











Yahboom ROSMASTER X3 PLUS ROS Робот з колесами Mecanum & 6-осьовий маніпулятор для Jetson Nano 4GB/Orin SUPER/RPi 5
Yahboom ROSMASTER X3 PLUS ROS Робот з колесами Mecanum & 6-осьовий маніпулятор для Jetson Nano 4GB/Orin SUPER/RPi 5
Yahboom
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
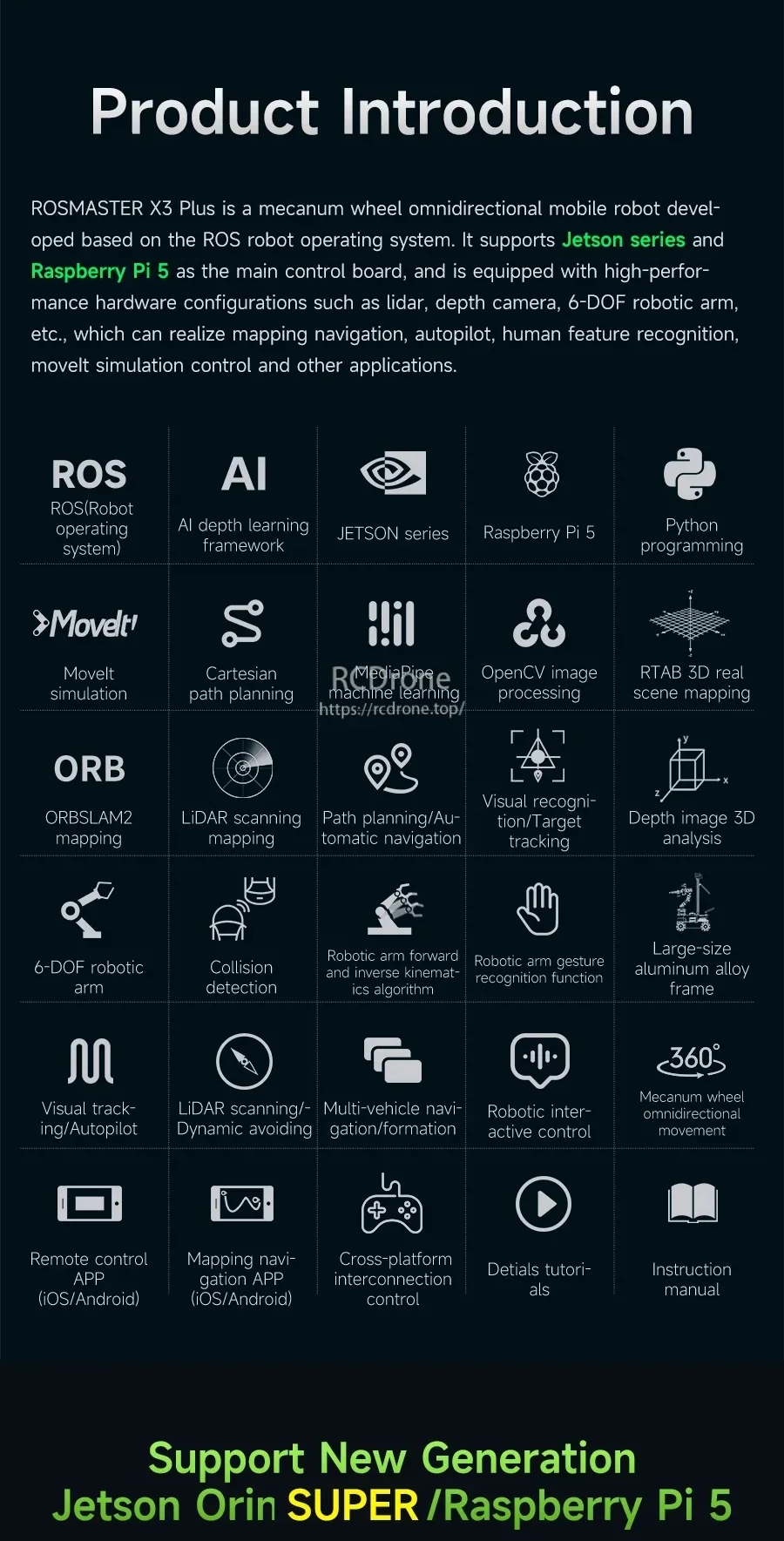
Yahboom ROSMASTER X3 PLUS — це ROS робот (освітній робот ROS) з омнінаправленим рухом на колесах Mecanum, розроблений на операційній системі робота ROS. Він підтримує чотири контролери: Jetson NANO 4GB, Jetson Orin NX SUPER, Jetson Orin NANO SUPER та Raspberry Pi 5. Платформа інтегрує LiDAR, камеру глибини, 6DOF роботизовану руку, модуль взаємодії з розпізнаванням голосу, 520 моторів з редуктором та HD 7-дюймовий сенсорний екран для розробки ROS та робочих процесів навчання AI/зору, таких як картографування та навігація, розпізнавання людських особливостей та симуляція/управління MoveIt.
Ключові особливості
- Мобільна база з омнінаправленими колесами-меканумами з підвіскою на маятниковому шасі
- 6-DOF AI візійний роботизований маніпулятор з підтримкою симуляції/управління MoveIt
- LiDAR SLAM, планування маршруту та навігаційні робочі процеси (включаючи підтримку gmapping/hector/karto/cartographer, як зазначено)
- Функції камери глибини, включаючи хмару точок, ORB-SLAM2 + Octomap картографування та RTAB-Map 3D візуальне картографування/навігацію
- Модуль голосової взаємодії робота для голосового управління рухом та навігацією (як зазначено)
- Підтримуються кілька методів управління: мобільний телефон, ручка та клавіатура комп'ютера; також перераховані варіанти віддаленого управління VNC/Jupyter/SSH
- Більшість структурних частин попередньо зібрані; після отримання потрібно лише встановити/підключити основну плату управління для використання
Технічні характеристики
Платформа робота
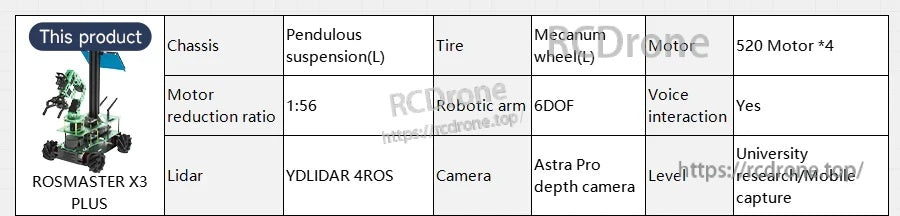
| Модель робота | ROSMASTER X3 PLUS |
| Рух | Рух на колесах Mecanum у всіх напрямках (360 градусів) |
| Шасі | Шасі з алюмінієвого сплаву; велика рама з алюмінієвого сплаву |
| Підвіска | Маятникова підвіска (L) |
| Шини / колеса | Колеса Mecanum (L) |
| Привідні мотори | Мотор 520 x4 (мотор з редуктором 520 з енкодером позначений) |
