Holybro Pixhawk 4 自動駕駛儀飛行控制器
Holybro Pixhawk 4 自動駕駛儀飛行控制器
HolyBro
無法載入取貨服務供應情況
Pixhawk® 4 採用意法半導體® 的先進處理器技術、Bosch®、InvenSense® 的傳感器技術以及NuttX 實時操作系統,為控制任何自動駕駛車輛提供令人難以置信的性能、靈活性和可靠性。
Pixhawk 4 的微控制器具有 2MB 快閃記憶體和 512KB RAM。隨著功能和 RAM 資源的增加,開發人員可以提高開發工作的生產力和效率。更複雜的演算法和模型可以在自動駕駛儀上實現。
板載高性能、低噪音 IMU 專為穩定應用而設計。來自所有感測器的資料就緒訊號被路由到自動駕駛儀上單獨的中斷和定時器捕獲引腳,從而允許對感測器資料進行精確的時間戳。新設計的隔振裝置可實現更準確的讀數,使飛行器達到更好的整體飛行性能。
兩個外部 SPI 總線和六個相關的片選線允許添加額外的感測器和 SPI 介面的有效負載。共有 4 條 I2C 匯流排,其中 2 條專用於外部使用,另外 2 條與 GPS/羅盤模組的序列埠分組。
筆記:
