Holybro Pixhawk Jetson 底板套裝,附 6X / 6X Pro 和 NVIDIA Jetson
Holybro Pixhawk Jetson 底板套裝,附 6X / 6X Pro 和 NVIDIA Jetson
HolyBro
無法載入取貨服務供應情況
概述
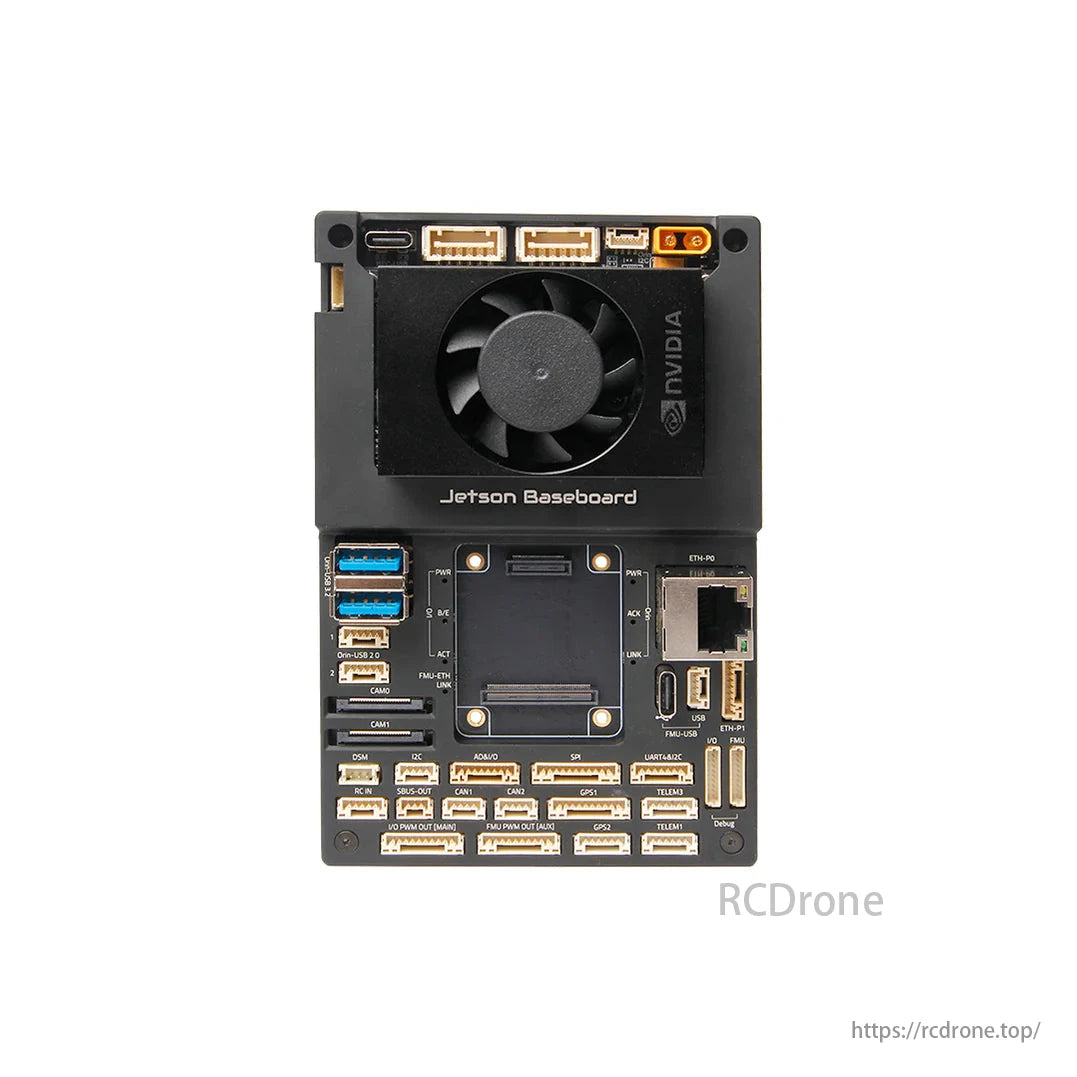
這 Holybro Pixhawk Jetson 底板 是基於設計的 Pixhawk 自動駕駛儀匯流排 (PAB) 開源規範 並與無縫集成 NVIDIA Jetson Orin NX/Nano 載板。這 PAB 外形尺寸 允許與任何 PAB 飛行控制器相容,包括 像素鷹 6X。該板結合了計算能力 英偉達傑特森 具備飛行控制能力 皮克斯霍克,使其成為先進自主應用的理想選擇。
主要特點
-
統一系統: 聯合收割機 皮克斯霍克 和 英偉達傑特森 在單板上。
-
