飛控類型
-

Betaflight 飛控器
Betaflight 飛行控制器是一款受歡迎的高性能控制器,專為賽車和自由飛行無人機設計。它優先考慮快速的反應時間和精確的控制,使飛行員能夠以最小的延遲執行複雜的動作和快速的賽車。Betaflight 是開源的,並且高度可定制,提供高級調整選項、PID 控制和與各種無人機組件的兼容性。它非常適合尋求在競爭性無人機飛行環境中獲得最大靈活性和控制的經驗豐富的飛行員。
-

ArdupiLot飛行控制器
探索我們的 ArduPilot 飛行控制器系列,採用頂級品牌的強大開源飛行控制器,如 CUAV、Matek、Pixhawk、Holybro、Radiolink等等。設計用於 多旋翼飛機、固定翼飛機和垂直起降飛機,這些控制器透過強大的 ArduPilot 生態系統支援先進的自動駕駛功能、即時遙測、GPS 整合和任務規劃。無論你是在建造 FPV 無人機、研究無人機還是工業平台,此系列都能提供 靈活、可靠且可擴展的解決方案 對於開發人員和專業人士。
-

SpeedyBee 飛控器
SpeedyBee 提供多樣化的高性能飛行控制器,適用於 FPV 無人機,滿足初學者和經驗豐富的飛行員的需求。SpeedyBee F7 V3 系列,配備 50A Stack 和 BL32 技術,支持...
-

Matek飛行控制器
這 Matek 飛行控制器 該系列提供各種高性能飛行控制器,專為各種無人機應用而設計,包括賽車、FPV、固定翼和多旋翼無人機。具有先進的模型,如 Matek H743-SLIM 內建OSD和MPU6000, Matek F411-WTE 對於 FPV 競速無人機,這些控制器可確保穩定且靈敏的飛行。無論您是無人機愛好者還是專業人士,該系列還包括具有雙...
-

Kakute飛行控制器
這 Kakute飛行控制器 Holybro 系列專為 FPV 無人機、固定翼飛機和 VTOL 應用而設計,提供高性能飛行控制、精確導航以及與 BetaFlight、iNav 和 ArduPilot 的無縫整合。這些控制器採用...







通過飛控應用
-

農業無人機飛行控制器
飛行控制器(FC)作為農業無人機的大腦,負責協調飛行控制、定位、視頻傳輸、傳感器測量和噴灑操作。在這個領域的領先品牌中,JIYI 和 BoYing 是其中的佼佼者,像 JIYI K++V2 和 K3Pro 這些型號因其精確性和多功能性而特別受歡迎。這些飛行控制器旨在滿足現代農業的複雜需求,使無人機即使在挑戰性條件下也能穩定飛行,這對於精確噴灑和在廣闊農田上進行準確定位等任務至關重要。此外,先進的視頻傳輸集成允許實時監控,這對於快速做出明智的決策至關重要。JIYI 和 BoYing 的飛行控制器還支持多傳感器集成,使得能夠收集有關作物健康和環境條件的全面數據。這項能力對於優化農藥和營養素的施用、減少浪費以及最小化環境影響至關重要。總體而言,這些飛行控制器提高了農業作業的效率,有助於改善作物健康和增加產量,展示了先進技術在改變現代農業中的重要角色。




飛控品牌
-

JIYI 飛行控制器
JIYI 專注於農業和工業無人機的先進自動駕駛系統。其產品線包括 K++ V2,配備雙 CPU 和雷達集成,實現精確、安全的農業噴灑;K3A Pro,針對智能農藥流量控制和易用性進行優化;以及 KX 系列,專為電力檢查、物流和測繪等高要求的工業任務而設計。JIYI 控制器支持 GPS、RTK、CAN-HUB 和地形跟隨雷達,提供高可靠性、靈活的操作模式和可定制的...
-

Holybro自動駕駛飛行控制器
探索 Holybro 自動駕駛飛行控制器 系列,為固定翼、垂直起降、多旋翼和自動駕駛汽車提供先進的解決方案。來自強大的 Pixhawk 6X Pro 緊湊 Pixhawk 6C 迷你,對於多才多藝的 角手...
-
CUAV自動駕駛飛行控制器
CUAV自動駕駛飛行控制器 提供工業級性能並與 PX4 和 ArduPilot 系統相容。特色模特兒如下 Pixhawk V5+、V6X、X7+、Nora 與 7-Nano,它們支援 CAN/RTK GNSS、空速、遙測和高壓電源模組。配備...
-

IFLIGHT飛行控制器
iFlight 飛行控制器:FPV 無人機的精確控制 iFlight 提供 高性能飛行控制器 設計用於 FPV 競速、自由式和遠端應用。特色 BLITZ、SucceX 和 Defender...
-

GEPRC飛行控制器
探索 GEPRC 飛行控制器 系列——用於 FPV 無人機的高性能 AIO 和堆疊系統。特色 F4/F7 晶片,12A–70A ESC,支援 2–6S...





