Holybro Pixhawk 6X (ICM-45686) 飛控器-三重冗餘IMU,STM32H753,以太網,支援PX4及ArduPilot
Holybro Pixhawk 6X (ICM-45686) 飛控器-三重冗餘IMU,STM32H753,以太網,支援PX4及ArduPilot
HolyBro
無法載入取貨服務供應情況
概述
Holybro Pixhawk 6X (ICM-45686) 是一款高性能、模組化的自動駕駛飛行控制器,專為要求苛刻的工業和商業無人機應用而設計。它具有三重冗餘 ICM-45686 IMUs、雙氣壓計以及運行於480 MHz的 STM32H753 處理器,Pixhawk 6X 提供無與倫比的可靠性、實時性能和靈活性。其模組化架構、先進的振動隔離和以太網介面使其成為需要強大控制、精確度和任務適應性的無人機系統的理想選擇。
主要特點
-
三重IMU冗餘: 3x ICM-45686 IMU (±32g) 配備BalancedGyro™技術以實現容錯慣性導航
-
雙氣壓計: ICP20100和BMP388以增強高度準確性
-
高速處理器: STM32H753 Cortex-M7,480MHz,配備2MB Flash和1MB RAM
-
模組化設計: 分離FMU、IMU和基板,通過100針和50針Pixhawk®總線連接
-
溫控IMU板: 確保在不同溫度範圍內的最佳傳感器性能
-
以太網集成: 支持與任務計算機的高速通信