| Передаточне число мотору | 1:56 |
| Роботизована рука | 6DOF |
| Голосова взаємодія | Так |
| LiDAR | YDLIDAR 4ROS |
| Камера глибини | Камера глибини Astra Pro (також позначена камера глибини Astra Pro Plus) |
| Дисплей | 7-дюймовий HD сенсорний екран |
| Рівень (як позначено) | Університетські дослідження / Мобільна зйомка |
Опції головної плати управління (як зазначено)
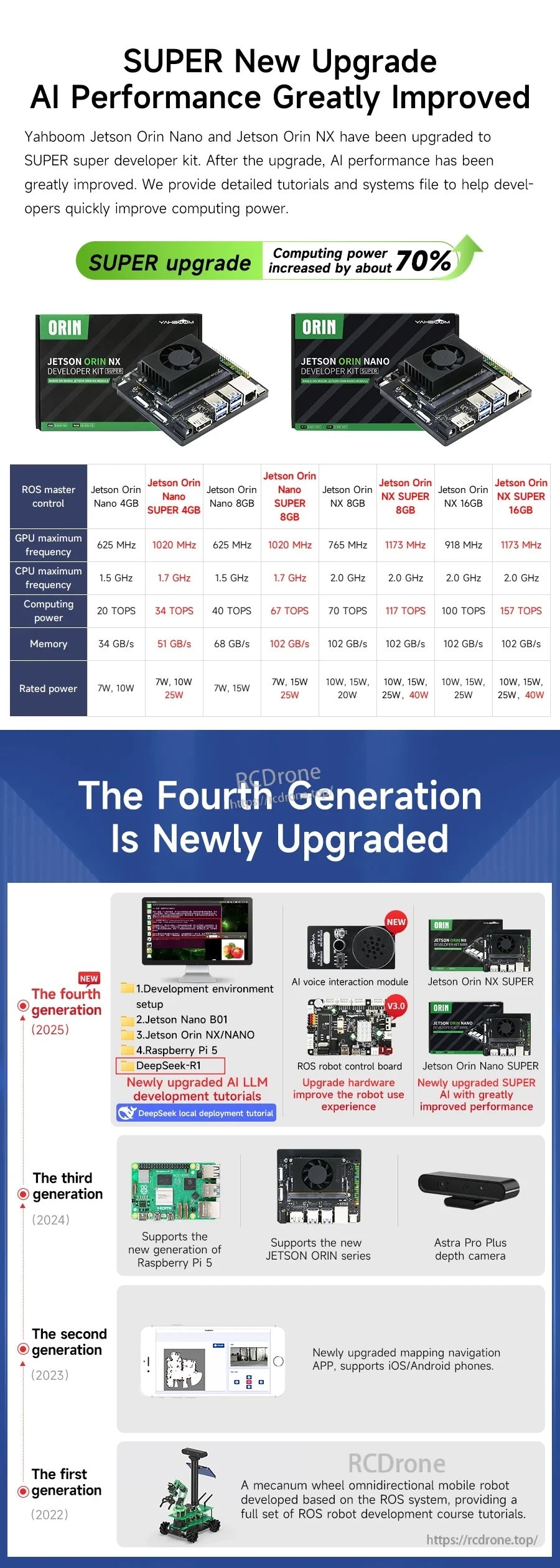
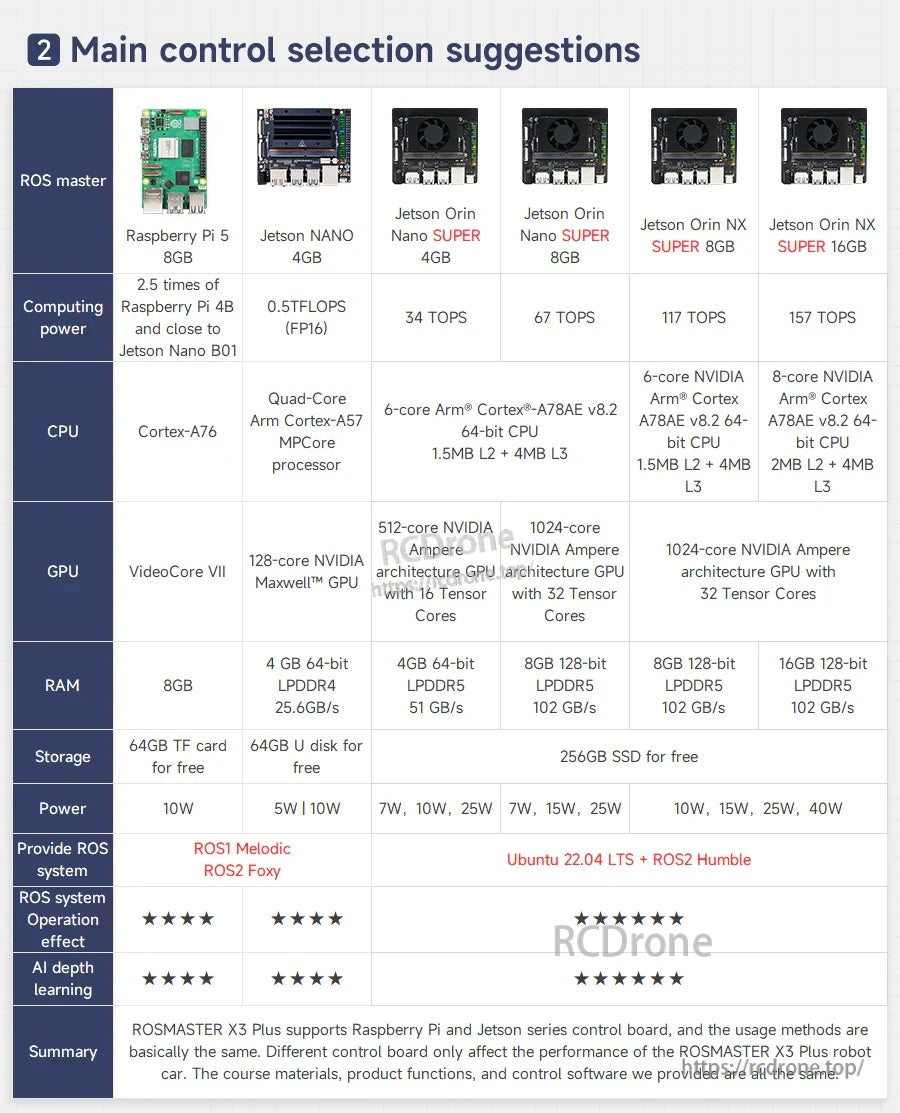
| Головний контроль ROS | Raspberry Pi 5 8GB | Jetson NANO 4GB | Jetson Orin Nano SUPER 4GB | Jetson Orin Nano SUPER 8GB | Jetson Orin NX SUPER 8GB | Jetson Orin NX SUPER 16GB |
|---|---|---|---|---|---|---|
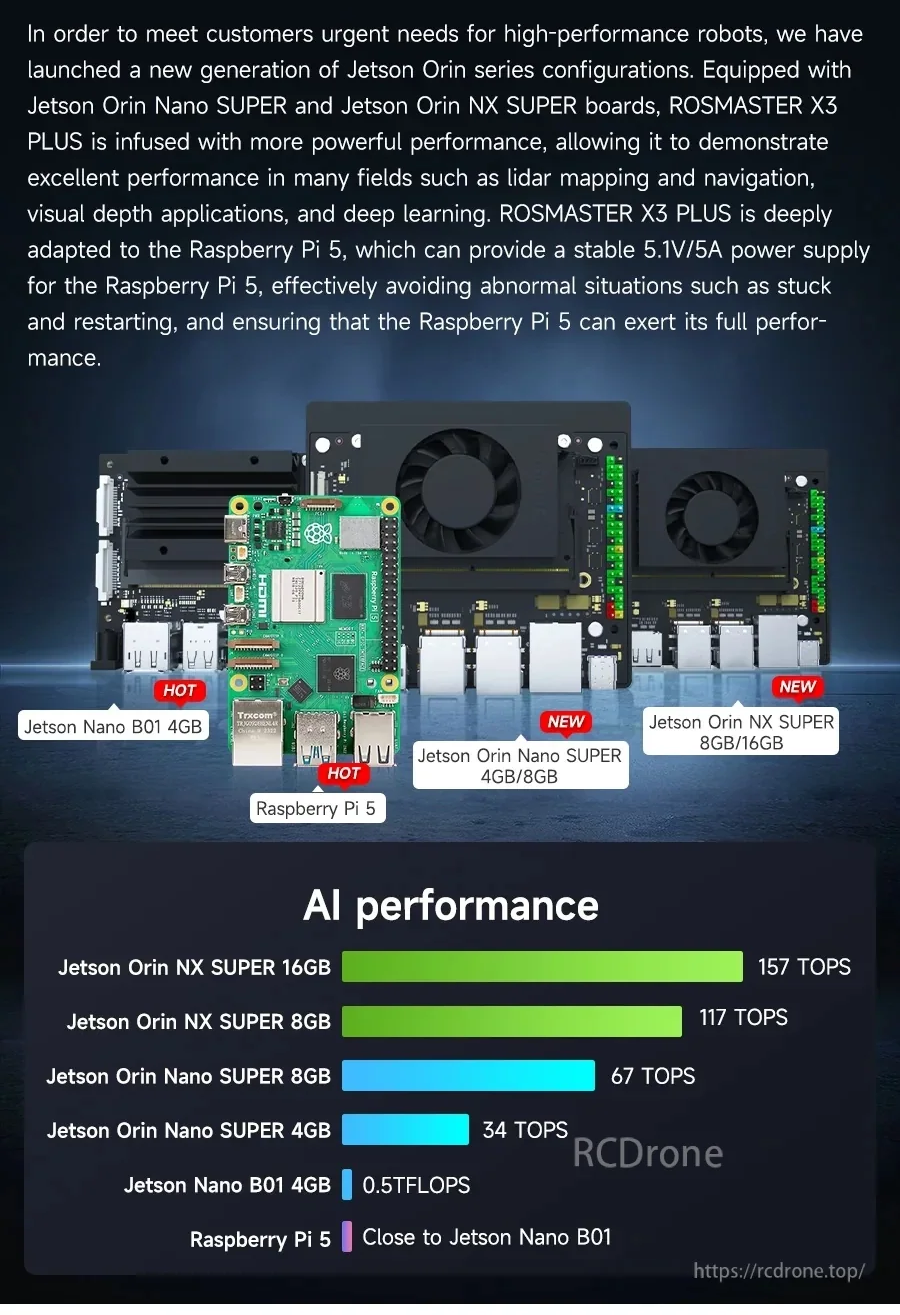
| Обчислювальна потужність | 2.5 разів Raspberry Pi 4B і близько до Jetson Nano B01 | 0.5 TFLOPS (FP16) | 34 TOPS | 67 TOPS | 117 TOPS | 157 TOPS |
| ЦП | Cortex-A76 | Чотириядерний процесор Arm Cortex-A57 MPCore | 6-ядерний Arm Cortex-A78AE v8.2 64-бітний ЦП; 1.5MB L2 + 4MB L3 | 6-ядерний Arm Cortex-A78AE v8.2 64-бітний ЦП; 1.5MB L2 + 4MB L3 | 6-ядерний NVIDIA Arm Cortex-A78AE v8.2 64-бітний ЦП; 1.5MB L2 + 4MB L3 | 8-ядерний NVIDIA Arm Cortex-A78AE v8.2 64-бітний CPU; 2MB L2 + 4MB L3 |
| GPU | VideoCore VII | 128-ядерний NVIDIA Maxwell GPU | 512-ядерний NVIDIA Ampere архітектура GPU з 16 Tensor Cores | 1024-ядерний NVIDIA Ampere архітектура GPU з 32 Tensor Cores | 1024-ядерний NVIDIA Ampere архітектура GPU з 32 Tensor Cores | 1024-ядерний NVIDIA Ampere архітектура GPU з 32 Tensor Cores |
| RAM | 8GB | 4 GB 64-бітний LPDDR4 25.6GB/s | 4GB 64-біт LPDDR5 51 GB/s | 8GB 128-біт LPDDR5 102 GB/s | 8GB 128-біт LPDDR5 102 GB/s | 16GB 128-біт LPDDR5 102 GB/s |
| Зберігання (як зазначено) | 64GB TF карта безкоштовно | 64GB U диск безкоштовно | 256GB SSD безкоштовно | |||
| Живлення | 10W | 5W | 10W | 7W, 10W, 25W | 7W, 15W, 25W | 10W, 15W, 25W, 40W | 10W, 15W, 25W, 40W |
| Надана система ROS (як зазначено) | ROS1 Melodic; ROS2 Foxy | ROS1 Melodic; ROS2 Foxy | Ubuntu 22.04 LTS + ROS2 Humble | |||
ROSMASTER X3 PLUS глибоко адаптований до Raspberry Pi 5 і може забезпечити стабільне живлення 5.1V/5A для Raspberry Pi 5 (як описано).