無縫連接: Jetson 和 Pixhawk 透過以下方式進行通信 UART、CAN 和乙太網路交換機。
-
廣泛的兼容性: 支援 Jetson Orin NX 和 Orin Nano。
-
高速擴充: 特徵 2x M.2 鑰匙槽 適用於 WiFi/藍牙和 NVMe SSD。
-
Pixhawk 6X 整合: 配備 ICM-45686 感測器 以增強飛行控制。
處理器和感測器
FMU 處理器:
-
STM32H753
-
32 位元 ARM Cortex-M7,480MHz
-
2MB 快閃記憶體、1MB 內存
IO處理器:
-
STM32F103
-
32 位元 ARM Cortex-M3,72MHz
-
64KB靜態記憶體
板載感測器 (Rev8)
-
加速度計/陀螺儀: 3x ICM-45686 (採用 BalancedGyro™ 技術)
-
晴雨表: ICP20100 & BMP388
-
磁力計: BMM150
底板連接埠和連接
傑特森連接器
-
2 個千兆位元乙太網路埠 (透過連接到 Jetson 和 Autopilot RTL8367S乙太網路交換機)
-
2x MIPI CSI 相機輸入 (每條 4 條車道, 22 針 Raspberry Pi 攝影機 FFC)
-
2 個 USB 3.0 主機連接埠 (USB-A,5A 電流限制)
-
2 個 USB 2。0 主機連接埠 (5 針 JST-GH)
-
用於偵錯的 USB 2.0 (USB-C)
-
迷你 HDMI 輸出
-
2x M.2 插槽:
-
用於 NVMe SSD (PCIEx4) 的金鑰 M (2242)
-
用於 WiFi/BT(PCIEx2、UART、USB、I2S)的 E 鍵 (2230)
-
-
CAN埠 (連接到 自動舵CAN2, 4 針 JST-GH)
-
SPI、I2C、I2S、UART 端口 (各種JST-GH連接器)
-
風扇電源介面
-
電源輸入: XT30 連接器,7-21V (3S-4S)
-
UBEC 12A (3-14S) 推薦用於 >4S 應用