-
SpeedyBee F405 V4 BLS 55A 30x30 飛控&電調堆疊
定價 從 $49.00 USD 起定價單價 每 -
SpeedyBee F405 迷你 BLS 35A 20x20 堆疊
定價 從 $62.00 USD 起定價單價 每 -
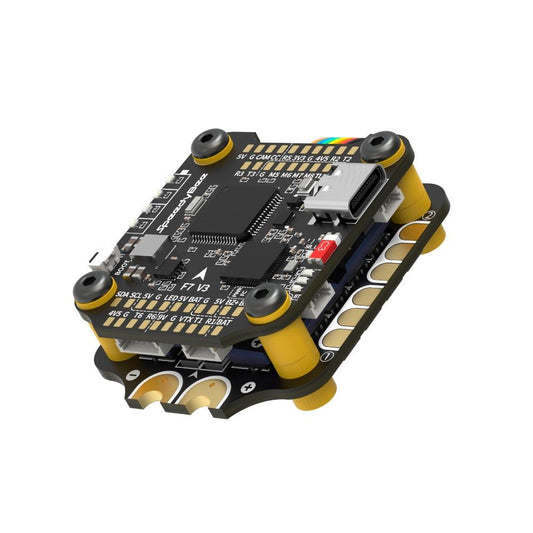
SpeedyBee F7 V3 飛控
定價 $63.00 USD定價單價 每 -
Mateksys H743-SLIM V4 飛控板,STM32H743 雙 ICM42688P,DPS368,2-8S,USB-C,OSD
定價 $129.00 USD定價單價 每$0.00 USD售價 $129.00 USD -
SpeedyBee F405 V5 OX32 55A 30x30 模型飛機飛控 & 4合1電調組,配備 ICM42688 陀螺儀、STM32F405、無線調校 & 16MB 黑盒
定價 從 $69.00 USD 起定價單價 每 -
SpeedyBee F405 AIO 40A Bluejay 25.5x25.5 3-6S 飛行控制器
定價 $110.60 USD定價單價 每 -
Foxeer F722 V4 Mini MPU6000 飛控
定價 $85.00 USD定價單價 每 -
Matek Mateksys 飛控板 - 2022全新 H743-WING V3 H743 適用於FPV競速無人機固定翼
定價 $156.18 USD定價單價 每 -
Matek H743-SLIM 飛行控制器,帶 OSD - 5V BEC MPU6000 內建 OSD 無電流感測器,適用於遙控賽車無人機多旋翼多旋翼機
定價 $114.54 USD定價單價 每 -
MATEK F405-WING-V2 固定翼飛控板 - STM32F405, ICM42688-P, OSD, 10 PWM
定價 $85.00 USD定價單價 每$0.00 USD售價 $85.00 USD -
SpeedyBee F7 V3 BL32 50A 30x30 堆棧黑盒數據分析 iNAV Betaflight Emuflight 無線固件刷新器
定價 從 $65.40 USD 起定價單價 每 -
AeroEggTech AET-H743-Basic H743 飛控板,適用於 ArduPilot 固定翼/垂直起降機,10A BEC,雙 IMU
定價 從 $69.00 USD 起定價單價 每 -
Flywing ACE 直升機飛控 FBL 陀螺儀 H1 升級版,內建 M10 GPS 與協調轉彎
定價 $239.00 USD定價單價 每 -
Flywing H2 直升機飛控 FBL 陀螺儀(H1升級版),配備雙GPS、CAN總線、12S電壓檢測
定價 $379.00 USD定價單價 每 -
SpeedyBee BT Nano 3 無線 FC 配置
定價 $19.00 USD定價單價 每 -
MATEK H743-WLITE - Mateksys 飛行控制器
定價 $139.39 USD定價單價 每 -
Pixhawk PX4 PRO PIX 32 位元飛行控制器自動駕駛儀 - 附 4G SD RC 四軸飛行器 Ardupilot ArduPlane ArduRover
定價 從 $130.31 USD 起定價單價 每 -
Hobbywing XRotor F7 飛控 + 65A 30x30mm 四合一電調 FPV 組合,AM32,支援 DJI 即插即用
定價 從 $69.00 USD 起定價單價 每 -