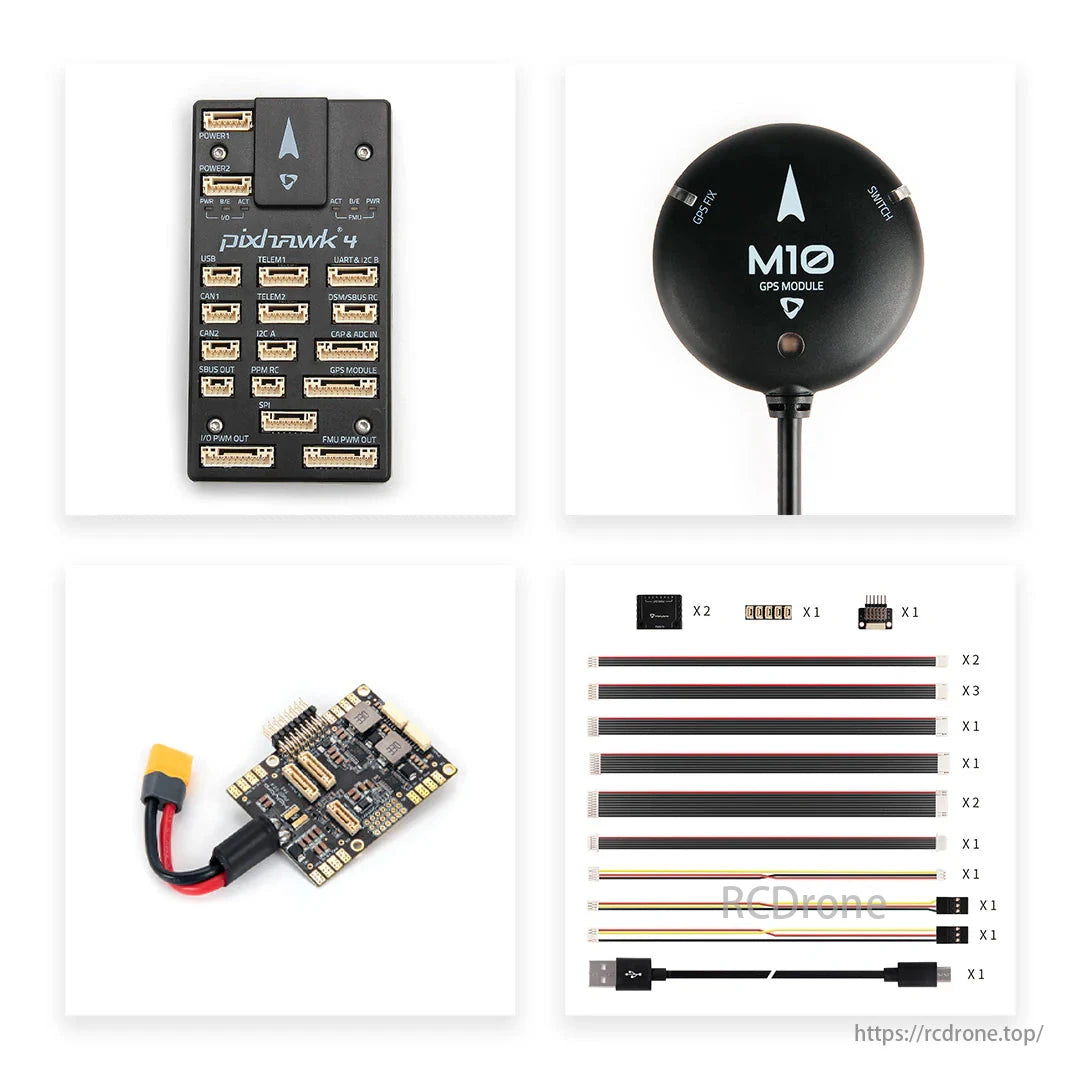
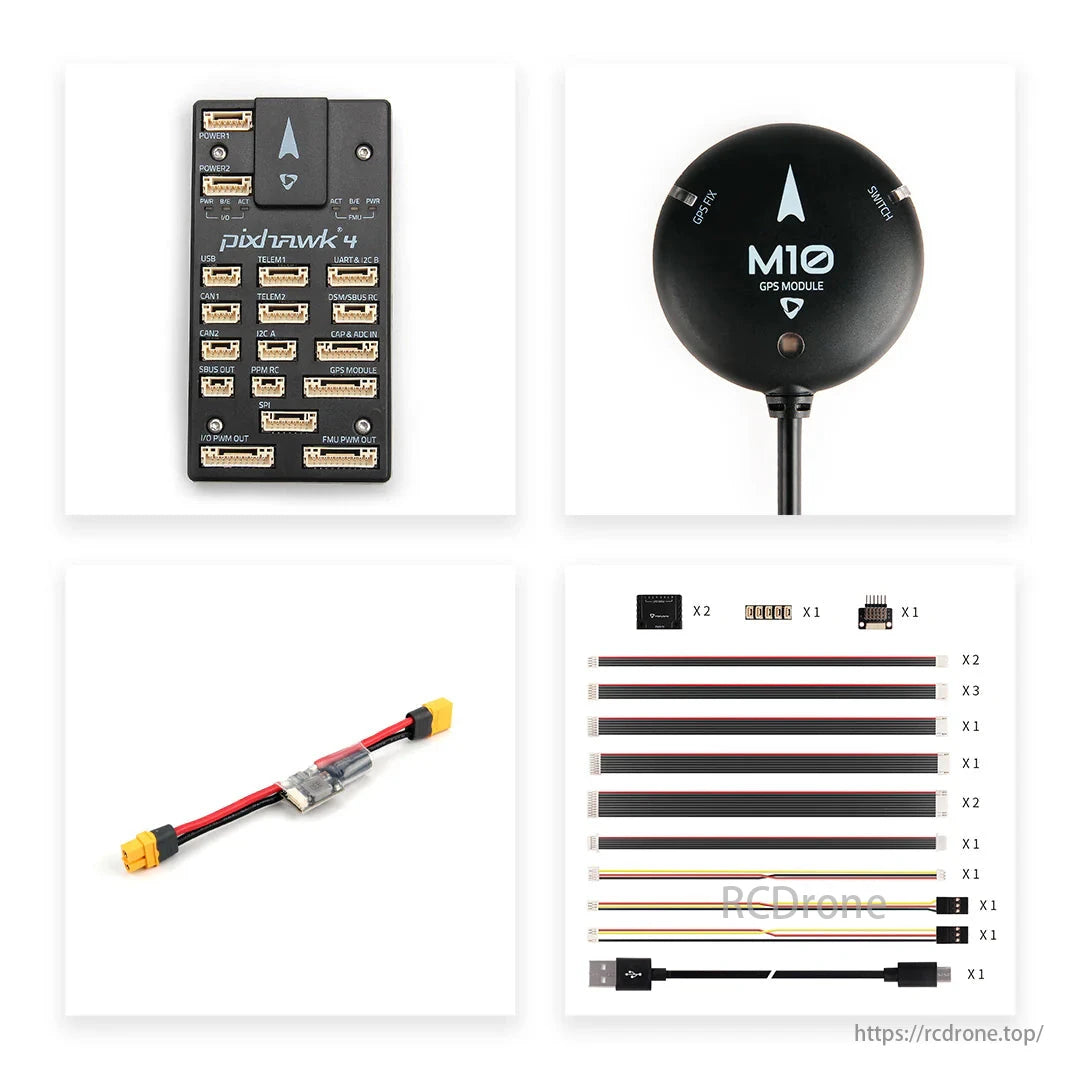
- M10 GPS 要求 PX4 1.14 和 ArduPilot 4.3 或更高版本。
- 電源模組比較圖
技術規格
- 主FMU處理器
- STM32F765 - 32 位元 Arm® Cortex® -M7、216MHz、2MB 記憶體、512KB RAM
- STM32F765 - 32 位元 Arm® Cortex® -M7、216MHz、2MB 記憶體、512KB RAM