-
數字電源模組支持: 提供更準確的電壓和電流測量
先進隔離系統: 耐用的定制配方材料提供高頻譜振動阻尼
-
固件兼容性: 隨附PX4 (v1.14.3+),支持 ArduPilot (v4.5。0+)
規格
處理器與感測器
| 組件 | 詳細資訊 |
|---|---|
| FMU處理器 | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| IO處理器 | STM32F103, ARM Cortex-M3, 72MHz |
| IMU感測器 | 3x ICM-45686 (BalancedGyro™) |
| 氣壓計 | ICP20100 & BMP388 |
| 磁力計 | BMM150 |
| 安全元件 | NXP SE050 Plug & Trust |
電氣參數
| 參數 | Value |
|---|---|
| 最大輸入電壓 | 6V |
| USB電源輸入 | 4.75~5.25V |
| 伺服器軌道電壓 | 0~36V |
| Telem1 & GPS2 電流限制 | 1.5A 總和 |
| 其他端口電流限制 | 1.5A 總和 |
| PWM 信號電壓 | 默認 3.3V(可通過電阻切換至 5V) |
| 工作溫度 | -25°C 至 +85°C |
機械尺寸與重量
| 組件 | 尺寸 (mm) | 重量 (g) |
|---|---|---|
| 飛行控制器 | 38.8 x 31.8 x 16.8 | 31.3g |
| 標準底板 | 52.4 x 102 x 16.7 | 72.5g |
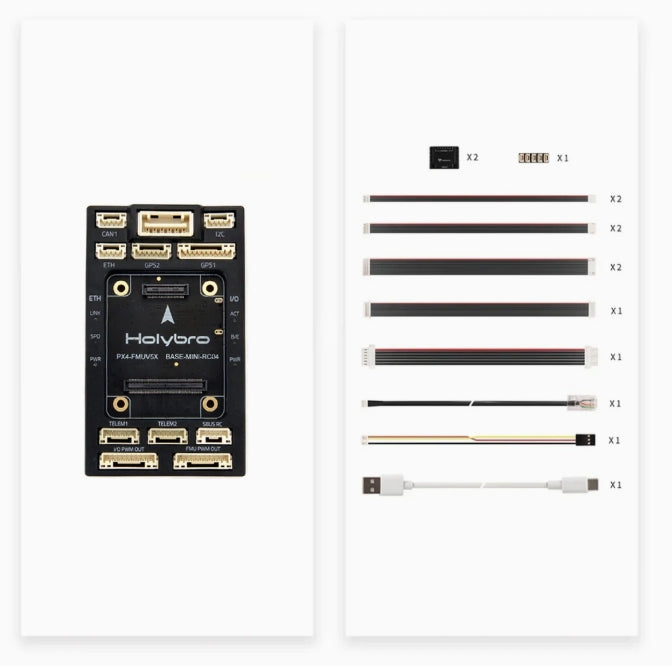
| 迷你底板 | 43.4 x 72.8 x 14.2 | 26.5克 |
韌體相容性
應用
理想的整合對象為:
-
工業無人機
-
商業無人機系統
-
垂直起降飛行器
-
學術研究平台
-
多感測器及高可靠性任務
詳細資訊

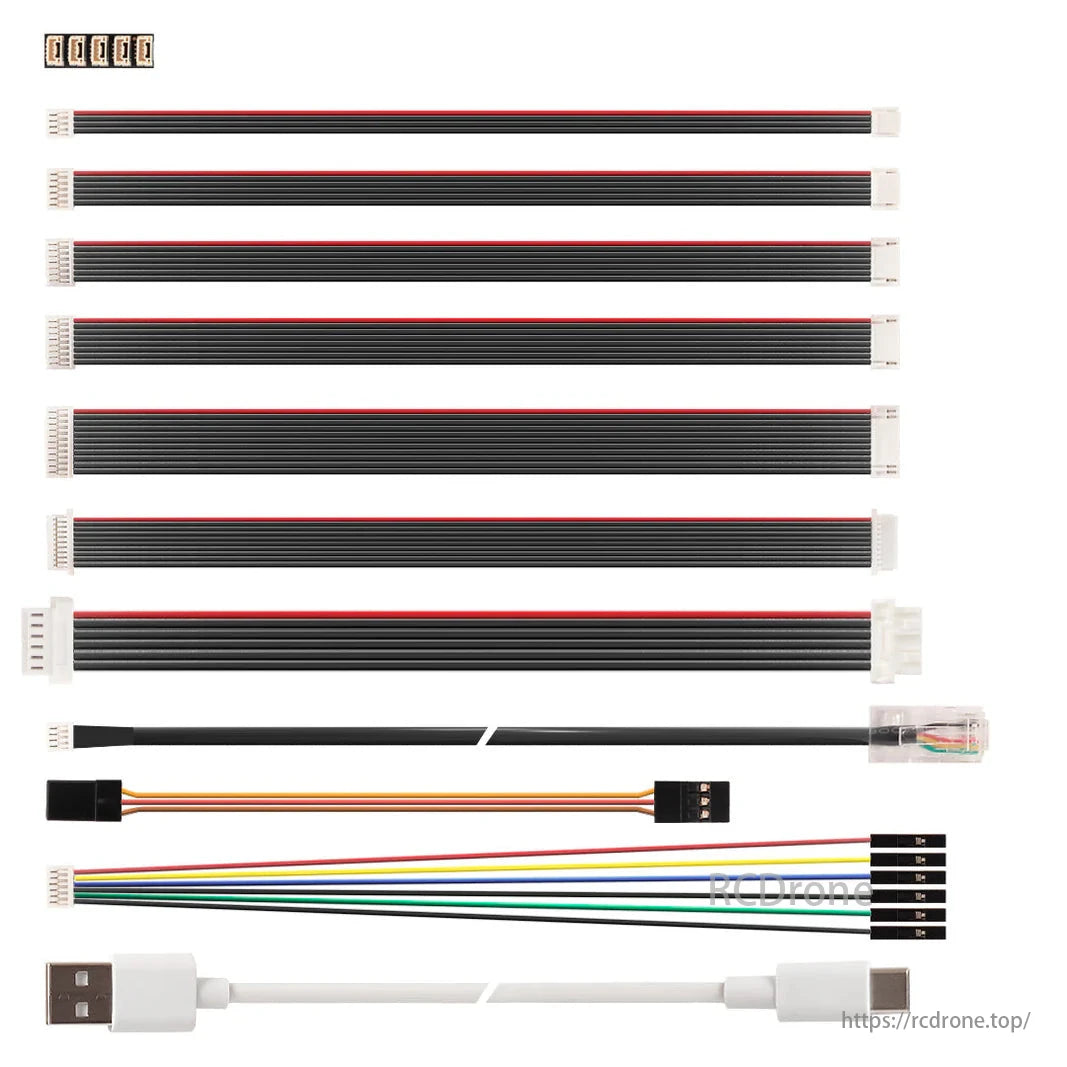
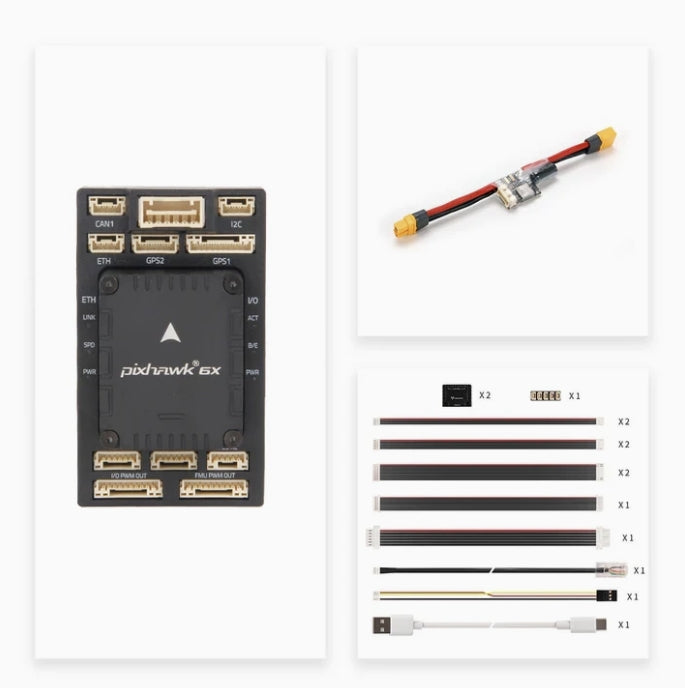