RadioLink F405 飛控板 – 32位元 STM32F405,6通道輸出,內建OSD,兼容 ArduPilot/Betaflight/INAV
定價 從 $39.00 USD 起定價單價 每 -
Foxeer F722 V4 飛控 X8 DJI Type-C
定價 $62.00 USD定價單價 每 -
Foxeer F722 V4 MPU6000 FC 8S 雙 BEC 氣壓計 X8 飛行控制器
定價 $85.00 USD定價單價 每 -
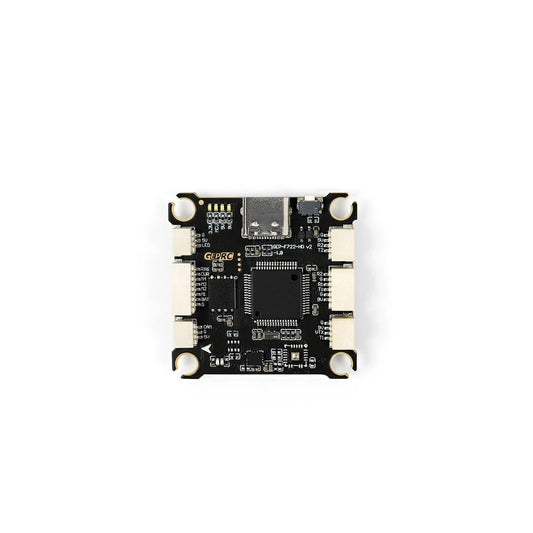
GEPRC GEP-F722-HD V2 飛行控制器 3-6S LiPo 16M 黑盒子 ICM42688-P 系統 RC FPV 賽車無人機四軸飛行器配件
定價 從 $53.00 USD 起定價單價 每 -
T-motor F7 HD Stack F7 HD 飛行控制器適用於 + F55A Pro II ESC 適用於 FPV 遙控無人機自由式賽車四軸飛行器
定價 從 $75.00 USD 起定價單價 每 -
GEPRC TAKER H743 BT 32位 65A 堆疊 - STM32H743,雙陀螺儀,藍牙調校,512M 黑盒
定價 從 $94.00 USD 起定價單價 每 -
CUAV X25 EVO 自動駕駛飛控器 - STM32H7,三重IMU,雙氣壓計,RM3100,CAN,16路PWM,支援PX4/ArduPilot
定價 從 $446.00 USD 起定價單價 每 -
GEPRC TAKER F745 BT 60A 飛控堆疊-雙陀螺儀,512MB 黑盒,藍牙,8馬達輸出
定價 $112.00 USD定價單價 每 -
Foxeer F405 V2(插頭)飛行控制器 + Reaper 55A ESC 8S Stack 視訊切換器 伺服測速儀
定價 從 $65.00 USD 起定價單價 每 -
Pixhawk PX4 PIX 2.4.8 32位元飛控+RGB+OLED+安全開關+蜂鳴器+PPM+I2C+ 4G SD
定價 從 $132.28 USD 起定價單價 每 -
Pixhawk 2.4.8 PX4 PIX 32 位元飛行控制器 - M8N GPS / Wifi 遙測模組 / 安全開關蜂鳴器 RGB I2C 4G SD OSD / OLED
定價 從 $10.96 USD 起定價單價 每 -
APM2.8 APM 2.8 飛控Ardupilot +M8N GPS內建指南針+GPS支架+避震器適用於遙控四軸飛行器多軸飛行器
定價 從 $104.90 USD 起定價單價 每 -
CUAV 全新 X7+ 飛行控制器 NEO 3 Pro GPS Pixhawk 開源 PX4 ArduPilot GNSS FPV 遙控無人機 VTOL 四軸飛行器組合
定價 從 $407.11 USD 起定價單價 每 -
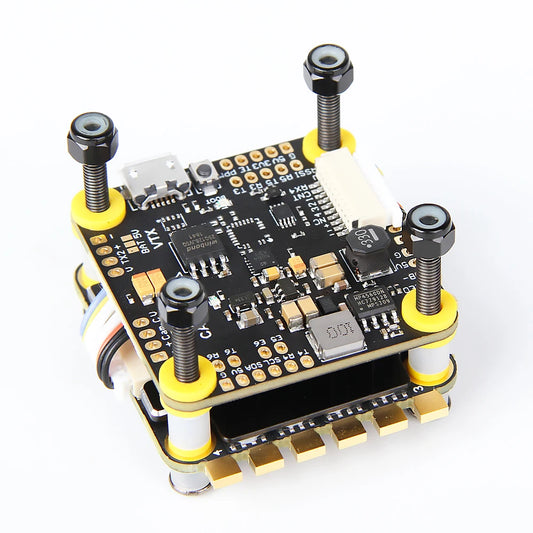
集翼K++飛控-雙CPU選用避障雷達專用農用無人機
定價 從 $49.27 USD 起定價單價 每 -
全新 BaseCam Simplebgc 32 位元擴充無刷萬向節控制器版本 3.6,附編碼器,適用於 5D2 5D3 BMCC 相機
定價 $312.17 USD定價單價 每 -
RadioLink Byme-A 固定翼飛行控制器 – 支援垂直起降,6種飛行模式
定價 $29.90 USD定價單價 每 -
CUAV X25 EVO Pixhawk 自動駕駛飛控 – 支援 PX4 / ArduPilot,次世代無人機系統核心
定價 從 $446.00 USD 起定價單價 每