ACFLY K9 多旋翼自動駕駛飛控器 – 雙IMU | 支援RTK | IP67防護等級 | 不支援APM / Pixhawk
ACFLY K9 多旋翼自動駕駛飛控器 – 雙IMU | 支援RTK | IP67防護等級 | 不支援APM / Pixhawk
ACFly
無法載入取貨服務供應情況
概述
ACFLY K9 自動駕駛飛行控制器是一款高性能的無人機控制系統,專為專業多旋翼應用而設計,如測量、檢查、安全和精準農業。該控制器具備雙IMU架構、集成ADRC抗干擾算法、RTK定位及IP67級防護,能在惡劣環境中提供準確、穩定和可靠的自主飛行。
憑藉豐富的外圍接口、實時多傳感器融合和強大的飛行穩定性,K9系統非常適合需要高精度和可靠性的工業無人機開發者和集成商。
主要特點
-
✅ 雙IMU冗餘: 確保在振動或磁場干擾下仍能穩定飛行
-
✅ 集成RTK (ZED-F9P): 實現高達2cm RTK精度; 支持NTRIP、本地基站
-
✅ 基於ADRC的控制: 自主參數調整,無需傳統PID
-
✅ 傳感器健康融合: 實時檢測傳感器異常並切換至最佳傳感器
-
✅ POS數據記錄: 記錄實時位置、方向及PPK準備的日誌文件
-
✅ 高兼容性: 支持相機觸發、雲台、雷達、LiDAR、LED和光流
✅ 完整介面支援: UART, CAN, I2C, PWM (14通道), USB, SWD