Список функцій
Камера глибини
- Моніторинг в реальному часі через веб
- Оцінка позиції ArTag
- AR спецефекти
- Створення QR-коду
- Розпізнавання QR-коду
- Виявлення скелета
- Слідування за пальцем
- Калібрування камери
- Розробка MediaPipe
- Відстеження кольору
- KCF відстеження об'єктів
- Візуальне відстеження
- ORBSLAM2 картографування
- ORBSLAM2 + Octomap
- Rtabmap 3D картографування
- Rtabmap 3D навігація
- yolov4-tiny розпізнавання об'єктів
- yolov5 + TensorRT розпізнавання об'єктів
- yolov11 + TensorRT розпізнавання об'єктів
- yolov5 для навчання дорожніх знаків
- TensorRT для прискорення розпізнавання знаків
YDLIDAR 4ROS LiDAR
- Алгоритм картографування Mapping
- Алгоритм картографування Hector
- Алгоритм картографування Karto
- Алгоритм картографування Cartographer
- Картографування дослідження RRT
- Фіксована точка навігації LiDAR
- Багатоточкова навігація LiDAR
- Планування шляху TEB і DWA
- Уникнення перешкод LiDAR
- Відстеження LiDAR
- Охорона LiDAR
- Патрулювання LiDAR
- Картографування ROS APP
- Навігація ROS APP
- Навігація для кількох транспортних засобів
- Формування для кількох транспортних засобів
- Оточення для кількох транспортних засобів
6DOF Роботизована рука
- Конфігурація MoveIt
- MoveIt керує реальною машиною
- MoveIt рухається випадково
- Кінематичний дизайн MoveIt
- Картезіанський шлях MoveIt
- Уникнення MoveIt
- Відчуття MoveIt
- Планування траєкторії MoveIt
- Керування автомобілем за допомогою долоні MediaPipe
- Керування роботизованою рукою за допомогою жестів MediaPipe
- MediaPipe керування жестами автомобілем
- MediaPipe керування положенням руки роботизованою рукою
- MediaPipe розпізнає та відстежує керування долонею роботизованою рукою
- Розпізнає кольоровий блок та обробку
- Автопілот для очищення перешкод
Модуль AI голосової взаємодії
- Введення голосового модуля та прив'язка порту
- Команда пробудження
- Голосове керування рухом автомобіля
- Голосове керування автопілотом
- Голосове керування розпізнаванням кольору
- Голосове керування відстеженням кольору
- Голосове керування багатоточковою навігацією
- Голосові функції роботизованої руки
Плата розширення робота ROS
- Серійний зв'язок
- Керування сервоприводом
- 9-осьовий датчик положення
- Виявлення напруги батареї
- CAN-шина зв'язку
- Дистанційне керування моделлю літака SBUS
- Керування дзвінком
- Керування RGB світловою панеллю
ROS Master Control (як зазначено)
- VNC дистанційне керування
- Jupyter lab дистанційне керування
- SSH дистанційне керування
- Керування клавіатурою
- Керування ручкою
- Керування за допомогою датчика гравітації в додатку
- Передача зображень та програмне керування в додатку
- Конфігурація багатомашинного зв'язку
- Прискорення GPU*
- Прискорення TensorRT*
- Серіальний порт зв'язку робота
- Випуск даних IMU та одометра
- Встановлення статичної IP або режиму точки доступу
- qr реальний час PID керування
- Лінійна швидкість та кутова швидкість є більш точними
- Дисплей OLED екрану
Примітка: Пункти, позначені *, вказують на те, що доступні лише контрольні плати серії Jetson.
Застосування
- Картографування та навігація через додаток (iOS/Android вказані)
- Картографування за допомогою LiDAR та автономна навігація (вказані одноточкова та багатоточкова навігація)
- RTAB-Map 3D візуальне картографування, навігація та глобальна релокалізація (як описано)
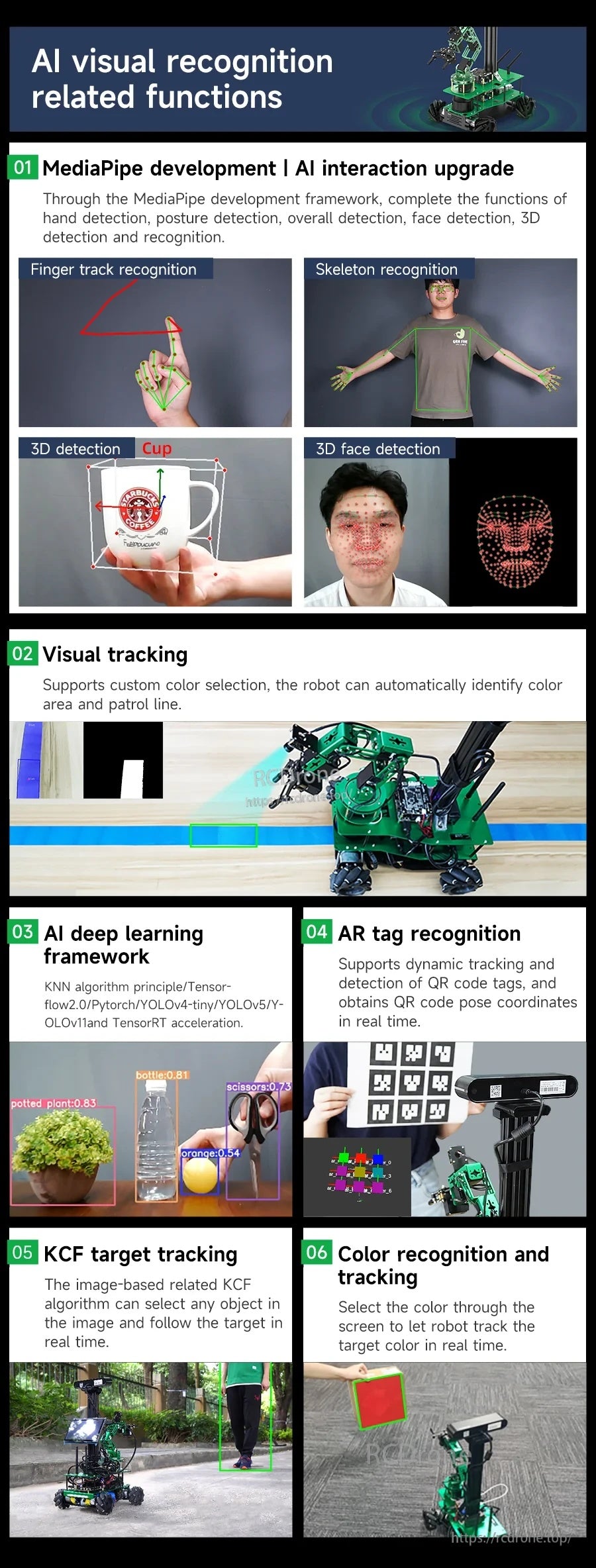
- Розпізнавання людських особливостей та візуальне відстеження (як описано/вказано)
- Симуляційне управління роботизованою рукою MoveIt та навчання кінематиці/плануванню траєкторії
- Синхронне управління кількома машинами та навігація/формування кількох транспортних засобів (як вказано)
Навчальні матеріали & Відео
Посилання на навчальний матеріал (офіційне): http://www.yahboom.net/study/ROSMASTER-X3-PLUS
Для вибору конфігурації або технічної підтримки перед покупкою, звертайтеся https://rcdrone.top/ або надішліть електронний лист [email protected].
Деталі

ROSMASTER X3 PLUS поєднує всеспрямовану базу з колесами механум, LiDAR, камеру глибини та 6-DOF маніпулятор для навчання ROS.
Виберіть основний контролер — Raspberry Pi 5 або NVIDIA Jetson, щоб відповідати вашим потребам у продуктивності ROS та навантаженні AI.
Основні апаратні особливості включають колеса механум з підвіскою маятника, 6-DOF маніпулятор та підтримку SLAM на базі YDLIDAR.
Деталі вибору контролера допомагають планувати обчислення, пам'ять та енергію для завдань, таких як картографування, навігація та візуальні конвеєри.

Огляд аксесуарів охоплює включене обладнання для сенсорики та взаємодії, яке використовується в навчальних посібниках та демонстраціях ROS.

Велике шасі з алюмінієвого сплаву та підвіска маятника покращують контакт коліс на нерівних поверхнях для плавнішого контролю руху.
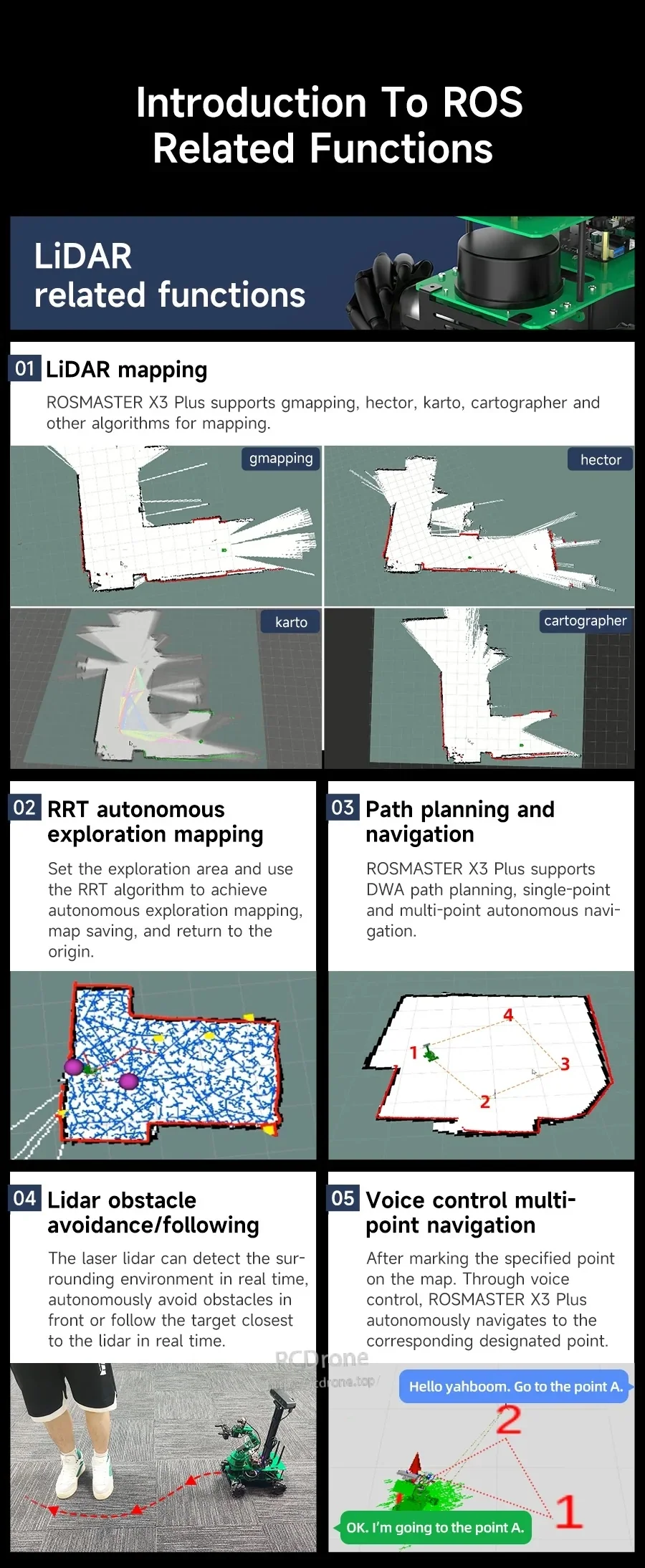
LiDAR робочі процеси підтримують картографування та навігацію, включаючи загальні SLAM стеки та планування маршруту для автономного водіння.