自動駕駛儀連接器
-
Pixhawk 自動駕駛儀匯流排介面: 100 針和 50 針 Hirose DF40
-
冗餘數位電源模組輸入
-
I2C 功率監視器支持
-
GPS 和安全開關連接埠: 10 針和 6 針 JST-GH
-
2x CAN 連接埠(4 針 JST-GH)
-
3x 遙測連接埠(JST-GH,其中一個連接到 Jetson 的 UART1)
-
16 個 PWM 輸出(2x 10 針 JST-GH)
-
USB 2.0(USB-C 和 4 針 JST-GH)
-
DSM 輸入(3 針 JST-ZH,1.5 毫米間距)
-
RC 輸入(PPM/SBUS,5 針 JST-GH)
-
用於外部感測器匯流排的 SPI 連接埠(SPI5,11 針 JST-GH)
-
2x 偵錯連接埠(FMU 和 IO,10 針 JST-SH)
電源需求
-
輸入電壓: 7-21V (3S-4S) 透過 XT30 連接器
-
最低功率需求: 8V/3A(依週邊不同而不同)
-
支援外部 UBEC 12A (3-14S),用於冗餘和更高電壓應用
-
內建過壓保護
尺寸和重量
-
板尺寸: 126×80×38毫米 (不含 Jetson 和飛行控制器)
-
重量: 203.2克 (包括Jetson、散熱器、飛控、SSD、Wi-Fi模組)
UBEC-12A 規格
-
輸入電壓: 3~14S (XT30)
-
輸出電壓: 6.0V/7.2V/8.0V/9.2V (Jetson 建議使用 7.2V)
-
連續輸出電流: 12A
-
突發輸出電流: 24A
-
尺寸: 48×33.6×16.3毫米
-
重量: 47.8克
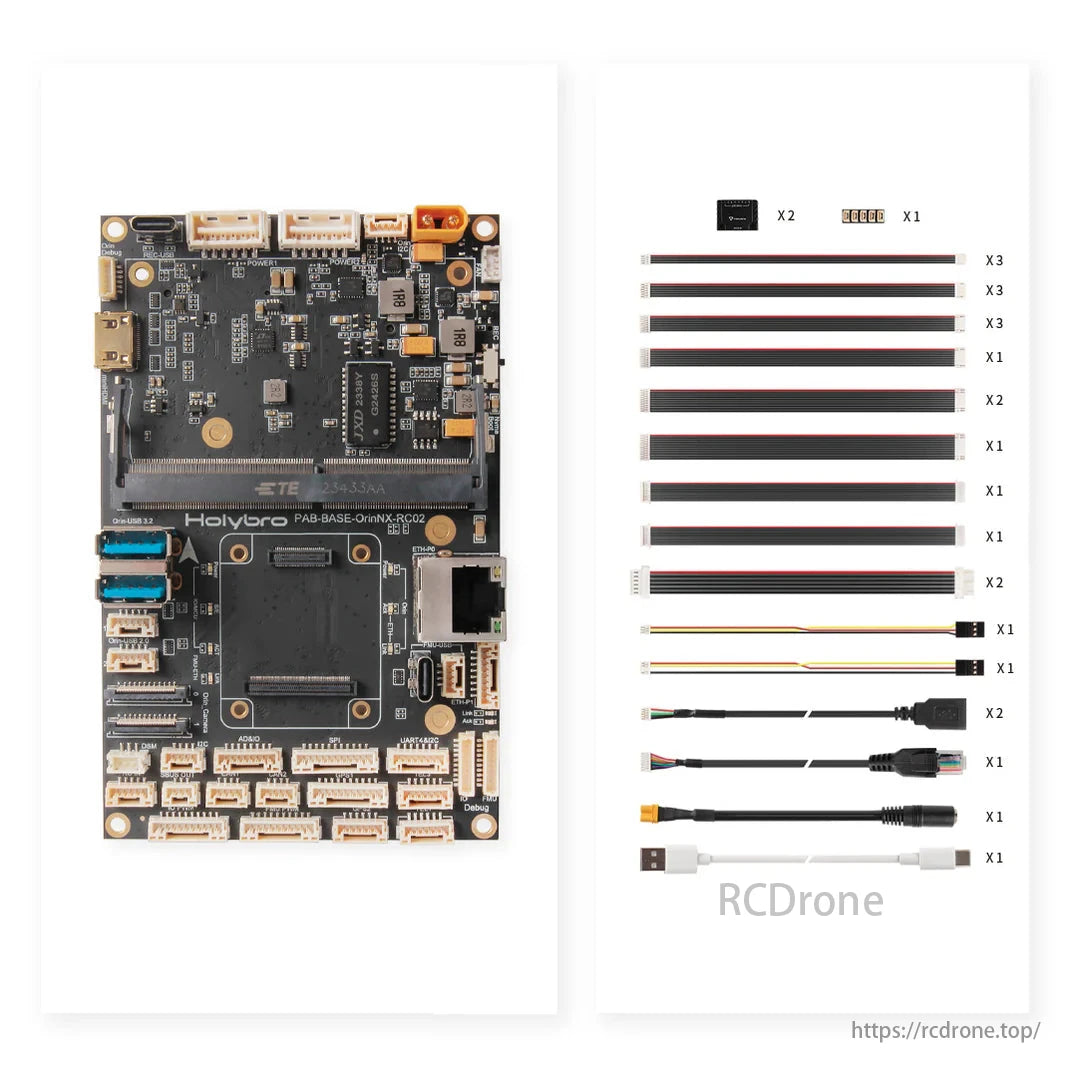
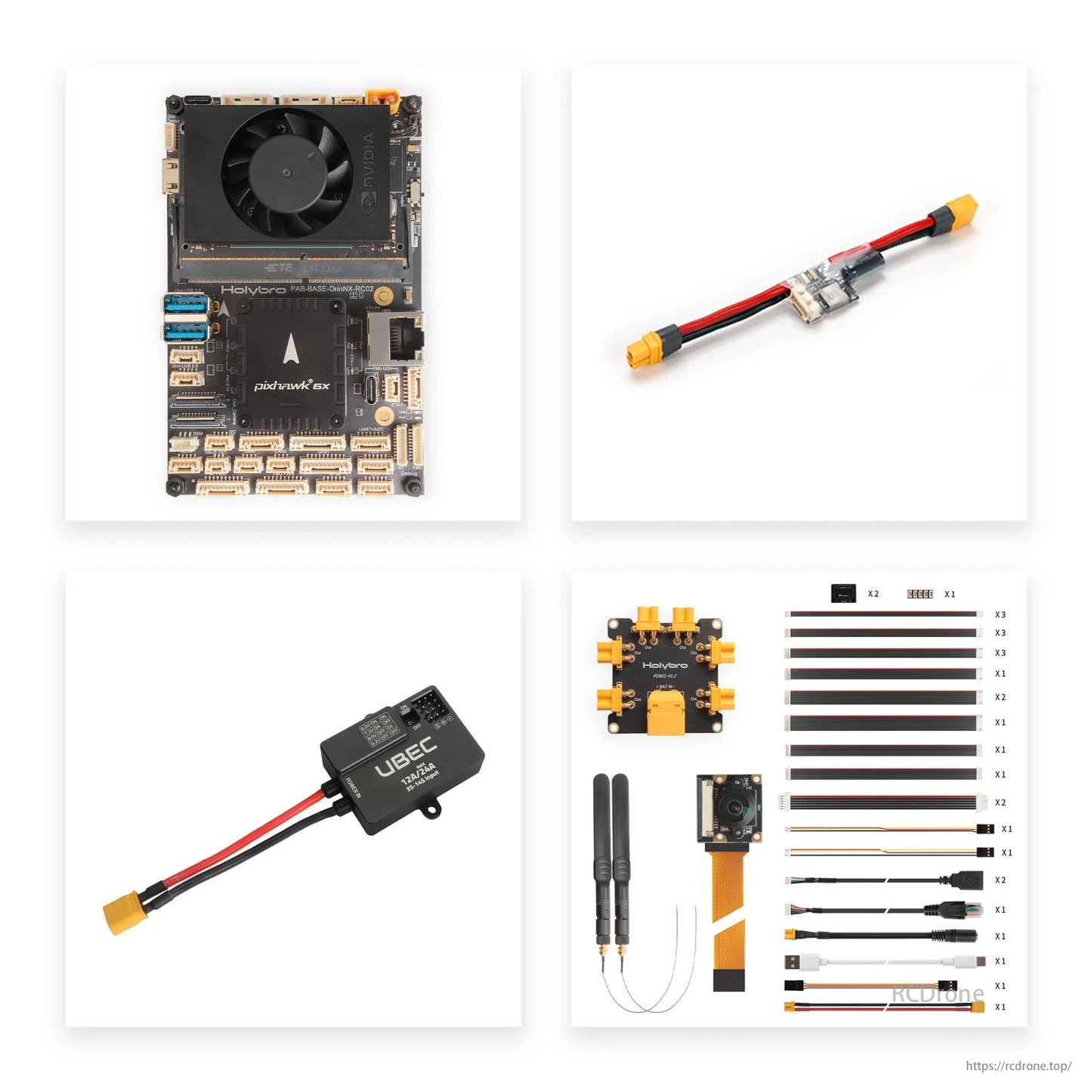
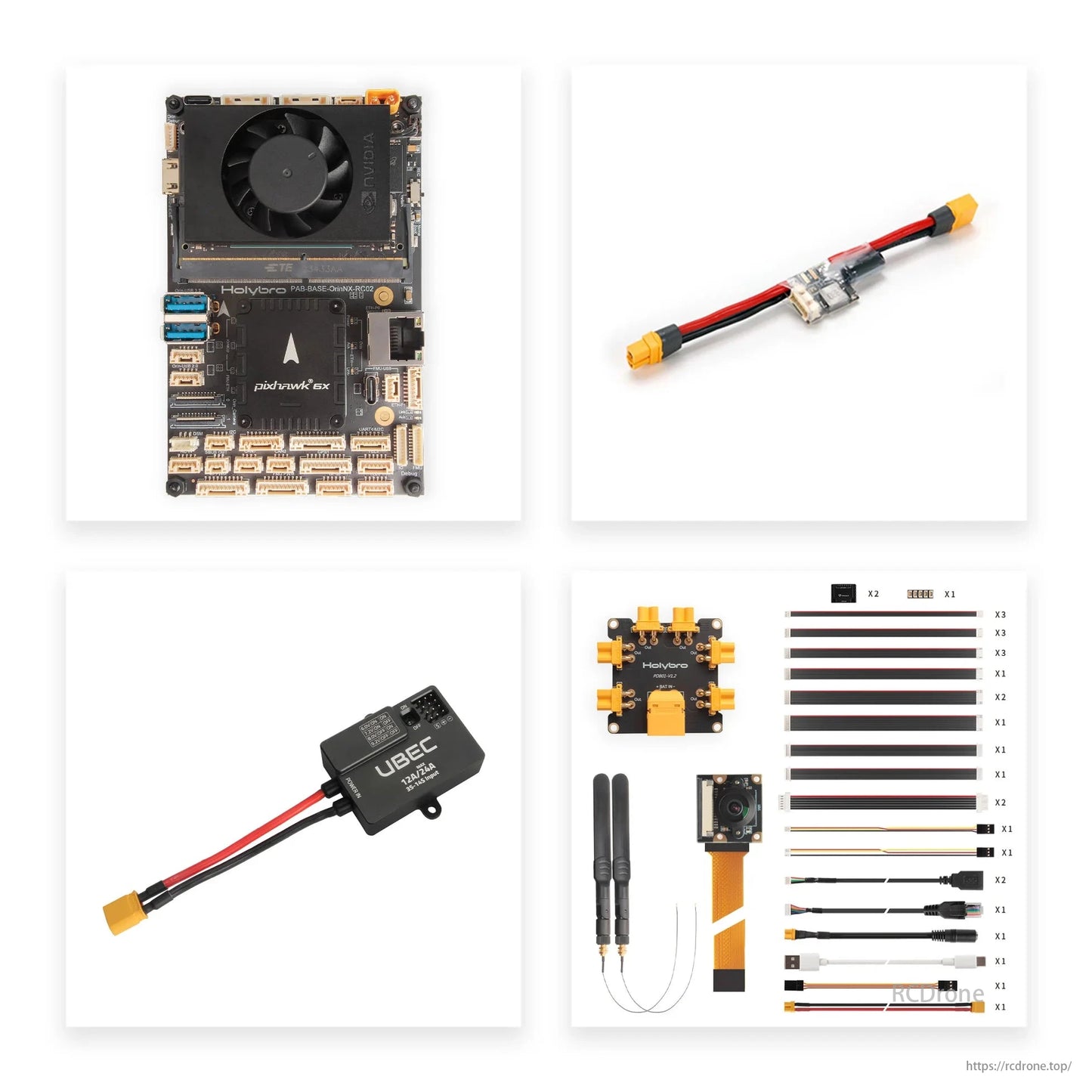
包裝內容
Pixhawk 6X 捆綁包