-
✅ 防水與堅固: IP67防護, 鋁合金外殼, 以及寬溫範圍
技術規格
| 項目 | 規格 |
|---|---|
| 型號版本 | K9 標準版 / K9 PRO (單 RTK) / K9 MAX (雙 RTK) |
| MCU | STM32H743VIT6 (480MHz, 16KB L1 快取) |
| IMU 感測器 | BMI088 + ICM20689 (雙加速度計), QMC5883 (磁力計), SPL06 (氣壓計) |
| RTK 晶片 | UBLOX ZED-F9P (PRO/MAX 版本內建) |
| GPS 模組 | UBLOX NEO-M9N + IST8310 |
| RTK 頻率 | 10Hz / 20Hz |
| RTK 精度 | 0。01–0.02米 (RTK), 0.3–0.4米 (非RTK) |
| GPS 精度 | 0.5–1.0m |
| GPS頻率 | 5Hz |
| 衛星系統 | GPS, GLONASS, 北斗, Galileo, SBAS, QZSS |
| 閃存 / TF存儲 | 8MB閃存 / 32GB TF卡 |
| 電壓檢測 | 0–90V × 2通道 |
| 電流檢測 | 0–200A × 1通道 |
| PWM通道 | 14 |
| 數據記錄 | 位置、姿態、PPK準備的POS記錄 |