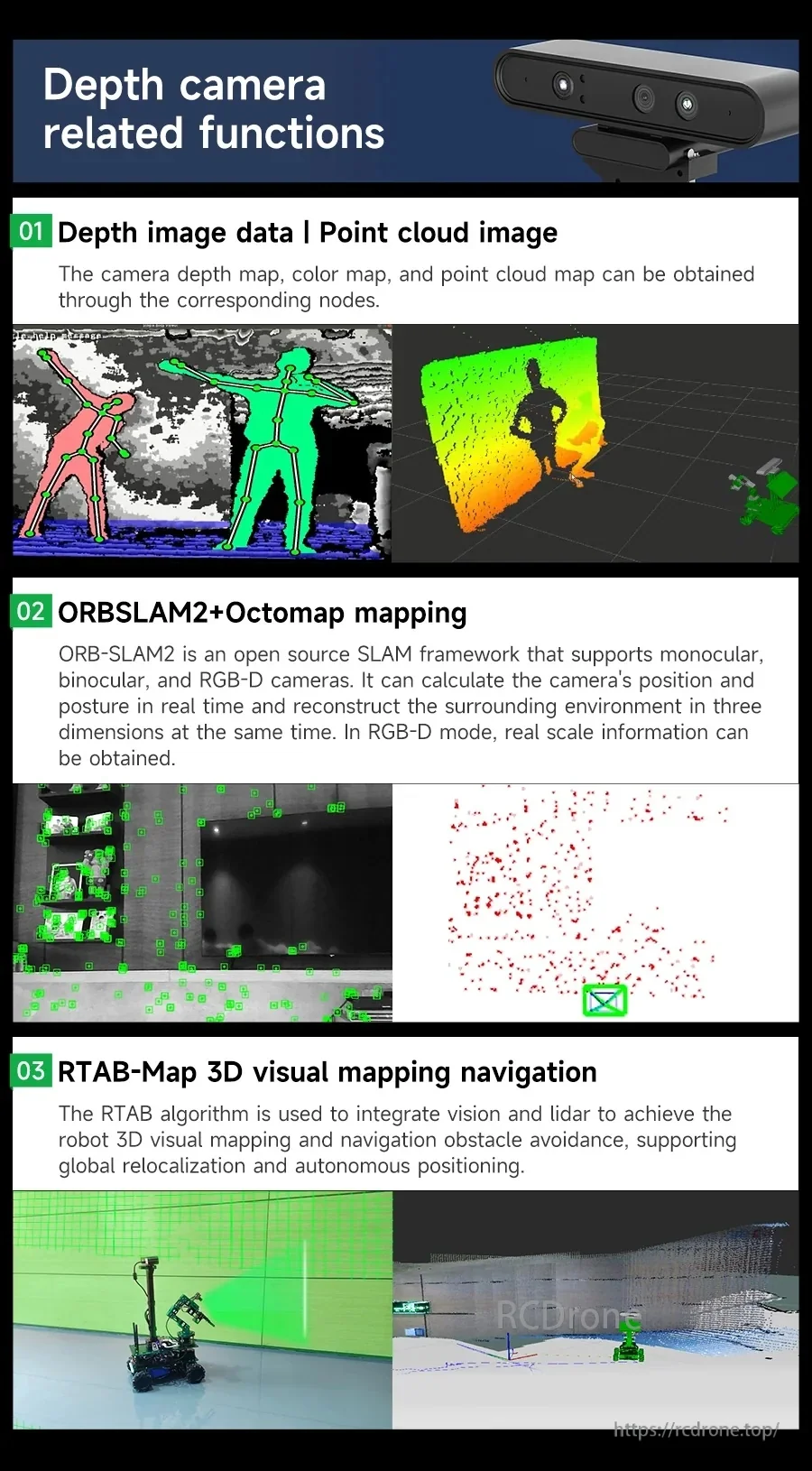
Конвеєри камер глибини дозволяють створювати хмари точок та 3D-картографування, такі як ORB‑SLAM2 + Octomap та RTAB‑Map.
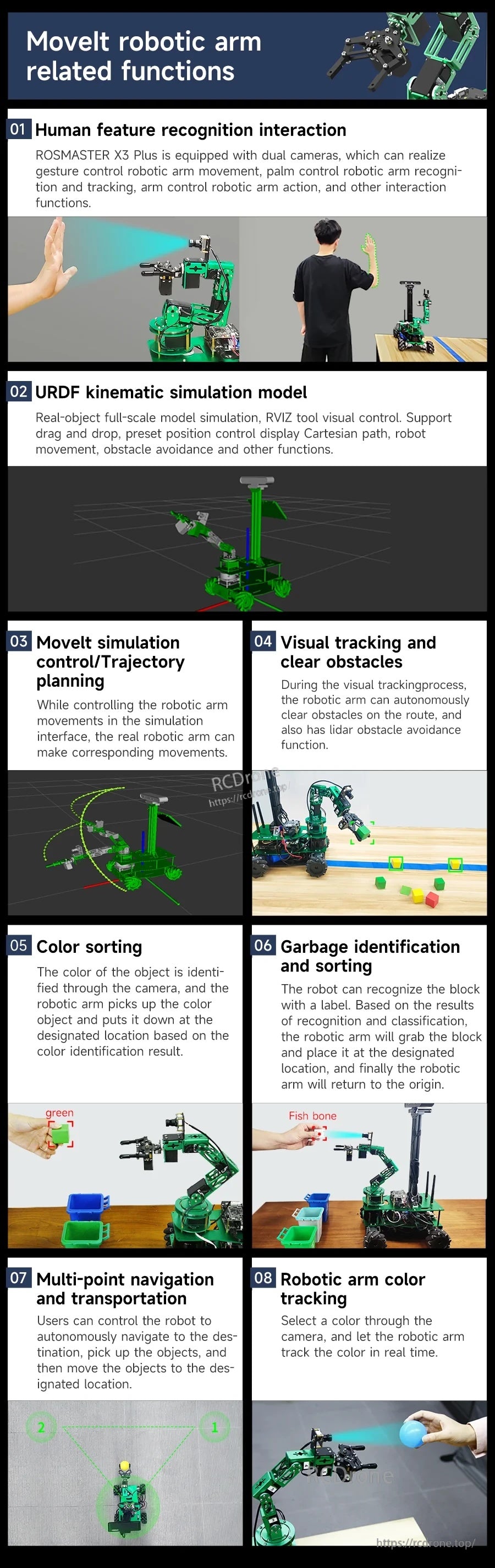
Приклади, зосереджені на MoveIt, охоплюють кінематику (URDF), завдання захоплення, відстеження та практичні вправи з підбору та розміщення.

Доступні кілька варіантів управління, включаючи методи віддаленого доступу, демонстрації формування/координації та голосову взаємодію.