- IO處理器
- STM32F103 - 32 位元 Arm® Cortex®-M3、72MHz、64KB SRAM(目前)
- STM32F100 - 32 位 Arm ® Cortex® -M3、24MHz、8KB SRAM(已停產)
- 板載感測器
- 加速/陀螺儀:ICM-20689
- 加速/陀螺儀:BMI055/ICM-20602
- 雜誌:IST8310
- 晴雨表:MS5611
- 加速/陀螺儀:ICM-20689
電氣數據
- 電源模組輸出:4.9~5.5V
- 最大輸入電壓:6V
- 最大電流檢測:120A
- USB電源輸入:4.75~5.25V
- 伺服軌輸入:0~36V
- 工作溫度:-25-85°C
機械數據
- 尺寸:44x84x12mm
- 重量(塑膠盒):33。3克
- 重量(鋁殼):49g
下載次數:
貨號 11032/11035 包括:
- Pixhawk 4 飛行控制器(塑膠或鋁)
- 電纜組
貨號 20045/20046/20114/20115 包括:
- Pixhawk 4 飛行控制器(塑膠或 鋁)
- 電源模組: PM02 V3 12S/PM07 14S
- 電纜組
SKU 20139/20140/20141/20142/20269/20270/20271/20272 包括:
- Pixhawk 4 飛行控制器
- 電源模組: PM02 V3 12S/PM07 14S
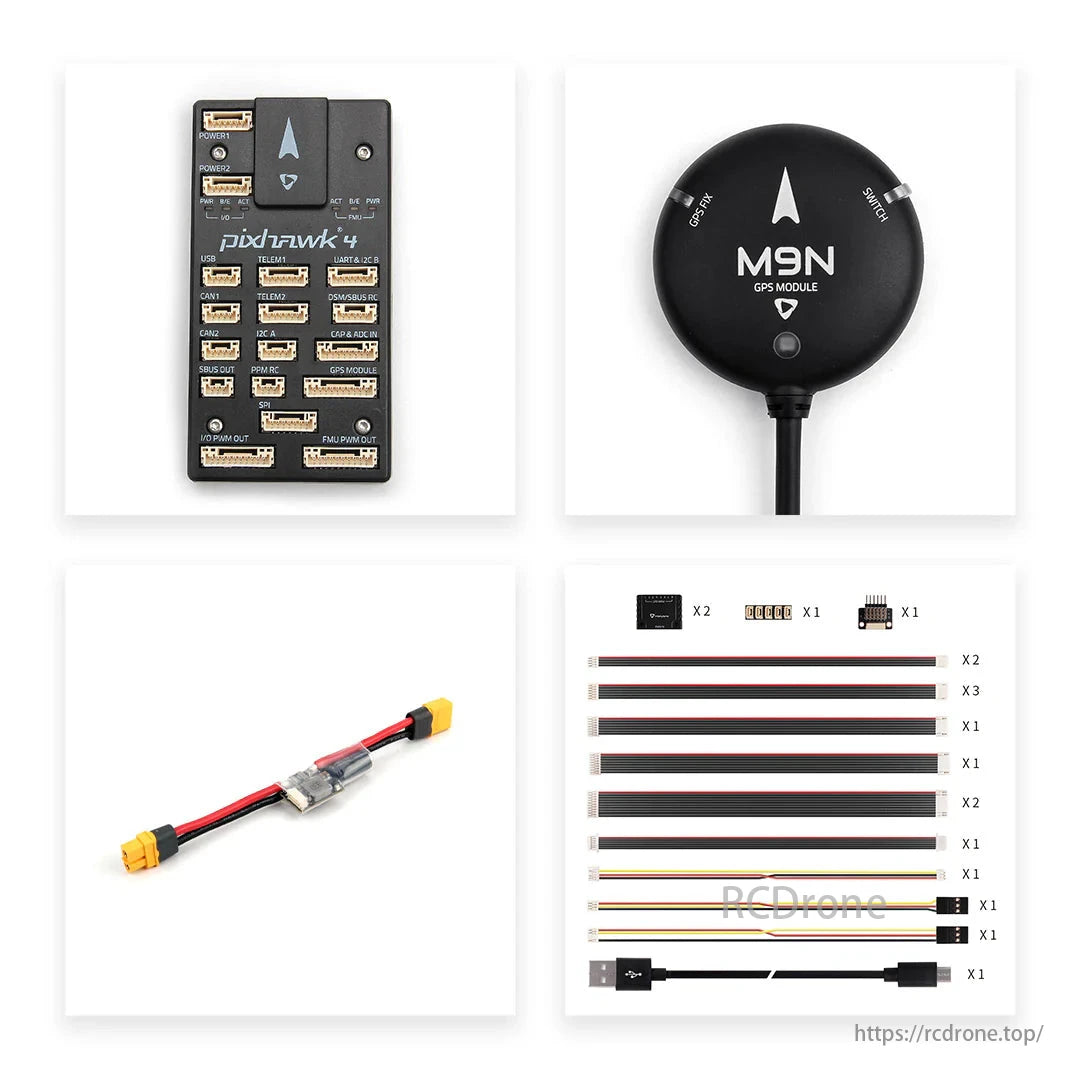
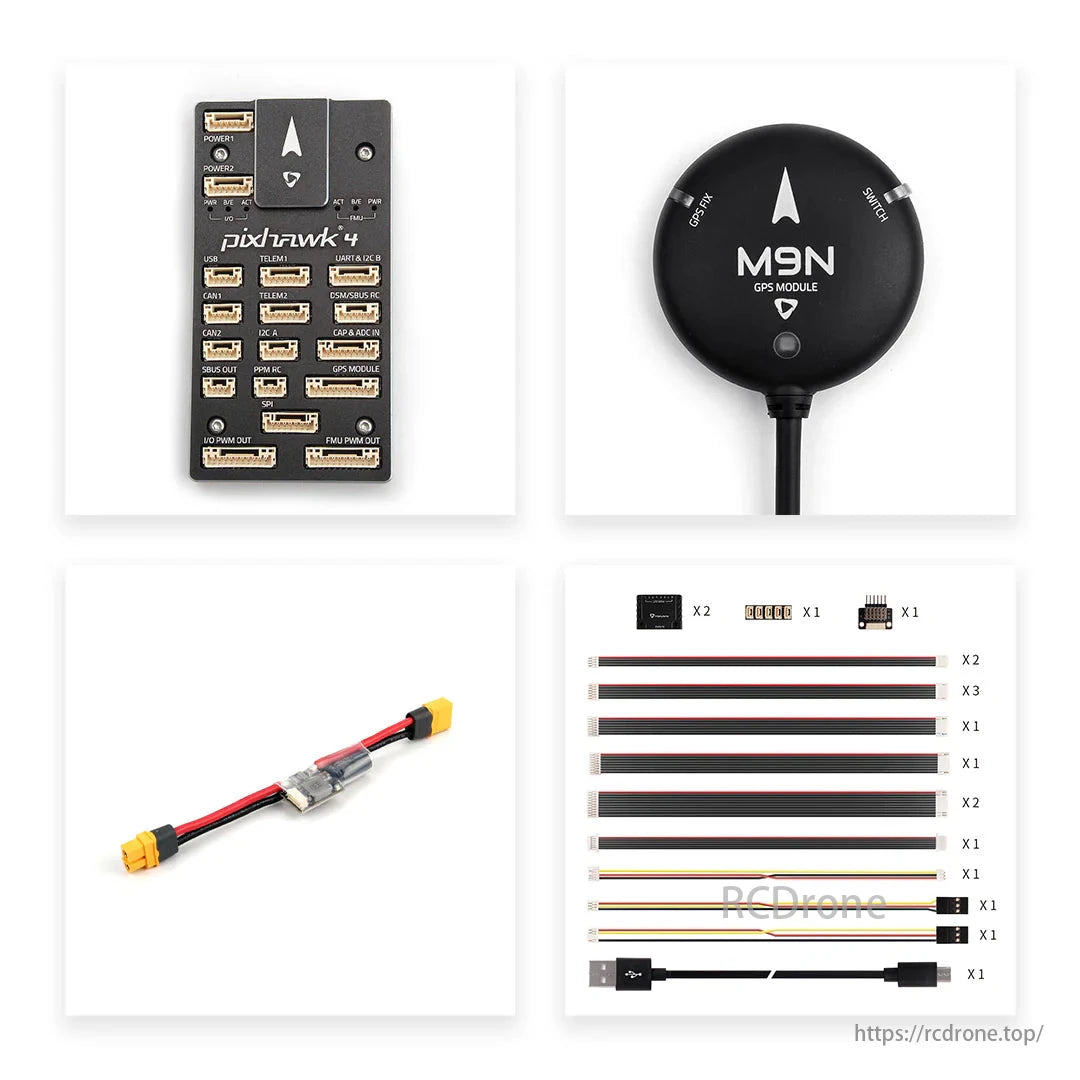
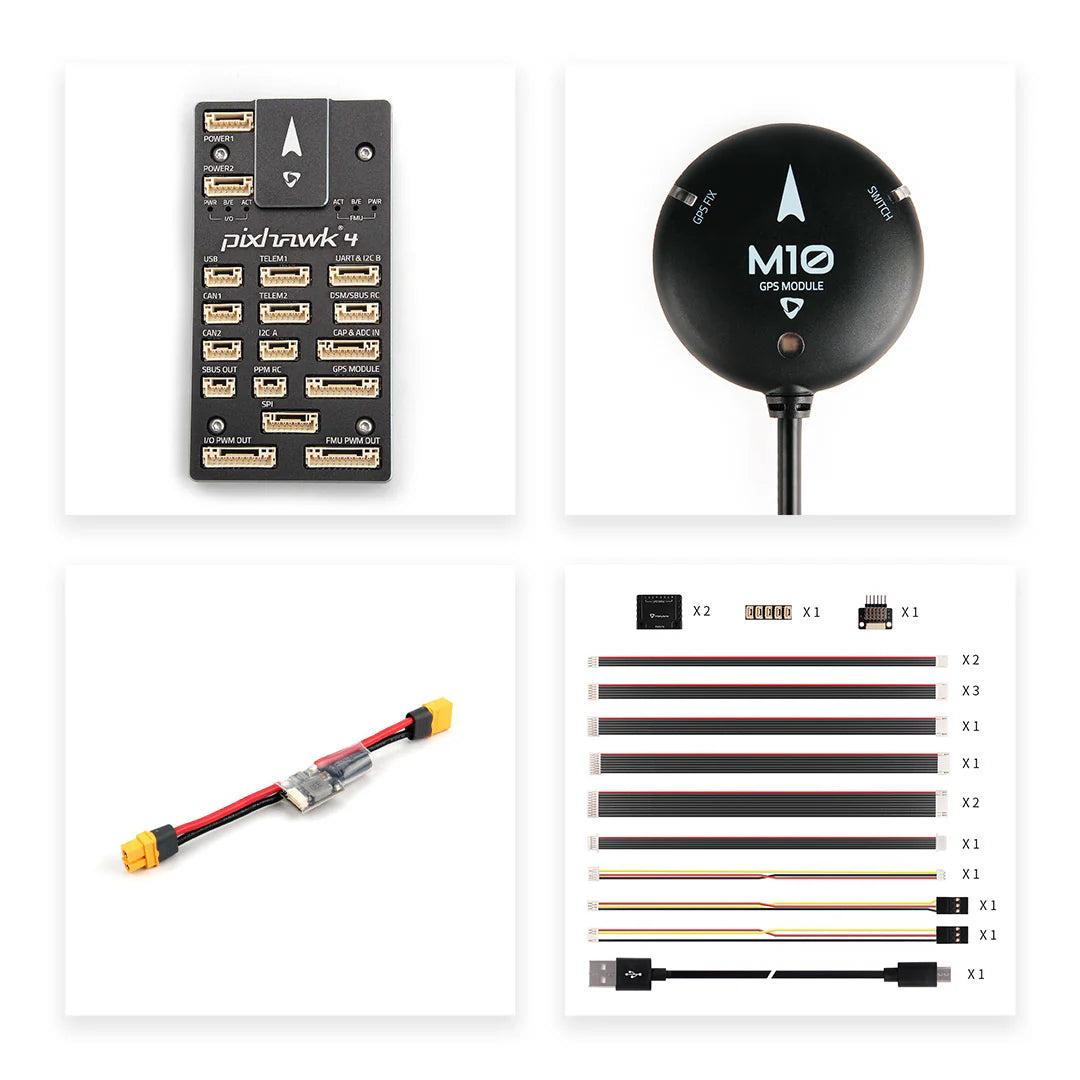