| 保護等級 | IP67 |
| 外殼材料 | 6061鋁合金 |
| 工作溫度 | -40°C ~ +85°C |
| 電源輸入範圍 | 8V–87V |
尺寸與重量
| 組件 | 尺寸 (mm) | 重量 |
|---|---|---|
| 主 FC | 55 × 50 × 17 | 66g |
| GPS | φ46 × 10 | 28g |
| LED | 20 × 20 × 9 | 10g |
| RTK | φ25 × 57 | 16g |
地面站支持
-
🛰️ ACFLY GCS PRO: 支持完整的姿態反饋、任務規劃、波形分析、參數調整、校準和日誌導出
-
✅ 也兼容 QGroundControl (QGC) 和 Mission Planner (MP)
-
✅ POS 數據導出為 RINEX / TXT 格式,支持後處理 PPK 工作流程
接線與整合
-
支持連接到:
-
光流、雷達、OpenMV
-
雲台與相機觸發系統
-
雙電池設置
-
外部 LED、LiDAR 和超聲波傳感器
應用場景
-
高精度 地理空間測量
-
電力線和基礎設施 檢查
-
應急響應 和公共安全無人機
-
大面積 農業噴灑與地圖製作
無人機訓練和認證平台
詳細資訊

ACFLY K9 自動駕駛儀提供雙IMU、ADRC算法、穩定飛行、自定義航點、RTK/PPK支持、多種接口、存儲和耐用設計,適用於多旋翼飛行器。