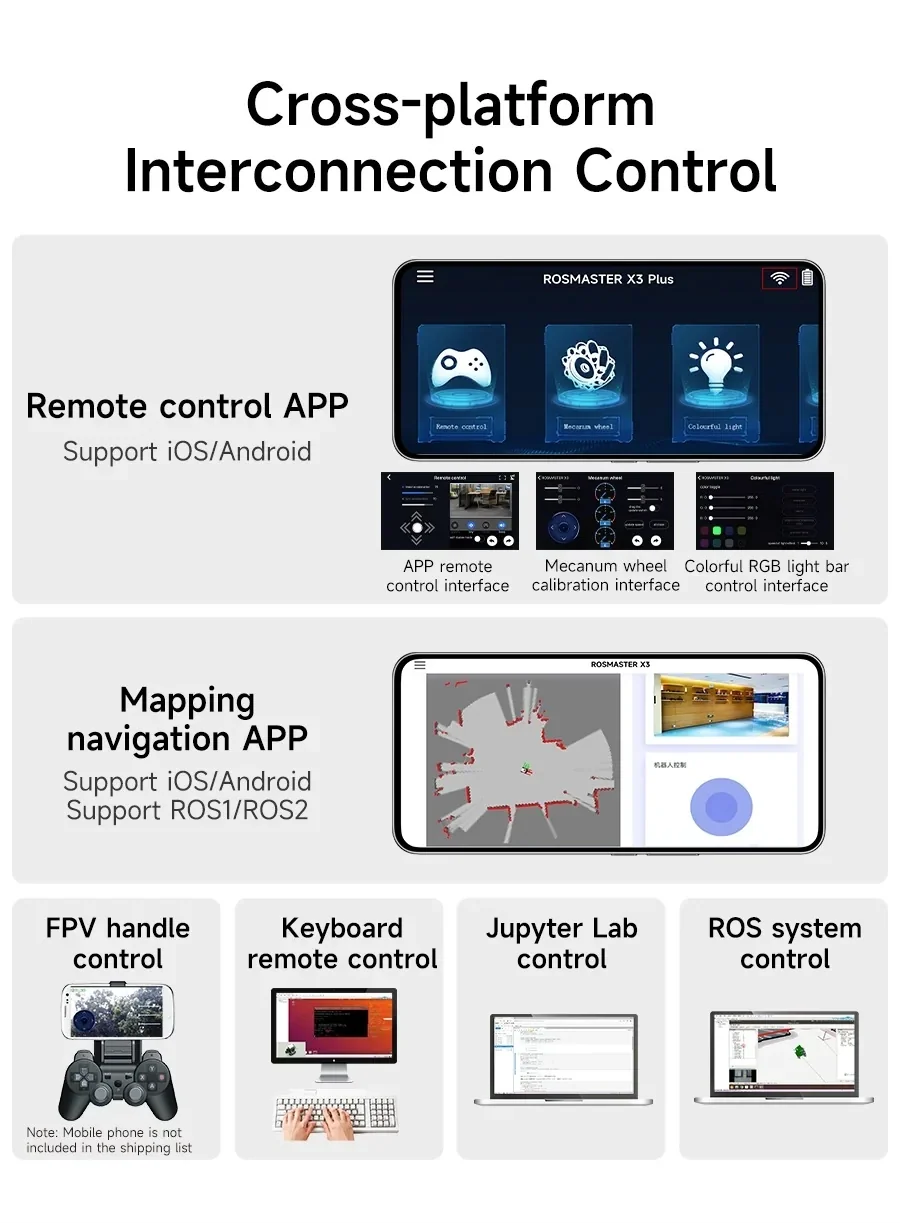
ROSMASTER X3 Plus підтримує крос-платформенне управління через iOS/Android віддалені та картографічні додатки, а також інтерфейси клавіатури, Jupyter Lab та системи ROS.
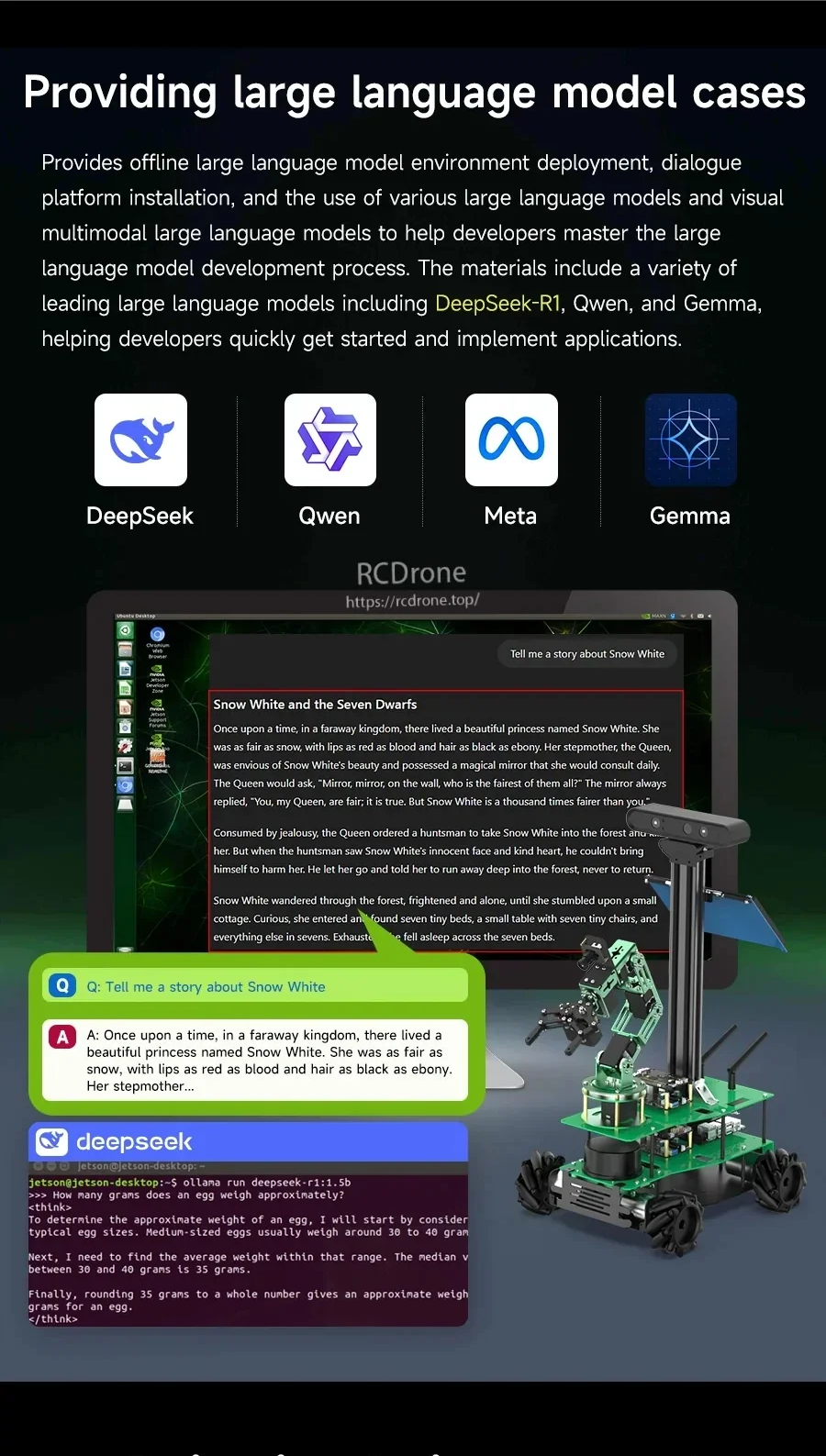
Набір роботів ROS включає демонстраційні випадки великих мовних моделей, щоб допомогти розробникам почати роботу з платформами, такими як DeepSeek, Qwen, Meta та Gemma.
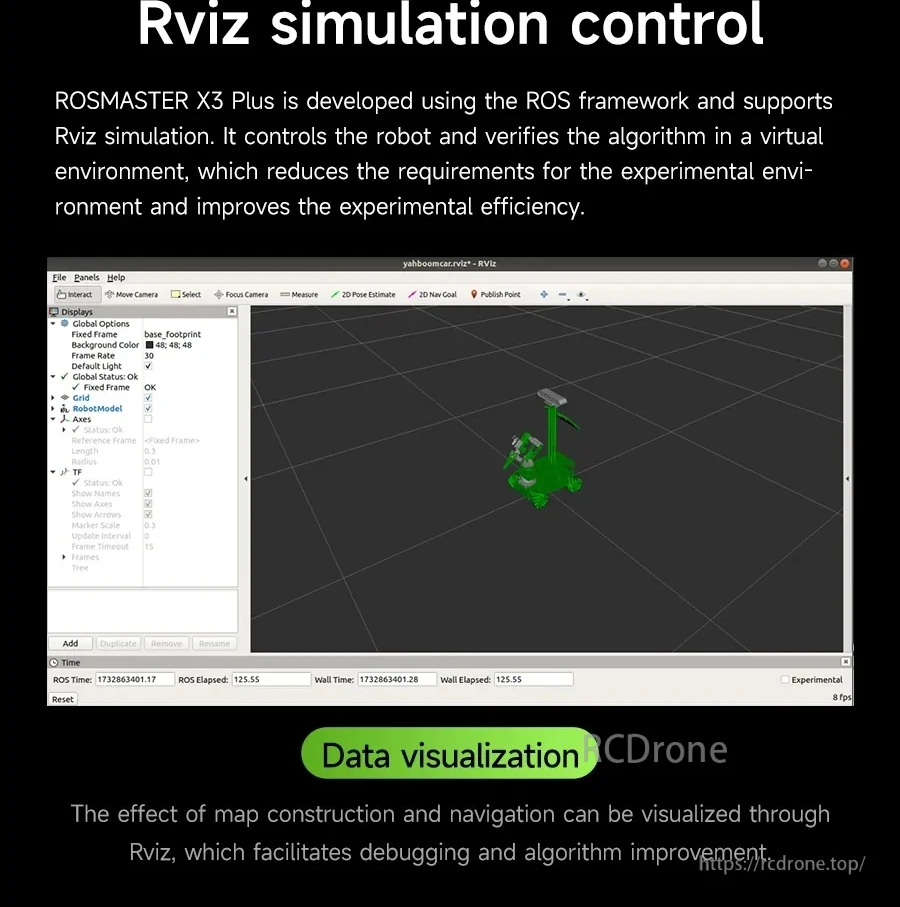
ROSMASTER X3 Plus підтримує симуляційне управління RViz та візуалізацію даних для допомоги у тестуванні та налагодженні алгоритмів.