- 全球定位系統: M9N/M10
- 電纜組

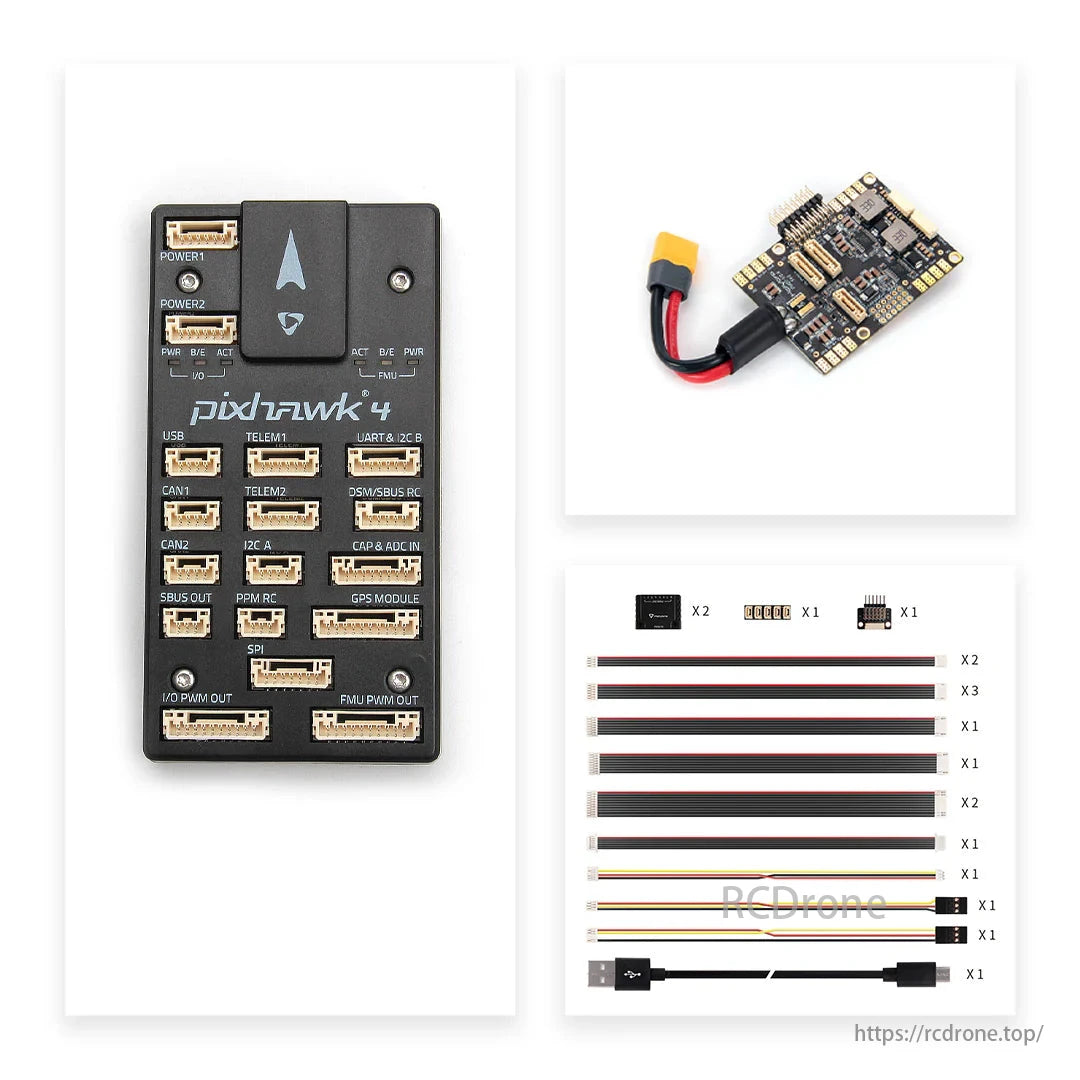
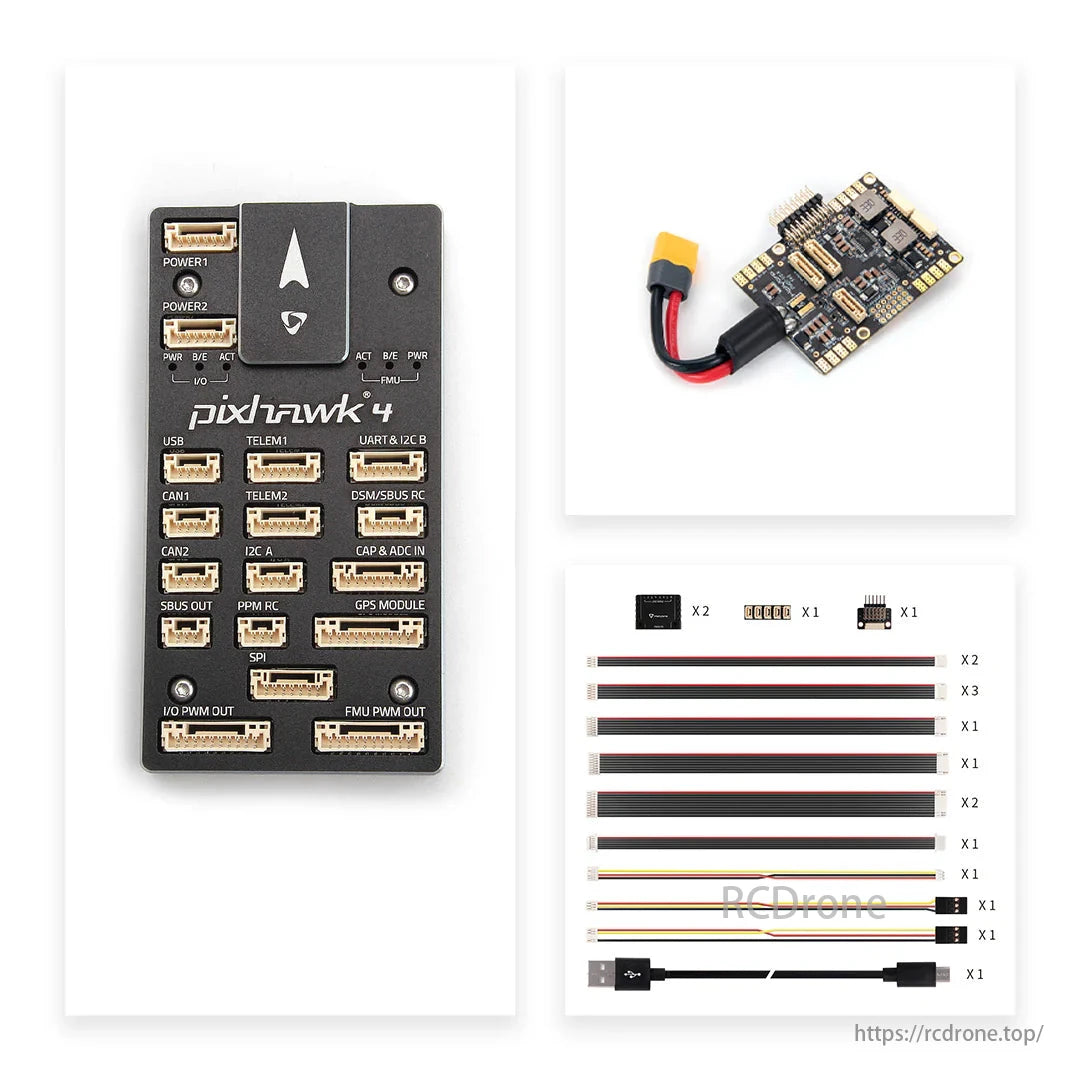
Pixhawk 4 飛行控制器具有各種端口,包括 USB、CAN、TELEM、UART、I2C、SBUS OUT、PPM RC、SPI 和 GPS 模組。

Pixhawk 飛行控制器,由 PX4 自動駕駛系統提供動力。

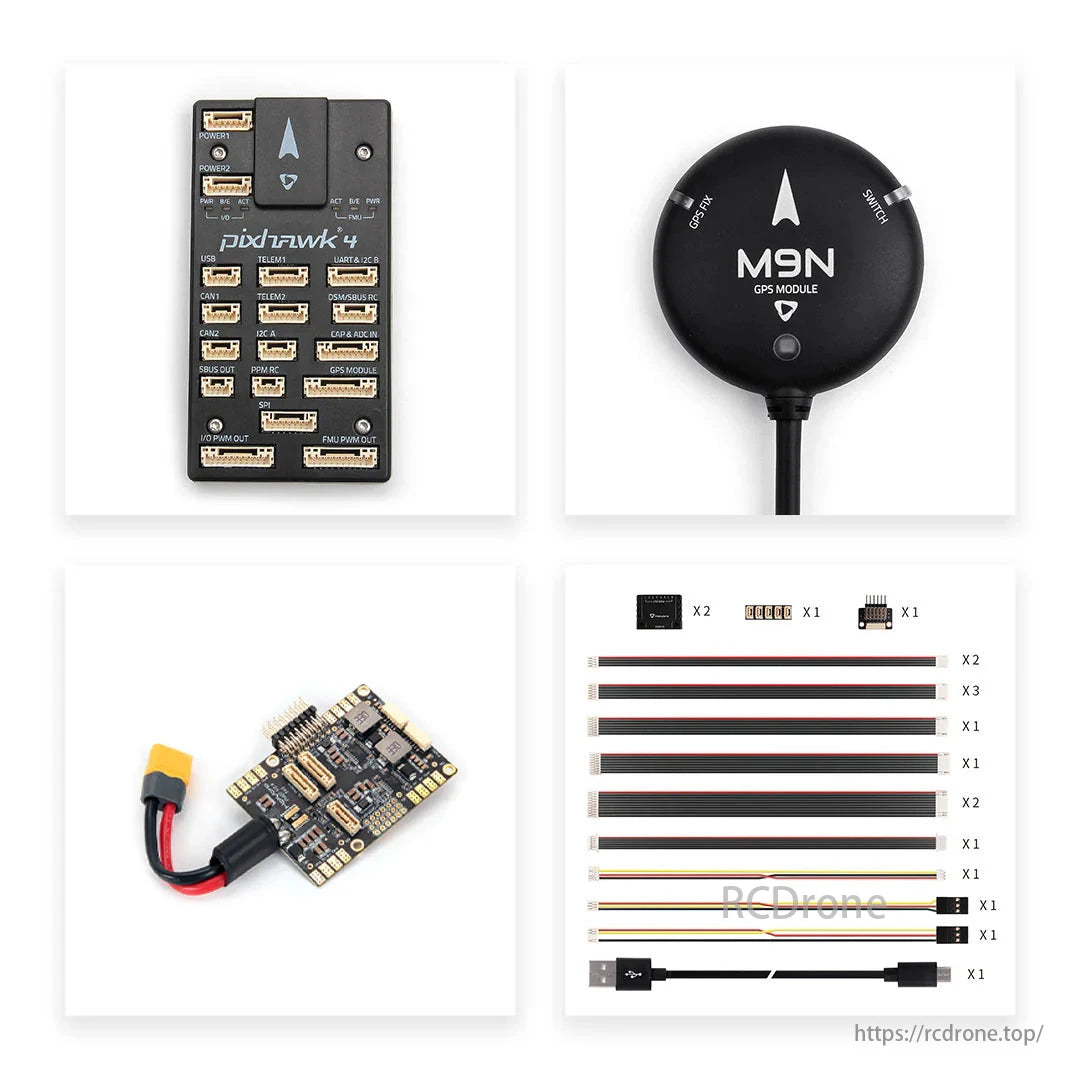