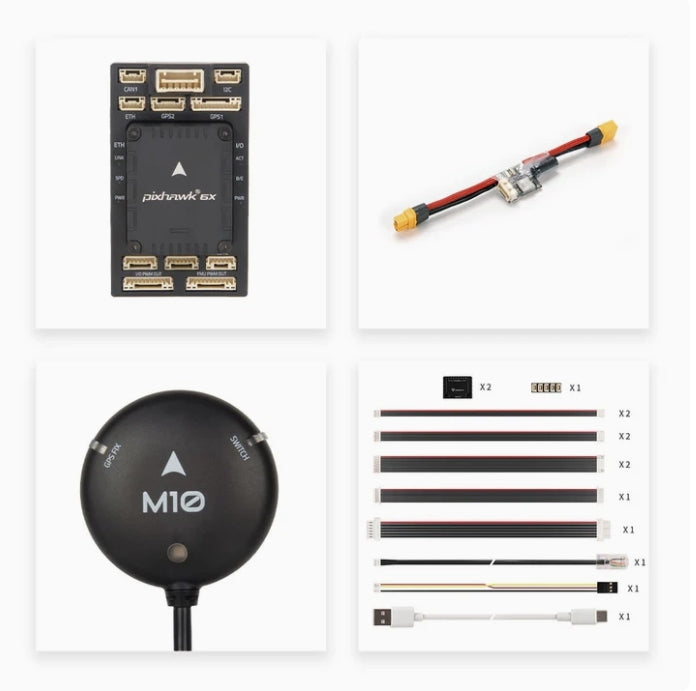
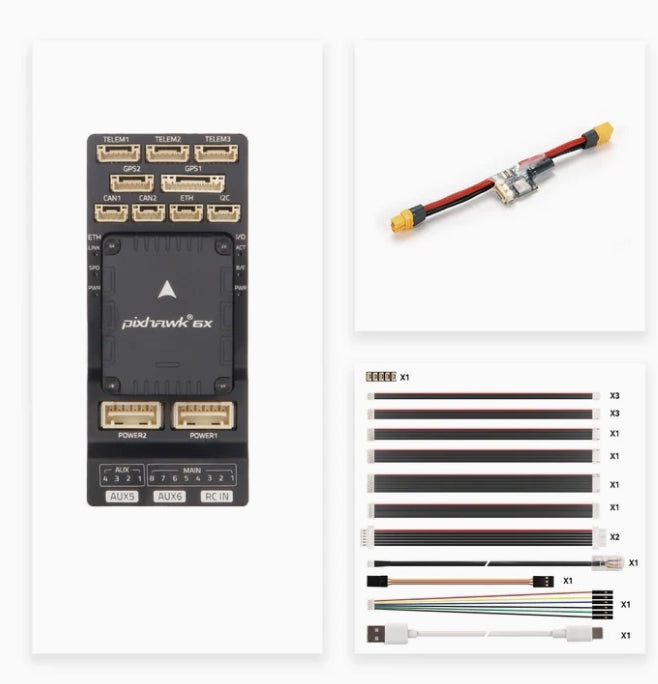
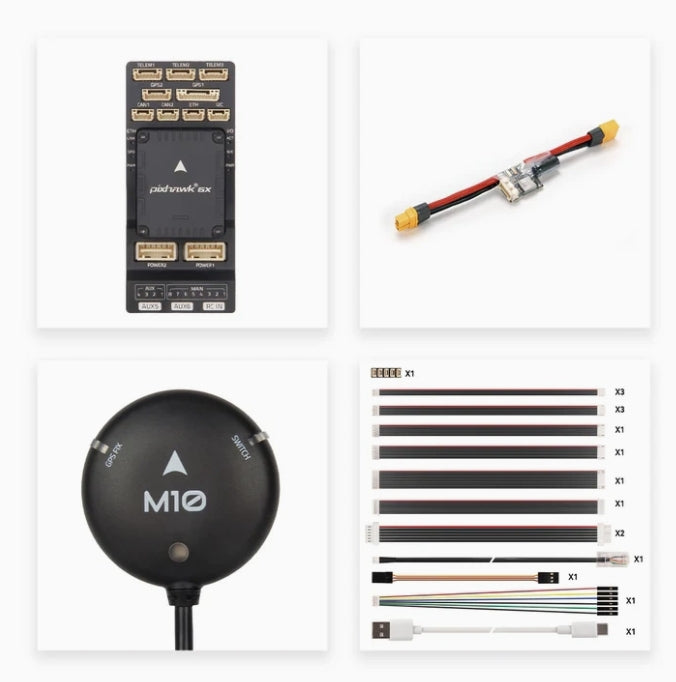
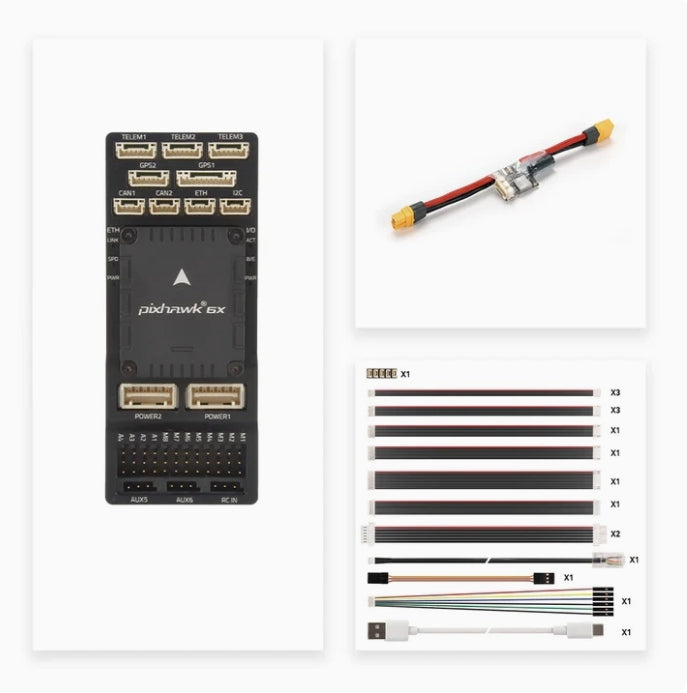
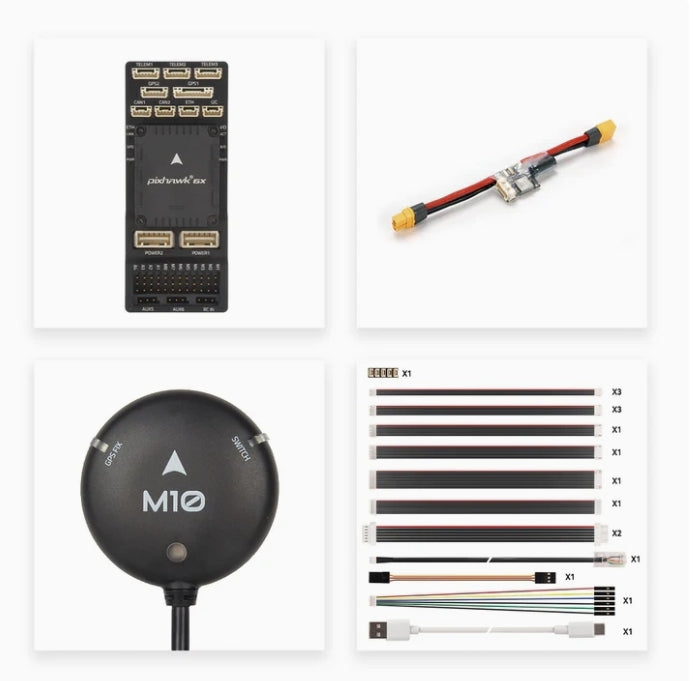
Pixhawk 6X 提供更纖薄的設計,並有兩種型號可供選擇。它具有改進的引腳接頭,以提供更好的連接性和性能,非常適合進階應用。選擇適合您需求的型號。
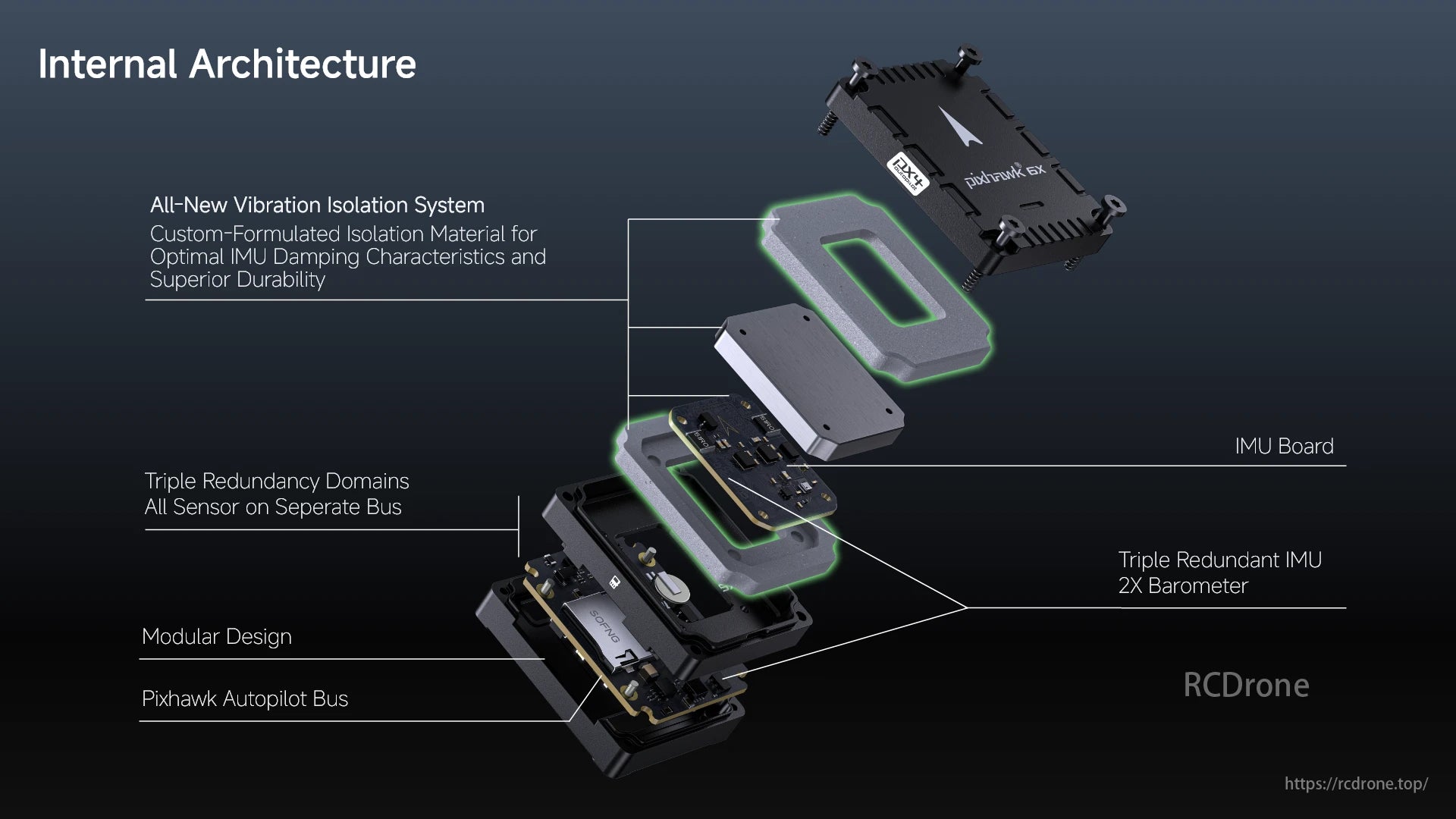