-
Pixhawk 6X (ICM-45686) 飛行控制器模組
-
Pixhawk Jetson Orin 底板
-
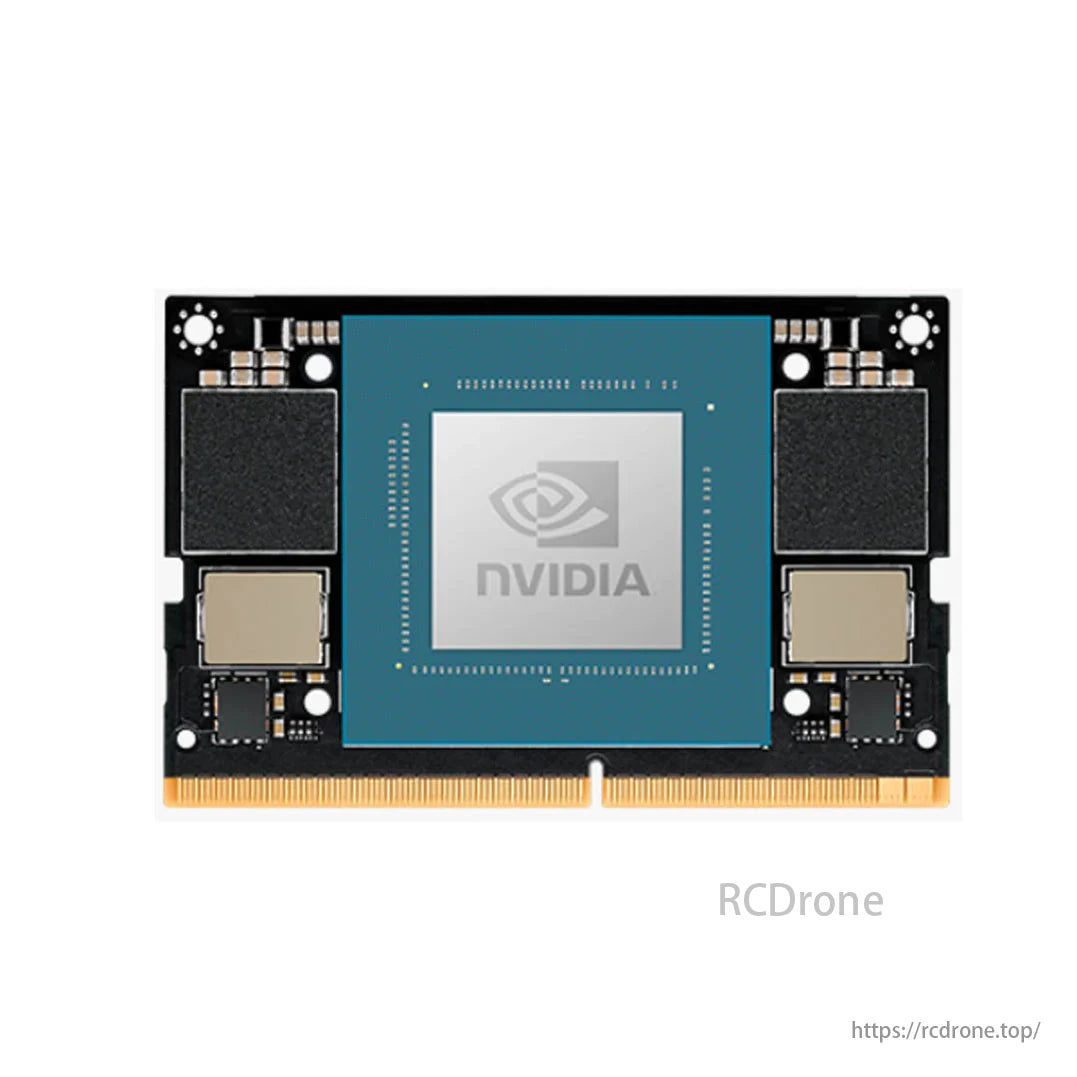
Nvidia Orin NX (16GB RAM) / Orin Nano (4GB RAM) 附散熱器和風扇
-
固態硬碟: 三星PM9B1 PCIe 4。0 NVMe 512GB
-
Wi-Fi 與藍牙模組: 英特爾8265NGW 交流雙頻 / Realtek RTL8B22CE
-
相機: IMX219-200
-
PM02D電源模組
-
UBEC 12A (3-14S)
-
PDB 板和電纜組
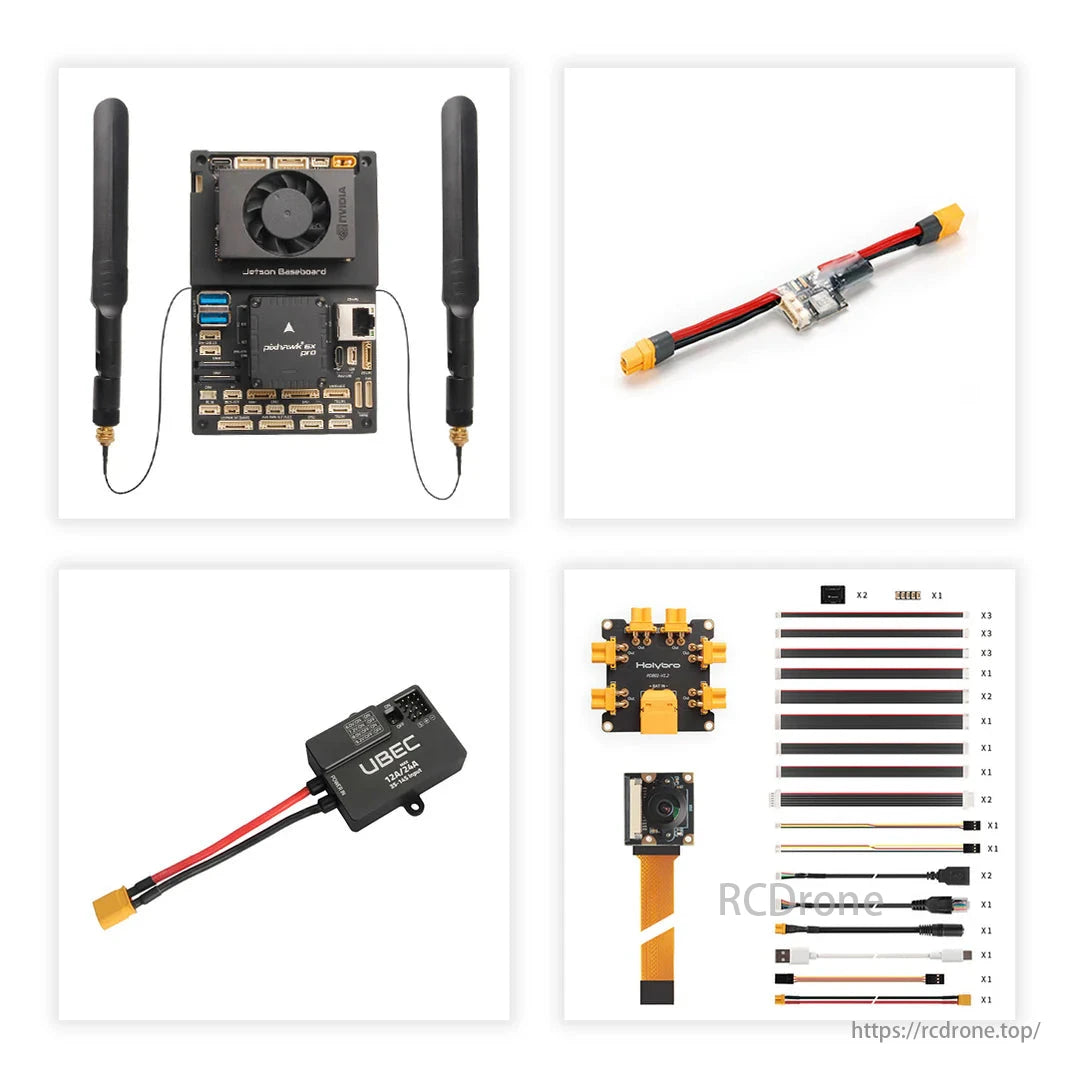
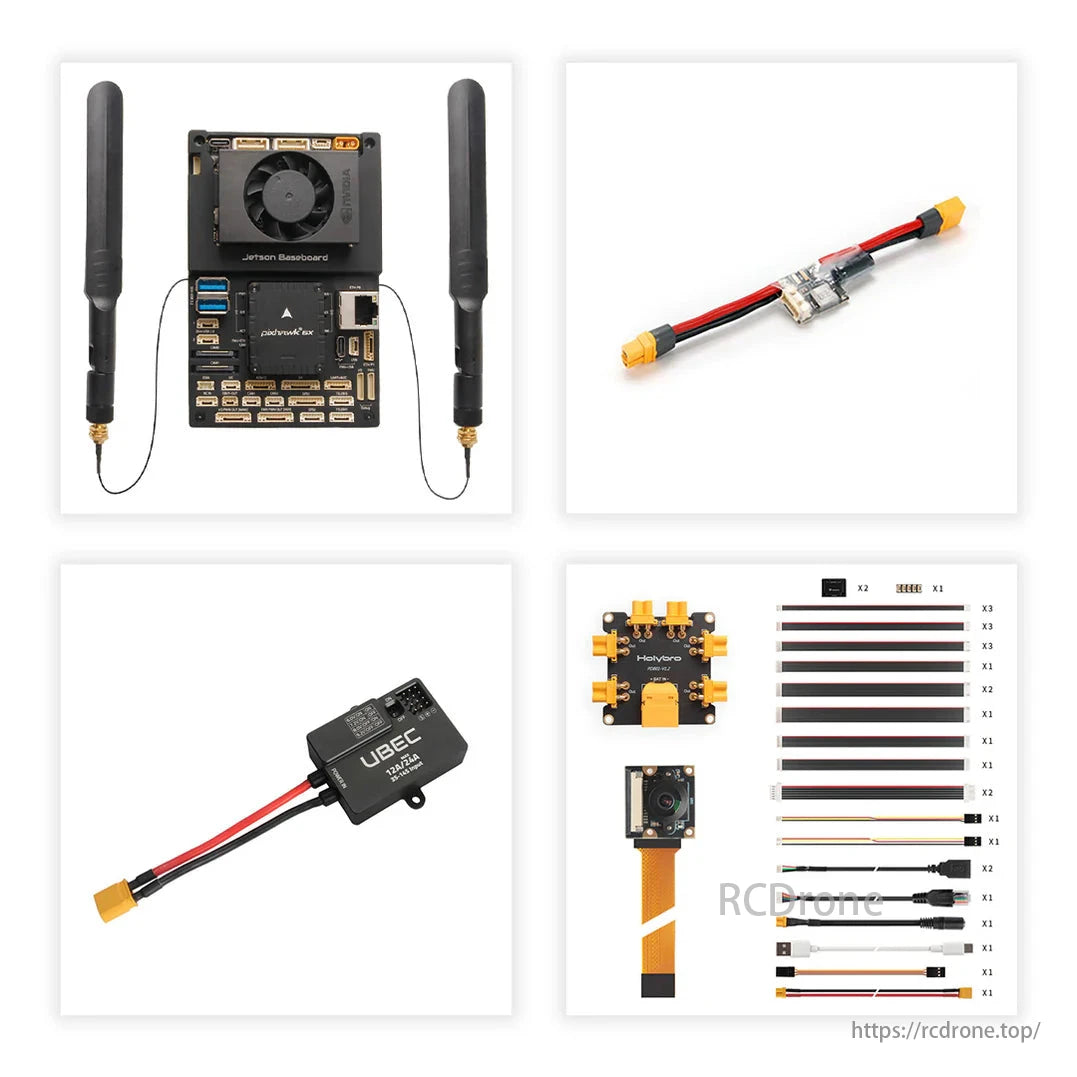
Pixhawk 6X Pro 套裝
-
Pixhawk 6X Pro 飛行控制器模組
