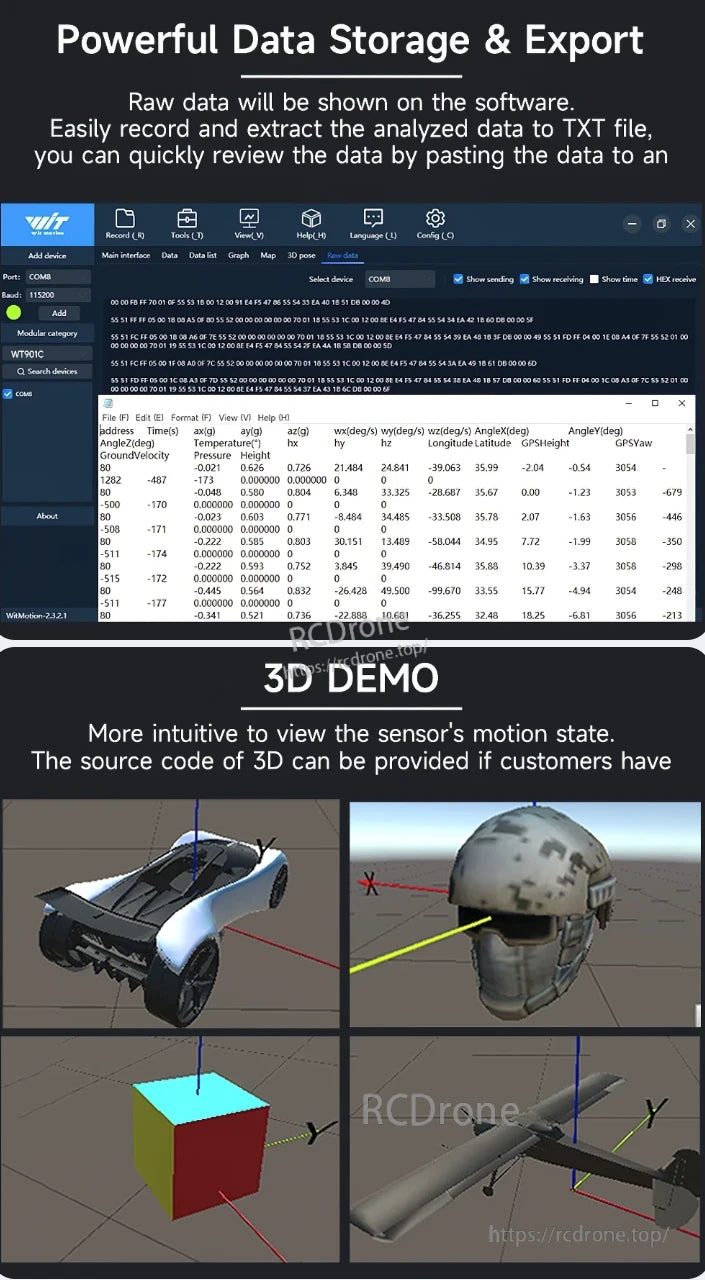
WitMotion WT901C IMU пропонує потужне зберігання даних, легкий експорт TXT та 3D візуалізацію руху з доступним вихідним кодом.