Pixhawk 4 飛行控制器、M9N GPS 模組、帶 XT60 連接器的電源模組以及用於遙控無人機組裝的各種電纜。

Pixhawk 4 飛行控制器具有各種端口,包括 USB、CAN 和 GPS 模組。包括一個電源模組和多條連接電纜。

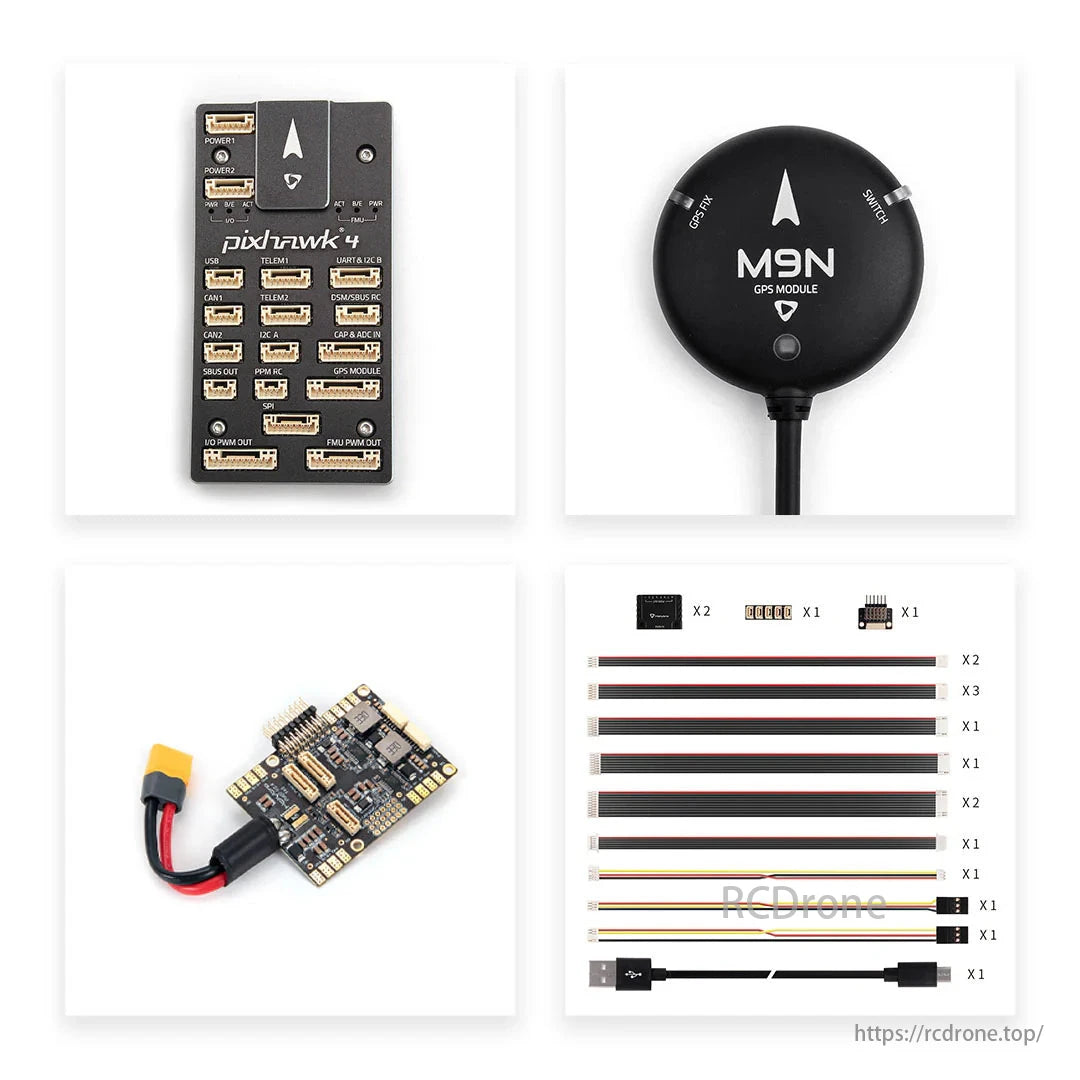
Pixhawk 4 飛行控制器、M9N GPS 模組、帶 XT60 連接器的電源模組以及各種連接電纜。
Related Collections