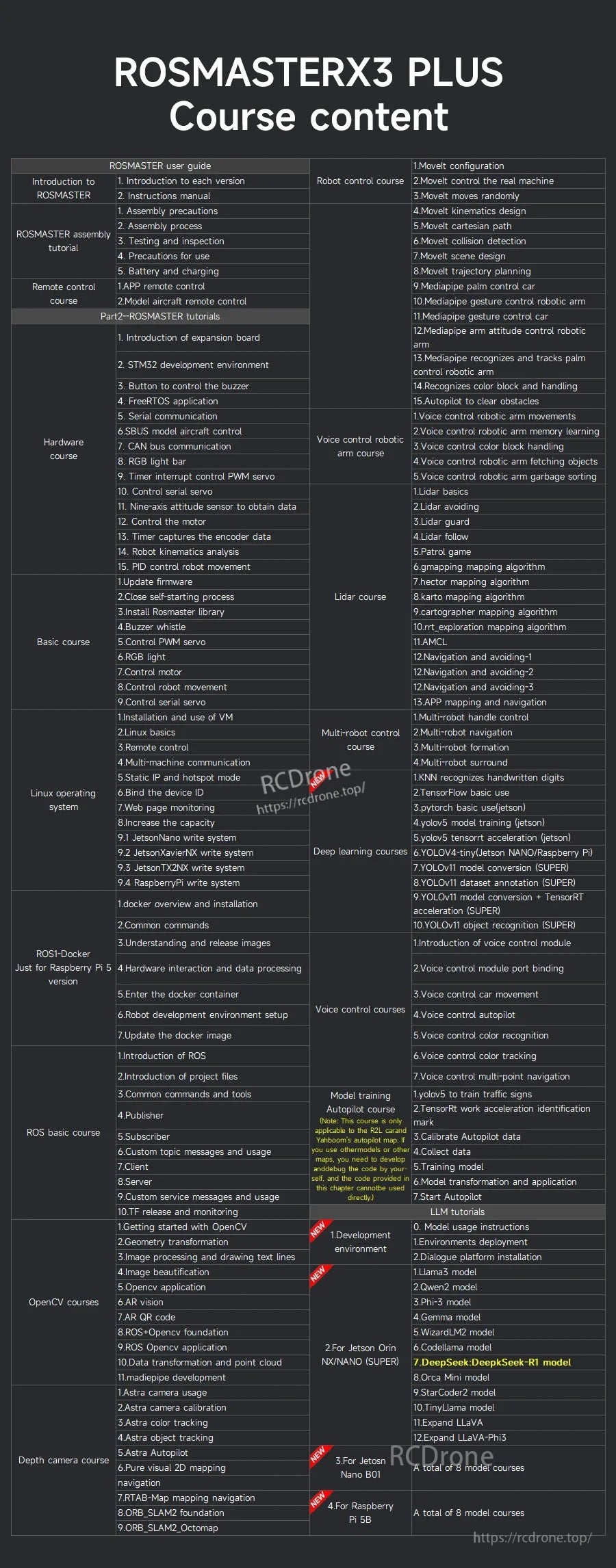
Зміст курсу ROSMASTER X3 PLUS включає налаштування, збірку та структурований набір уроків з програмування ROS та робототехніки.
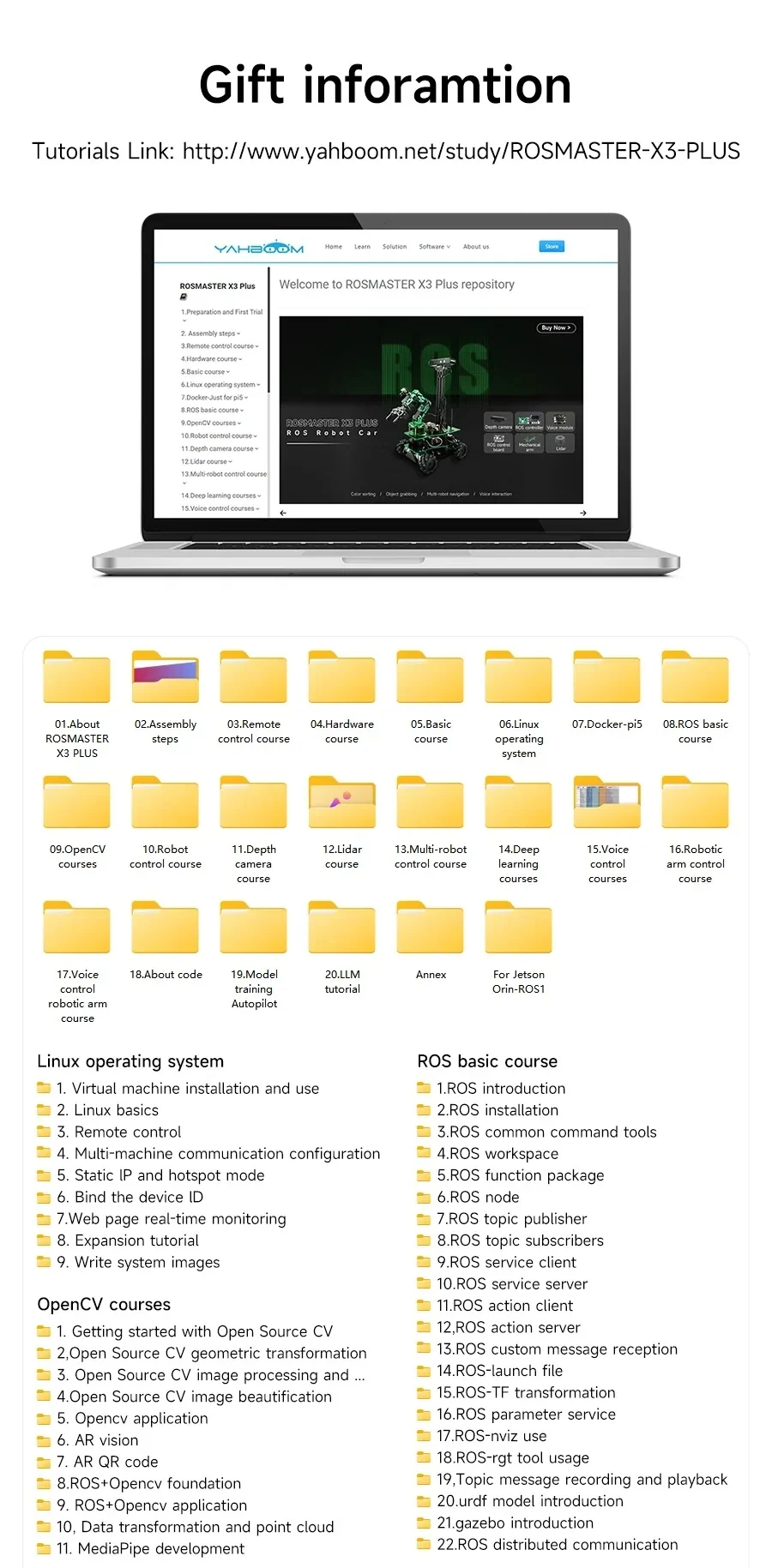
Yahboom ROSMASTER X3 PLUS включає доступ до навчальних матеріалів та курсів, що охоплюють основи Linux, OpenCV, налаштування та інструменти ROS.
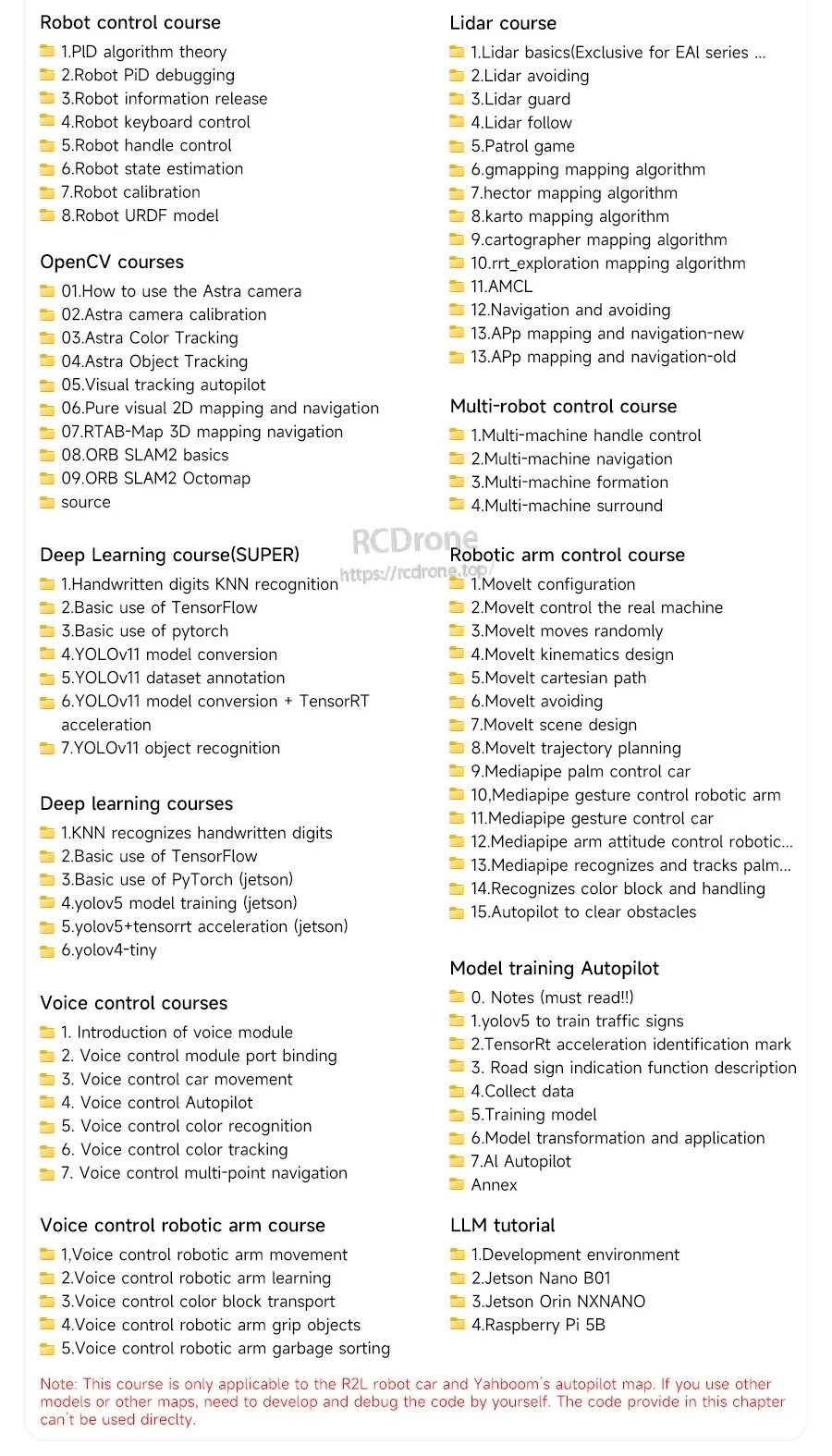
Навчальний контент ROSMASTER X3 PLUS охоплює основи управління роботами, а також модулі картографування з використанням лідара, управління кількома роботами, глибокого навчання та голосової взаємодії.