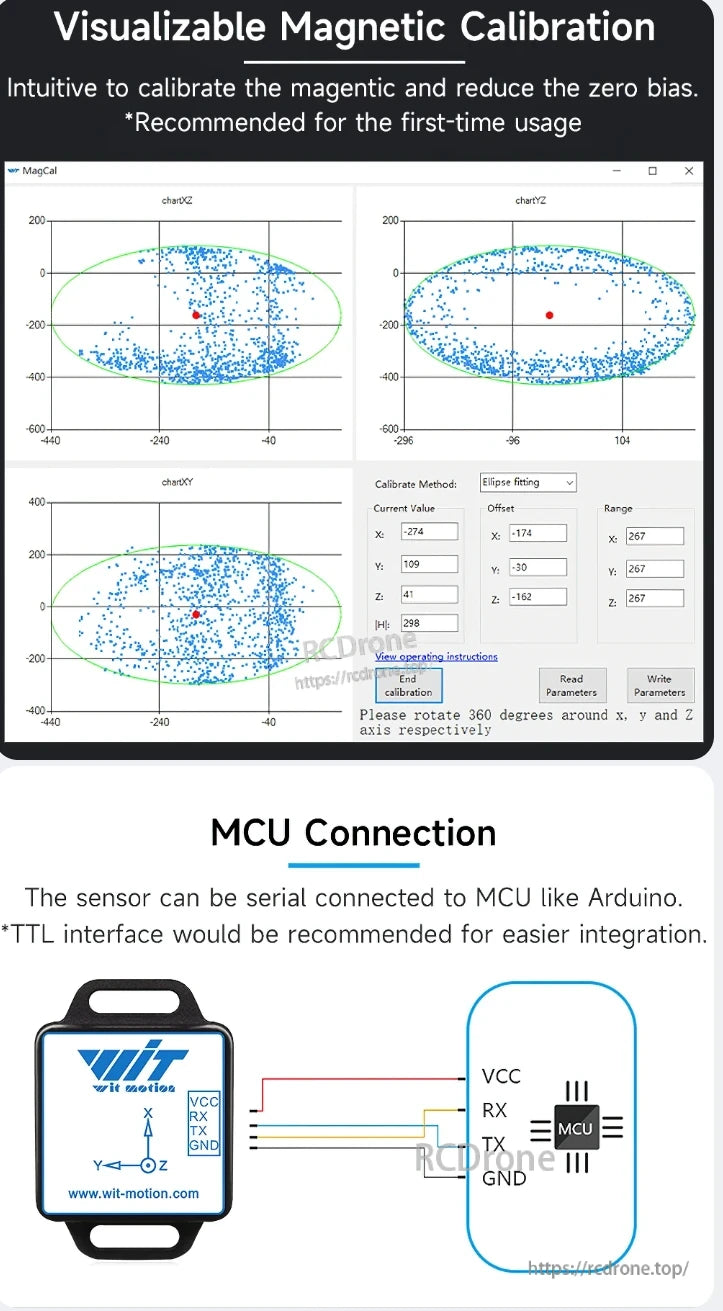
Візуалізована магнітна калібрування для WT901C IMU з методом підгонки еліпса. Рекомендується підключення MCU через TTL інтерфейс. Сенсор підключається до MCU, подібних до Arduino, використовуючи пін VCC, RX, TX, GND.
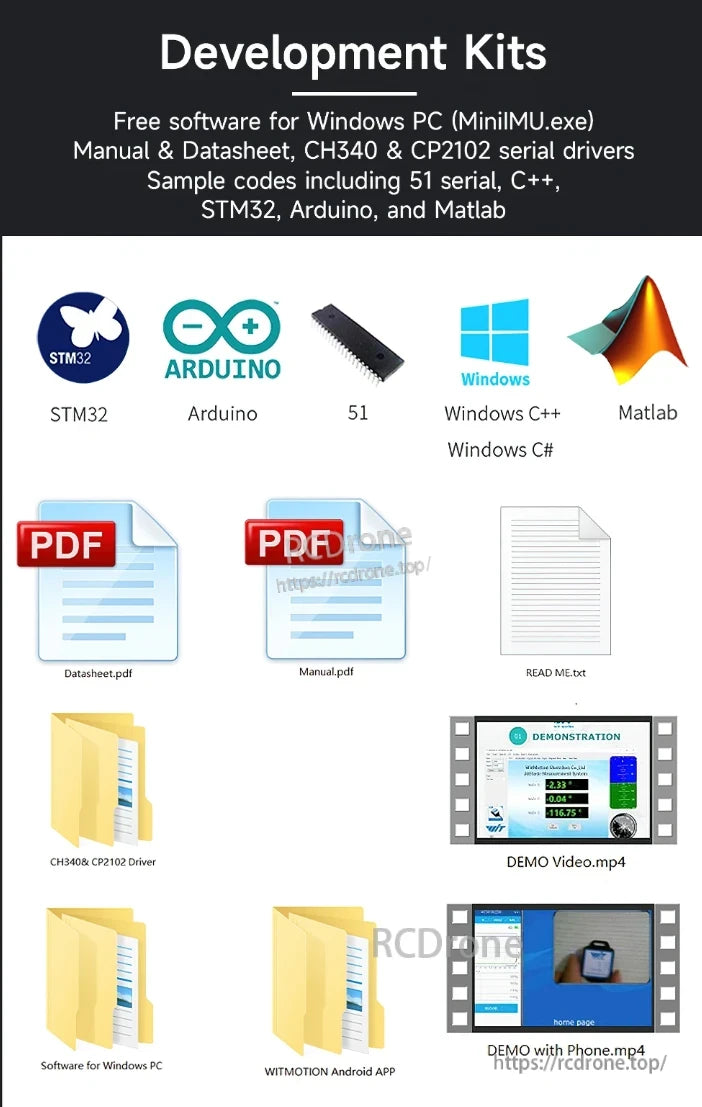
Розробницькі набори включають безкоштовне програмне забезпечення для Windows, посібник, технічний опис, драйвери CH340 & CP2102, зразки коду для 51, C++, STM32, Arduino та Matlab, а також демонстраційні відео та додаток для Android.
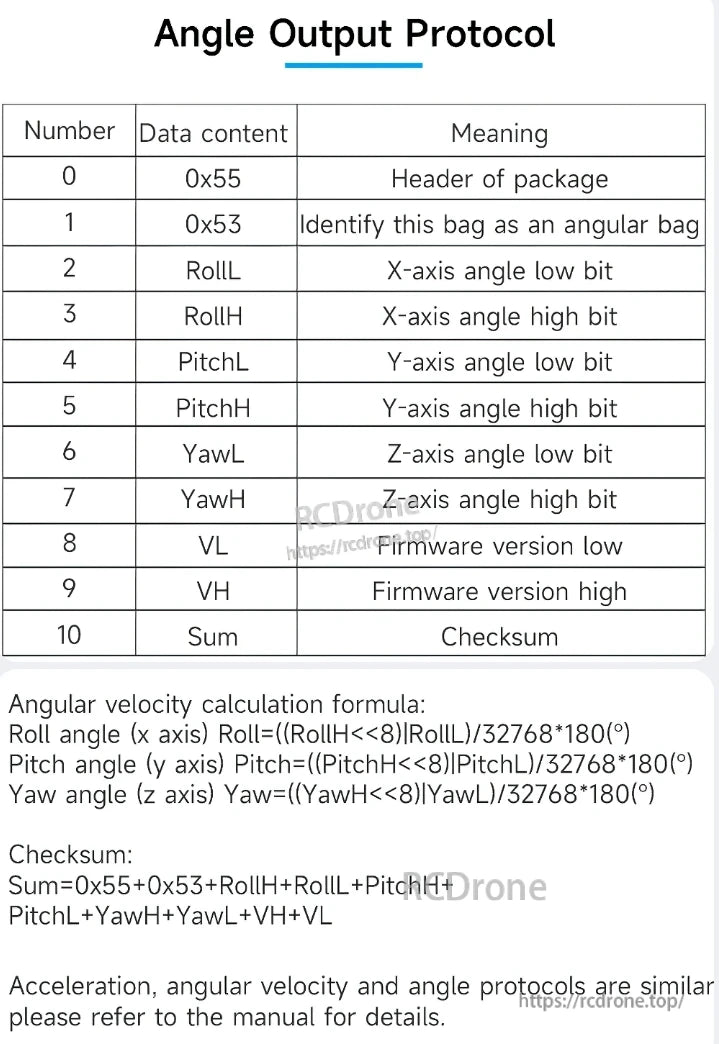
Структура даних для виходу кута IMU WT901C включає заголовок, кут нахилу, кут тангажу, кут крену, версію прошивки та контрольну суму. Формули для розрахунків та перевірки надані. Подібні структури існують для прискорення та кутової швидкості.
Related Collections