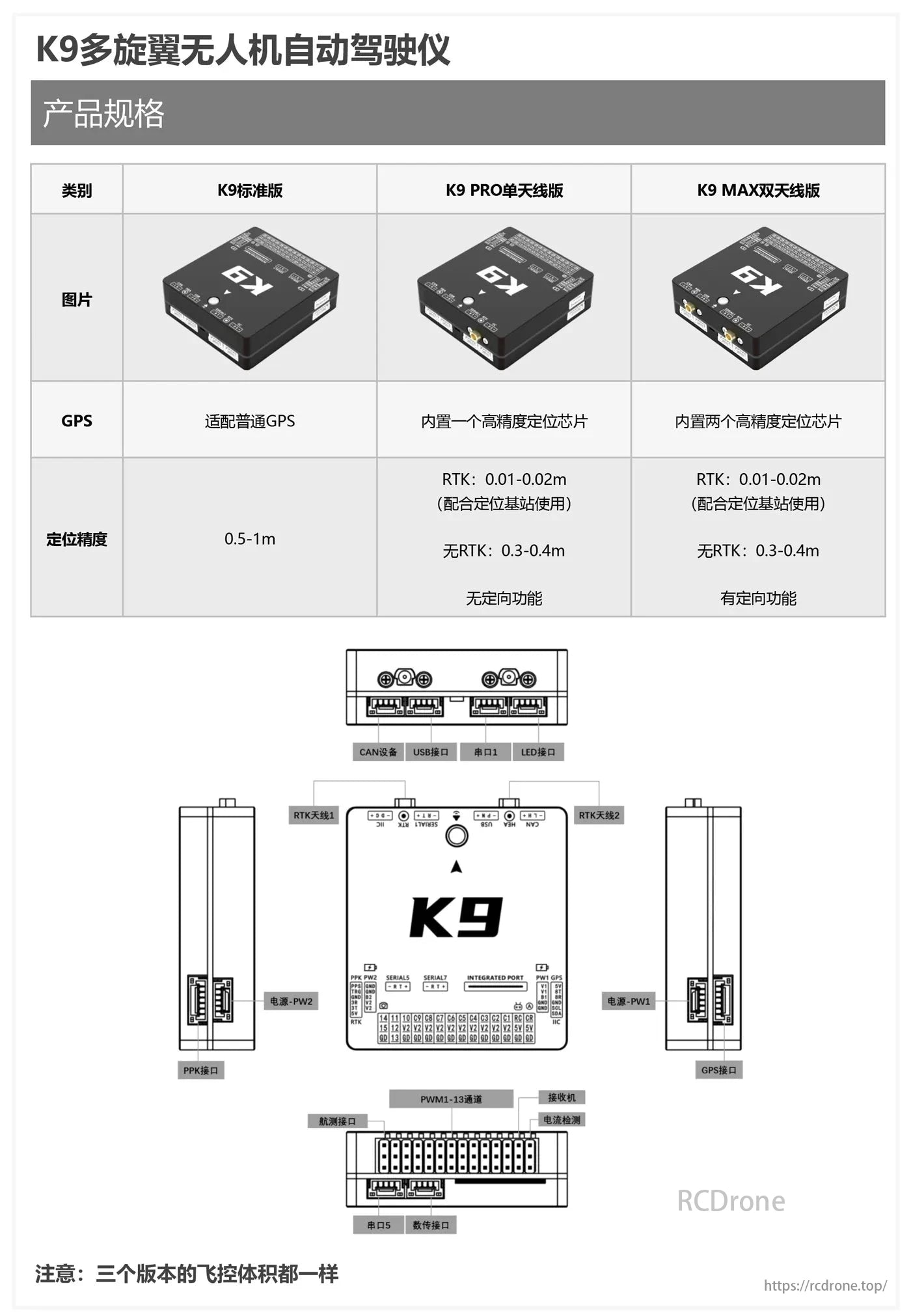
K9 自動駕駛儀有三個版本:標準版、PRO 版和 MAX 版。PRO 版和 MAX 版提供高精度 RTK GPS(0.01–0.02m 精度)。接口包括 CAN、USB、串行、LED、PWM 等。所有版本的尺寸相同。
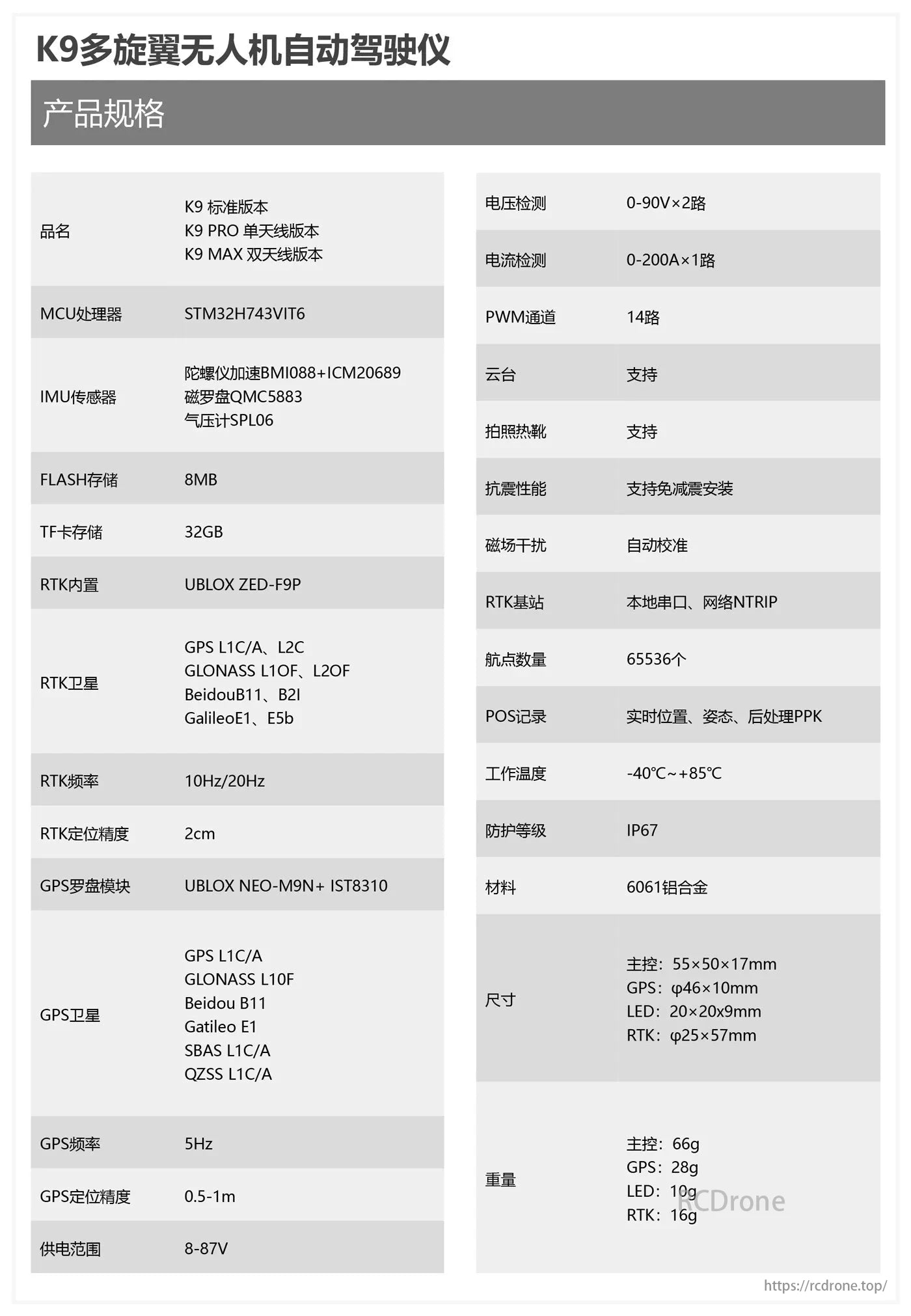
K9 自動駕駛儀包括 STM32H743VIT6 MCU、8MB 快閃記憶體、32GB TF 存儲、RTK GPS(2cm 精度),支持 PWM、電壓/電流檢測,工作溫度範圍為 -40°C 至 +85°C,並具備 IP67 防護等級。
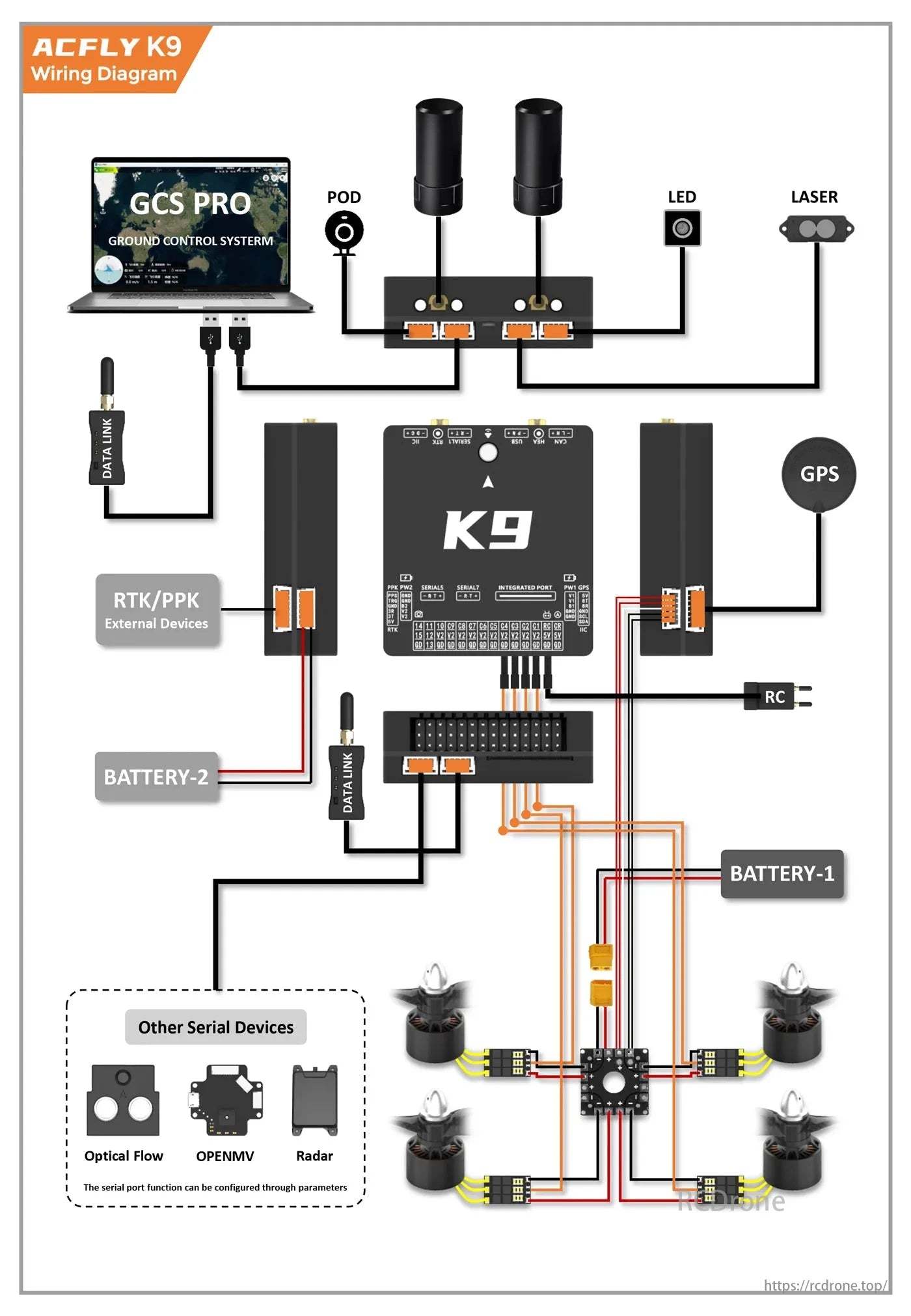
ACFLY K9 接線圖說明了多旋翼自動駕駛飛行控制器的連接。組件包括 GCS PRO、POD、LED、激光、GPS、RC 和兩個電池。RTK/PPK 支持外部設備。電機通過 ESC 連接。額外的串行設備如光流、OPENMV 和雷達可通過參數進行配置。數據鏈路確保地面控制系統與飛行控制器之間的通信。該圖提供了K9設置的全面概述,確保所有元素的正確整合,以實現最佳的無人機操作。
Related Collections