ROSMASTER X3 PLUS включає відеоуроки з англійськими субтитрами, що охоплюють налаштування, модулі, сенсори та проекти з вивчення ROS.
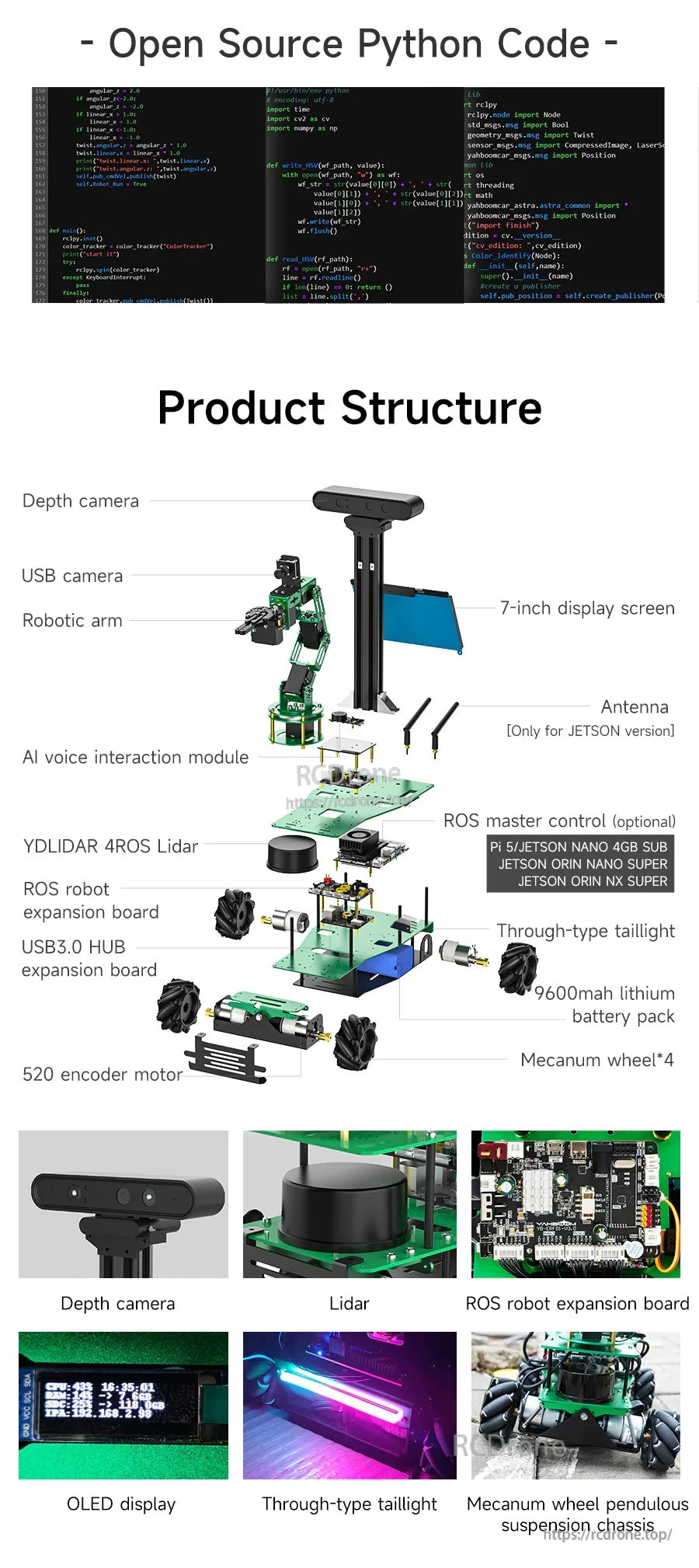
Структура робота ROSMASTER X3 PLUS поєднує 7-дюймовий дисплей, модулі лідара та камери, плати управління/розширення та колеса Mecanum для повної збірки.
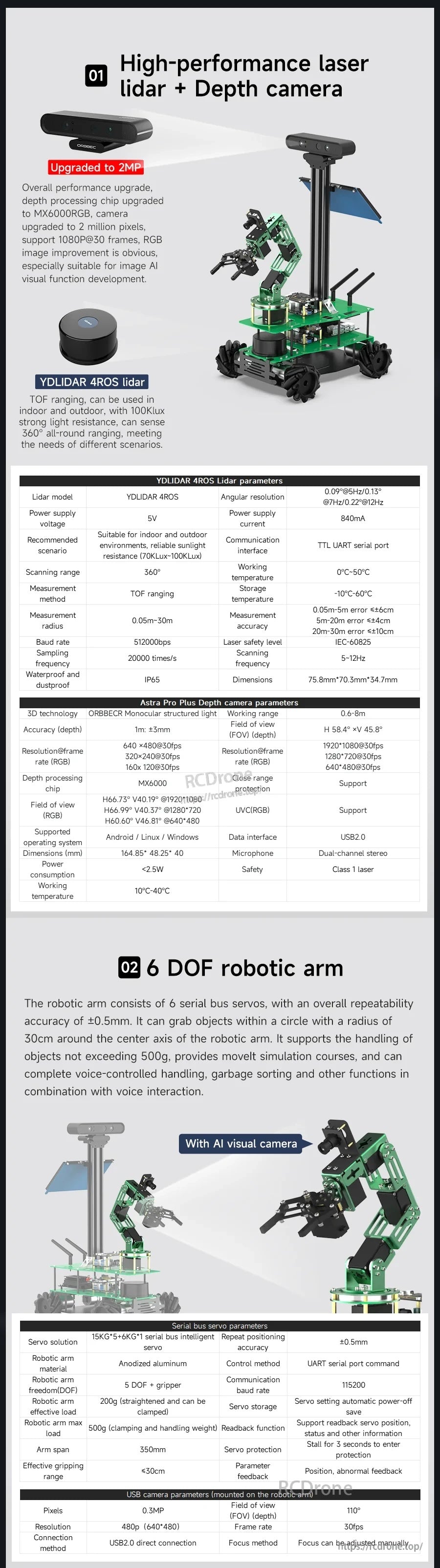
ROSMASTER X3 Plus поєднує лазерний лідар і камеру глибини на сенсорній щоглі з 6-DOF роботизованою рукою для навігації та експериментів з підйому та переміщення.
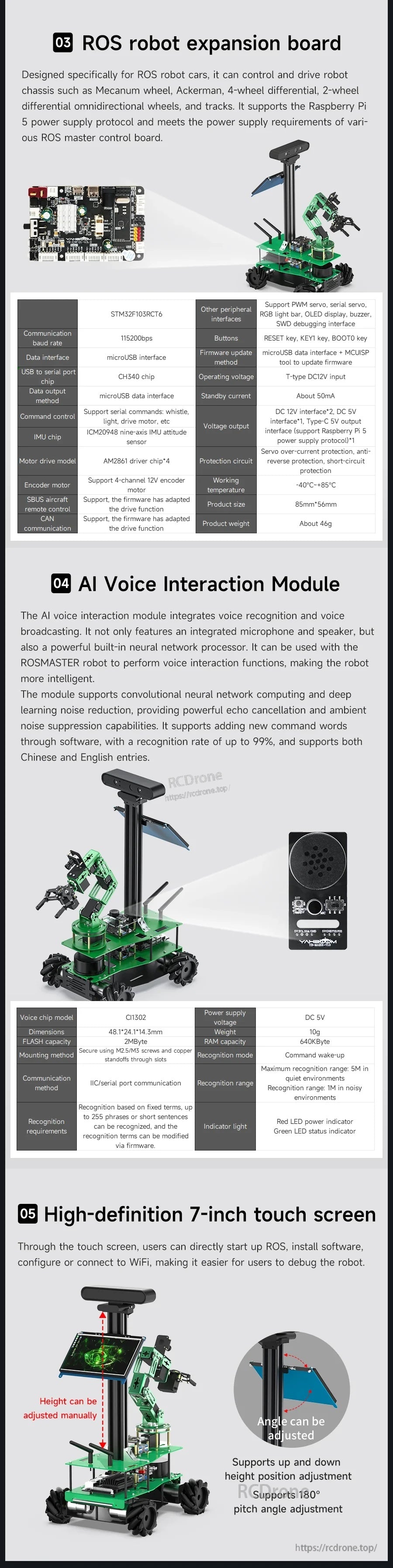
Платформа ROSMASTER X3 PLUS підтримує плату розширення, модуль голосової взаємодії з AI та опціональний 7-дюймовий сенсорний екран для керування та зворотного зв'язку.