Holybro Pixhawk 6X 提供振動隔離、三重冗餘、模組化設計、自動駕駛總線、IMU 板和 2 倍氣壓計,以實現先進性能。
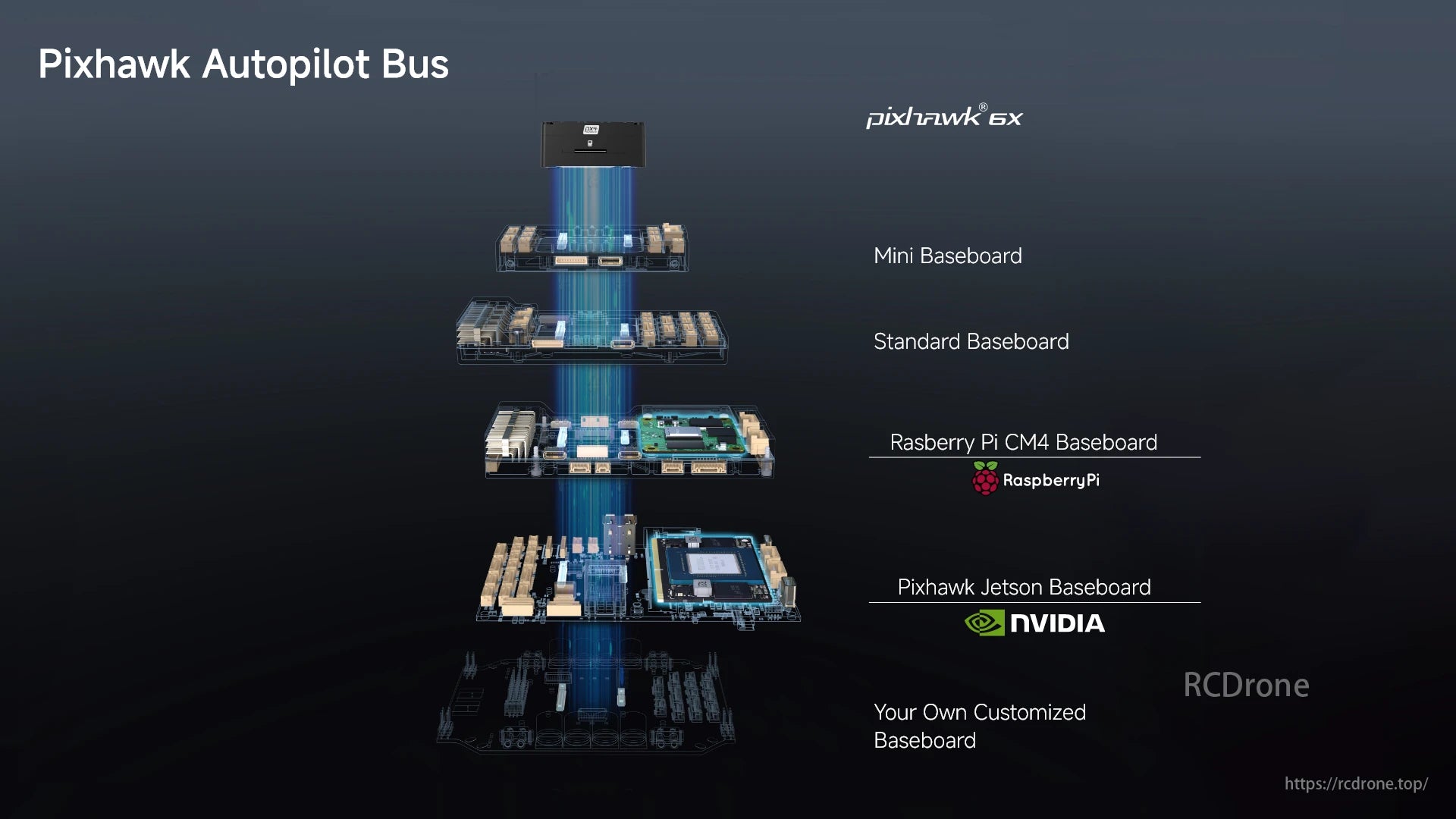
Pixhawk 自動駕駛總線包括 Pixhawk 6X、迷你基板、標準基板、Raspberry Pi CM4 基板、Jetson 基板和自定義選項。

溫度補償電阻、冗餘 IMU 和氣壓計、多樣的傳感器技術以及隔離材料確保準確性。

Pixhawk 自動駕駛總線、STM H753 32 位處理器(480 MHz)、Invensense ICM45686 IMU 具備平衡陀螺技術,以及 NXP EdgeLock SE050 安全元件集成於 FMU 板中。