-
Pixhawk Jetson Orin 底板(有或沒有外殼)
-
Nvidia Orin NX (16GB RAM) / Orin Nano (4GB RAM) 附散熱器和風扇
-
SSD、Wi-Fi/藍牙模組、相機、PM02D電源模組、UBEC 12A、PDB板、電纜組
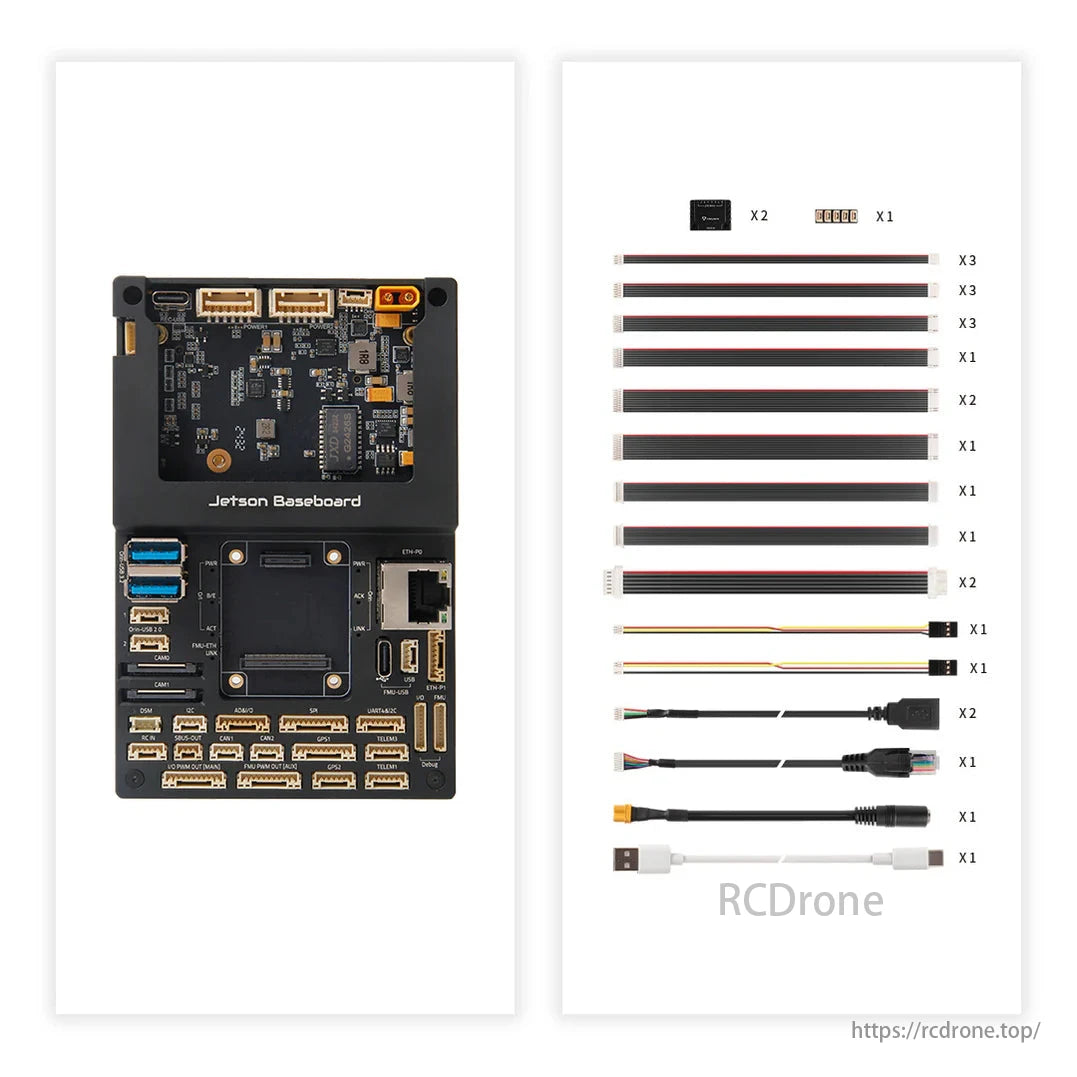
僅 Jetson 底板
-
Pixhawk Jetson Orin 底板(有或沒有外殼)
-
電纜組
參考連結
Jetson Orin 的預設登入憑證:
-
ID:
霍利布羅 -
密碼:
123
細節




Pixhawk 和 Nvidia Jetson 組合在單板上。

Nvidia jetson 透過 uart can 和乙太網路交換器連接,使用 rj45 連接器用於自動駕駛系統
Pixhawk 自動駕駛儀匯流排 (PAB) 開源規範