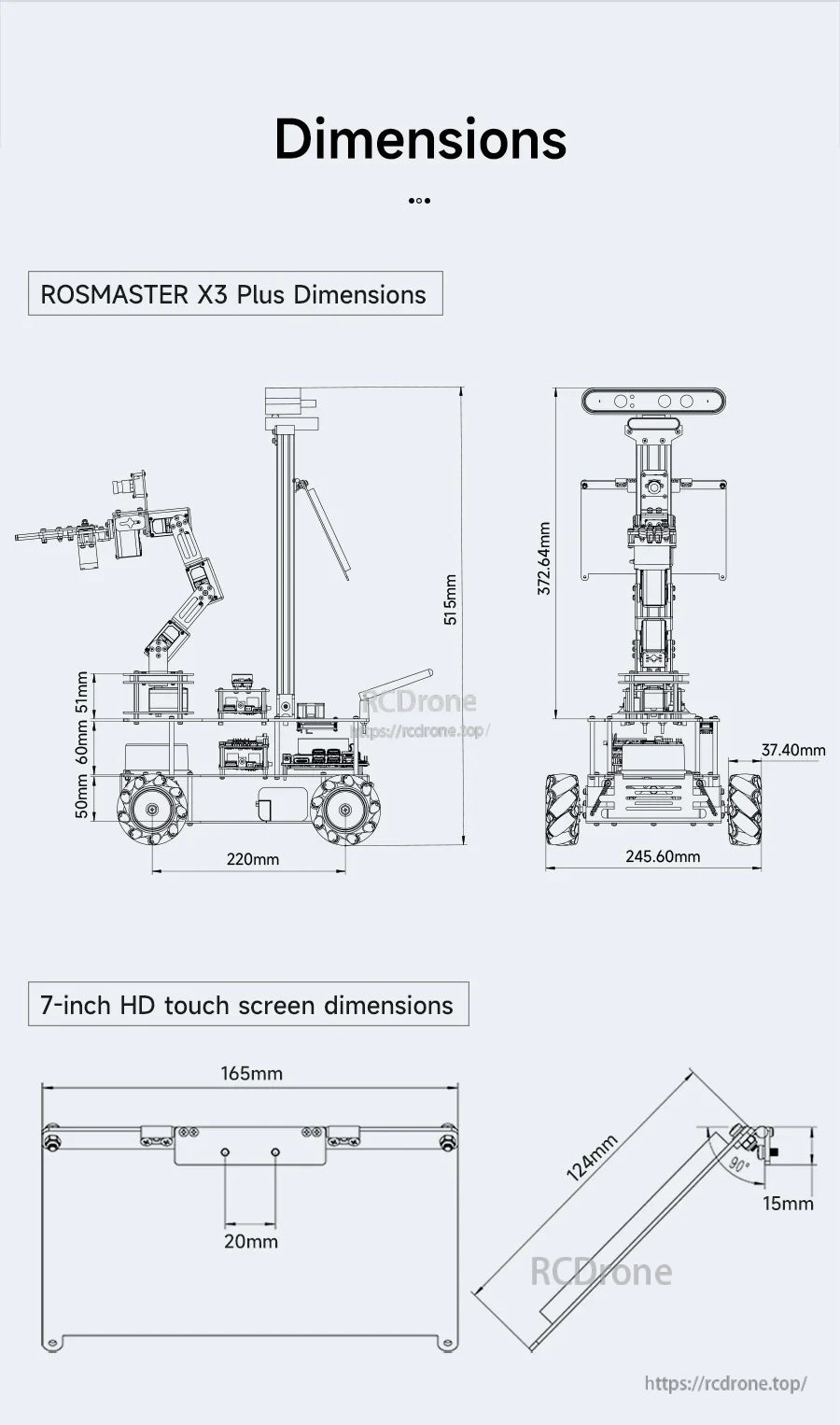
Схеми розмірів Yahboom ROSMASTER X3 Plus та вимірювання 7-дюймового HD сенсорного екрану допомагають планувати монтаж та загальну відповідність.
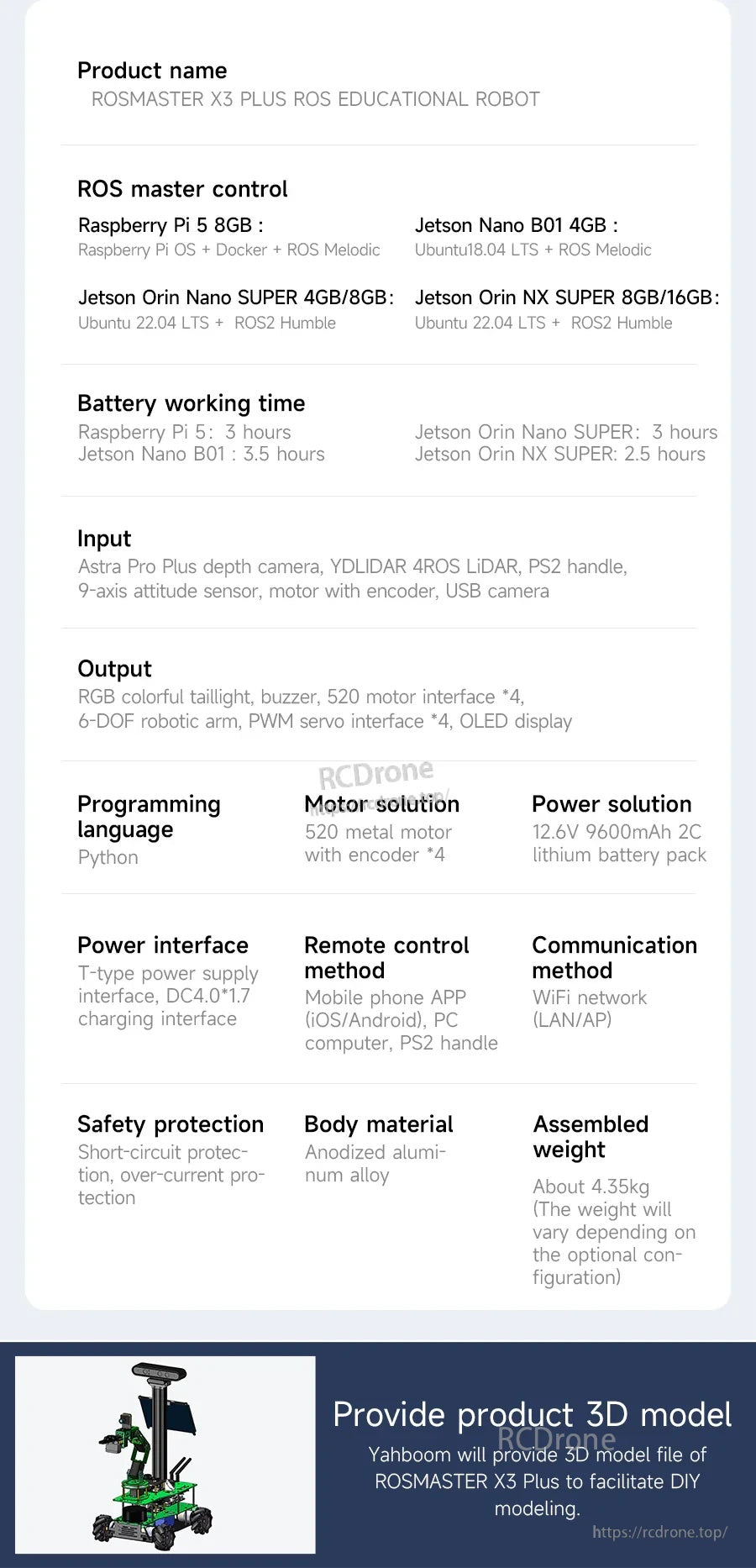
ROSMASTER X3 PLUS підтримує контролери Raspberry Pi або Jetson, з перерахованими вхідними сенсорами, Wi-Fi зв'язком та акумуляторним блоком 12.6V 6600mAh.
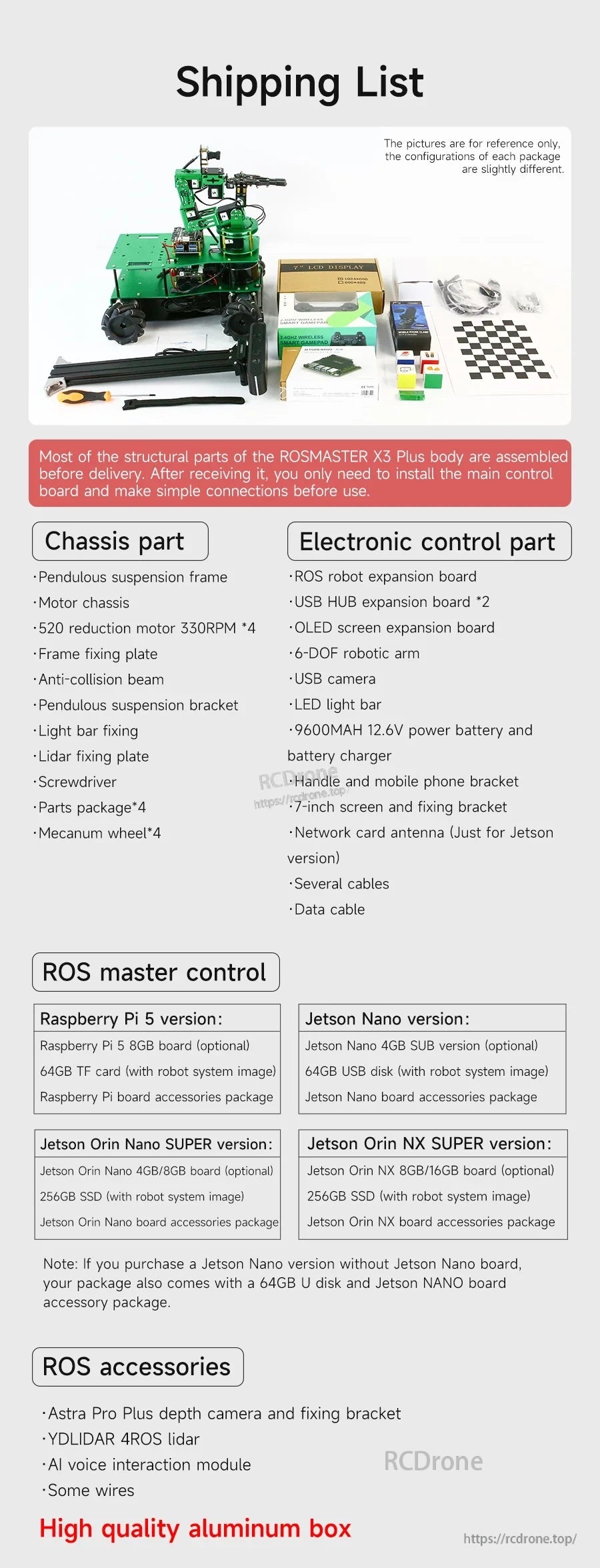
Набір ROSMASTER X3 Plus включає апаратне забезпечення шасі, електронні контрольні частини, опції головного контролю ROS та аксесуари, такі як камера та кронштейн для монтажу.

Робот Yahboom ROSMASTER X3 PLUS ROS постачається з роботизованою рукою на колісному шасі та жорстким алюмінієвим кейсом для транспортування.
Related Collections




