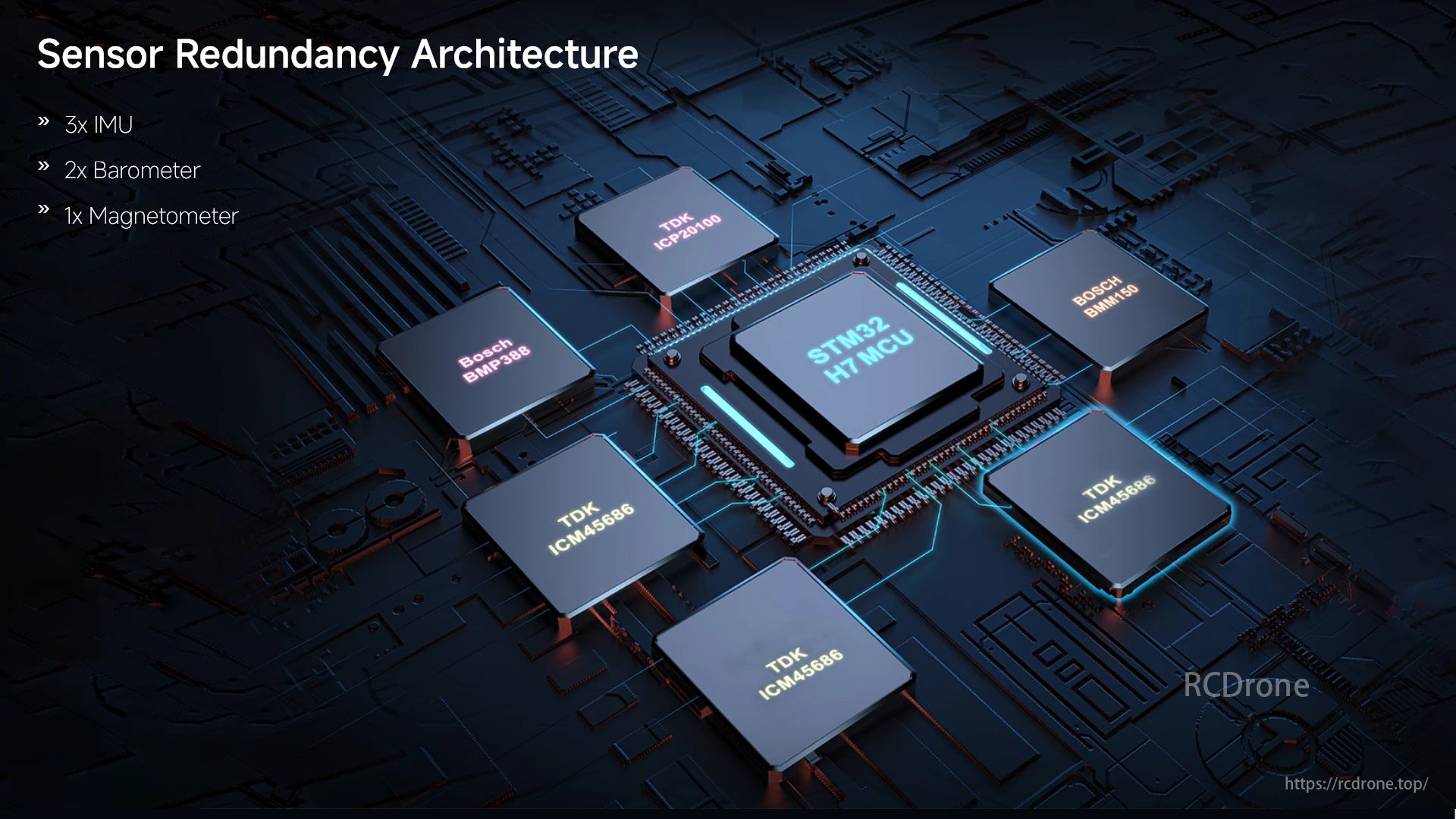
傳感器冗餘架構包含 3 倍 IMU、2 倍氣壓計和 1 倍磁力計。特徵包括 STM32 H7 MCU、TDK ICM-45686、Bosch BMP388 和 BMM50 感測器,以增強性能。
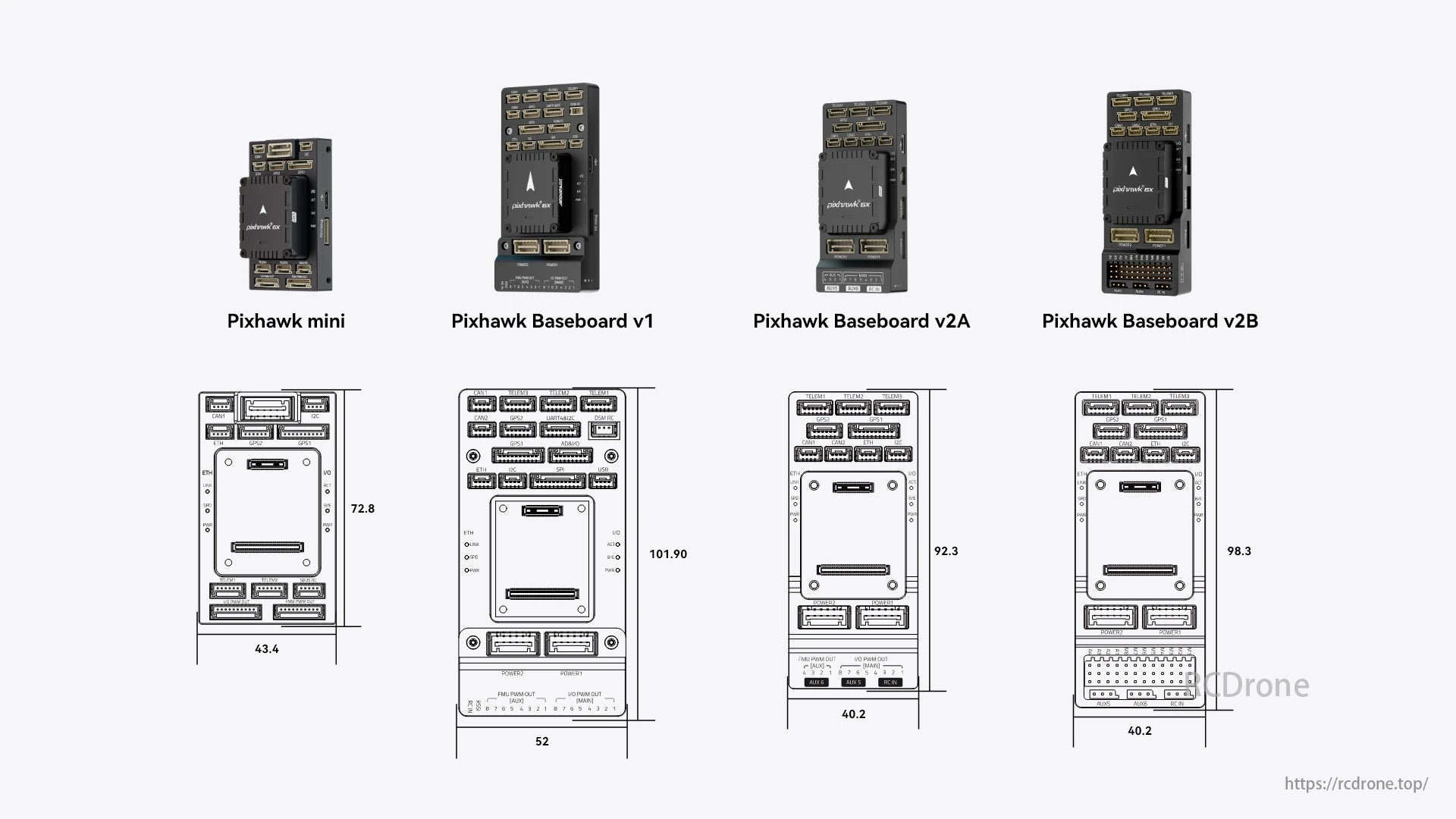
Pixhawk mini、Baseboard v1、v2A 和 v2B 飛行控制器,尺寸分別為:43.4x72.8、52x101.90、40.2x92.3 和 40.2x98.3。每個型號上都可見各種端口和連接器。
Related Collections