Jetson SoDIMM 連接器系統完全相容:Jetson Orin NX/Nano

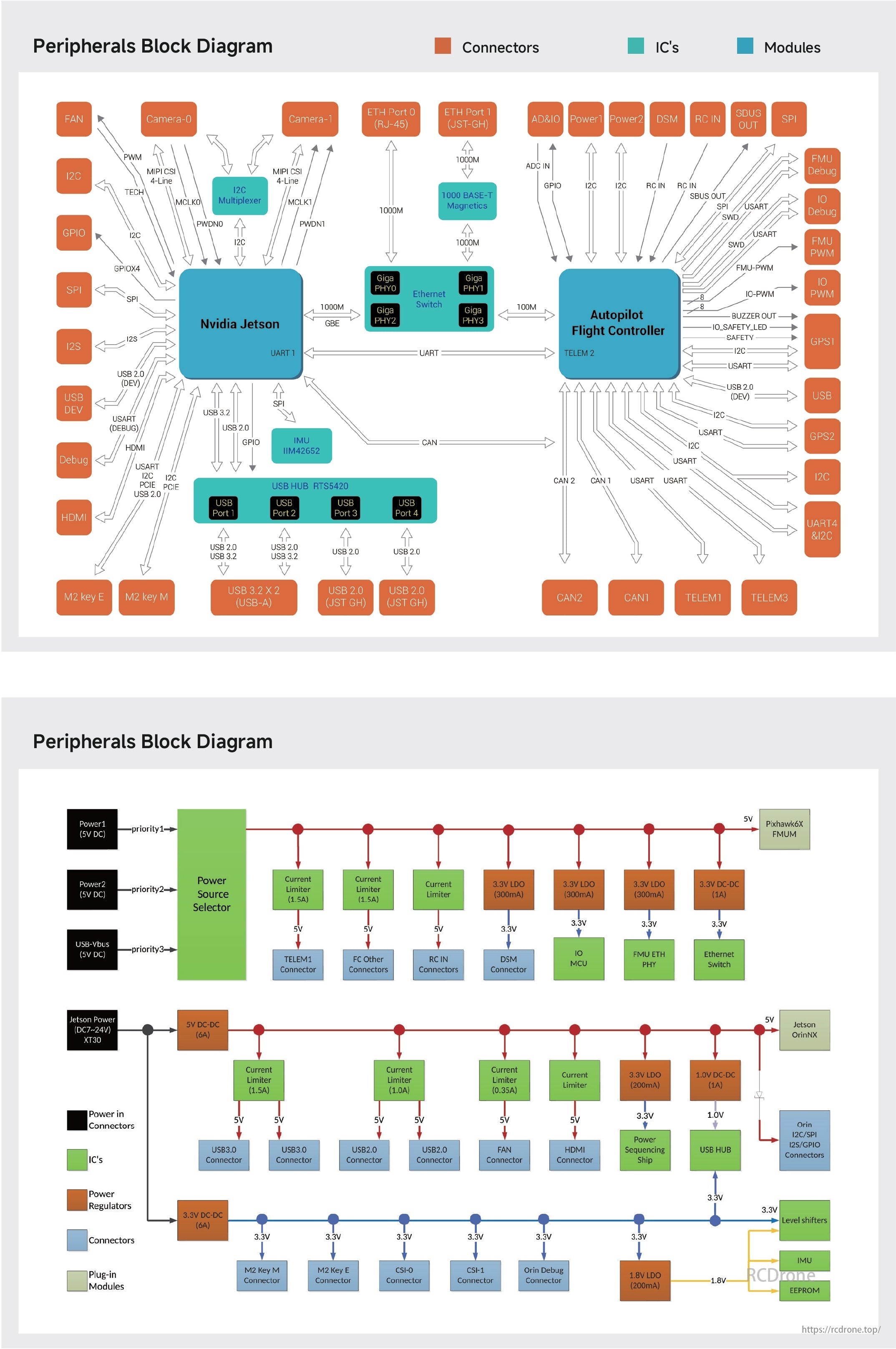
該圖描繪了嵌入式系統的外圍設備框圖,其中包括 Nvidia Jetson 和 Autopilot Flight Controller 等組件。它包括各種連接器、IC 和模組,例如 USB 連接埠、乙太網路交換器和電源調節器,說明了它們的互連和資料流。
參考接線圖

兩張圖展示了使用一顆電池的 Jetson 模組的配電系統。左圖使用 PM02D 電源模組和配電板,右圖包括用於大於 4S 電池的外部 UBEC。兩種設定都能確保 Jetson 和 Pixhawk Power 的電壓調節正確。
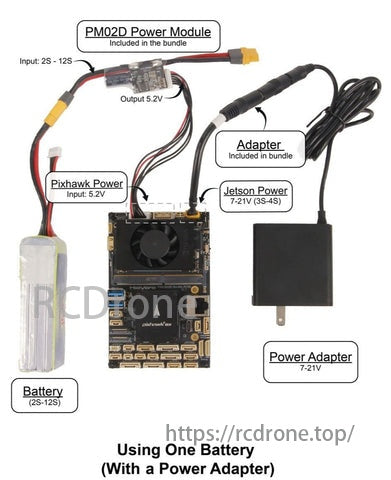
PM02D 電源模組將電池連接到 Pixhawk 和 Jetson,使用一顆電池和電源轉接器進行 7-21V 輸入。
Related Collections