Holybro Pixhawk 6X Pro 自動駕駛飛行控制器
Holybro Pixhawk 6X Pro 自動駕駛飛行控制器
HolyBro
定價
$709.00 USD
定價
售價
$709.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
設計重點
- 高性能 ADIS16470 工業 IMU,具有高加速度計動態範圍 (±40 g),非常適合 在要求苛刻的無人機應用中進行精確的運動感測
- 全新先進耐用隔振材料,具有更高頻譜的共振頻率,非常適合工業和商業無人機應用
- 獨立總線上的三冗餘 IMU 和雙冗餘氣壓計
- 高效能STM32H753處理器
- 模組化飛控:獨立的IMU、FMU和Base系統
- 安全驅動的設計融合了來自不同製造商和型號系列的感測器
- 獨立 LDO 透過獨立電源控制為每個感測器供電。
- 用於高速任務電腦整合的乙太網路介面。 在目標設備上使用 50 歐姆終端電阻可以實現無變壓器 (AN2190 50 歐姆端接)。
- 溫控IMU板,使IMU達到最佳工作溫度
- 硬體可切換3.3V或5V訊號模式(需修改底板)
筆記:
- 本產品運作需要 FC 模組 + 基板。 FC 模組或基板本身無法運作。
規格
處理器和感測器
- FMU處理器:STM32H753
- 32 位元 Arm® Cortex®-M7,480MHz,2MB 快閃記憶體,1MB RAM
- IO處理器:STM32F103
- 32 位元 Arm® Cortex®-M3,72MHz,64KB SRAM
- 板載感測器
- 加速/陀螺儀:ADIS16470
- ±40克, 隔振工業 IMU
- 加速/陀螺儀:IIM-42652
- ±16克, 隔振工業 IMU
- 加速/陀螺儀:採用 BalancedGyro™ 技術的 ICM-45686
- ±32g,硬安裝
- 晴雨表:ICP20100
- 晴雨表:BMP388
- 彈匣:BMM150
- 加速/陀螺儀:ADIS16470
- 恩智浦 EdgeLock SE050 Plug & Trust 硬體安全元件
電氣數據
- 額定電壓:
- 最大輸入電壓:6V
- USB電源輸入:4.75~5.25V
- 伺服軌輸入:0~36V
- 目前評級:
- Telem1輸出限流器:1.5A
- 所有其他連接埠組合輸出限流:1.5A
- 工作溫度:-25-85°C
機械數據
- 方面
- 飛控模組:38.8 x 31.8 x 30.1mm
- 標準底板:52.4 x 102 x 16.7mm (鋁)
- 迷你底板:43.4 x 72.8 x 14.2 毫米
- 重量
- 飛控模組:50g
- 標準底板:72.5g (鋁)
- 迷你底板:26。5克
套餐內容
FC 模組僅包含:
- 皮克斯霍克 6X Pro飛控模組
- 選購的 IMU 阻尼更換(比預先安裝的更軟)
標準V2A/V2B/迷你套裝包含:
- Pixhawk 6X Pro 飛行控制器模組
- Pixhawk 標準底板 v2A/ Pixhawk 標準底板 v2B/ 迷你底板
- PM02D 高壓電源模組
- 電纜組
細節
全新隔振設計
這種新的隔振設計採用交流客製化的耐用矽基隔離材料取代了傳統的泡沫設計。乙經過廣泛的研發和測試,它提供了最佳的IMU阻尼特性,共振頻率在更高的頻譜,非常適合工業和商業無人機
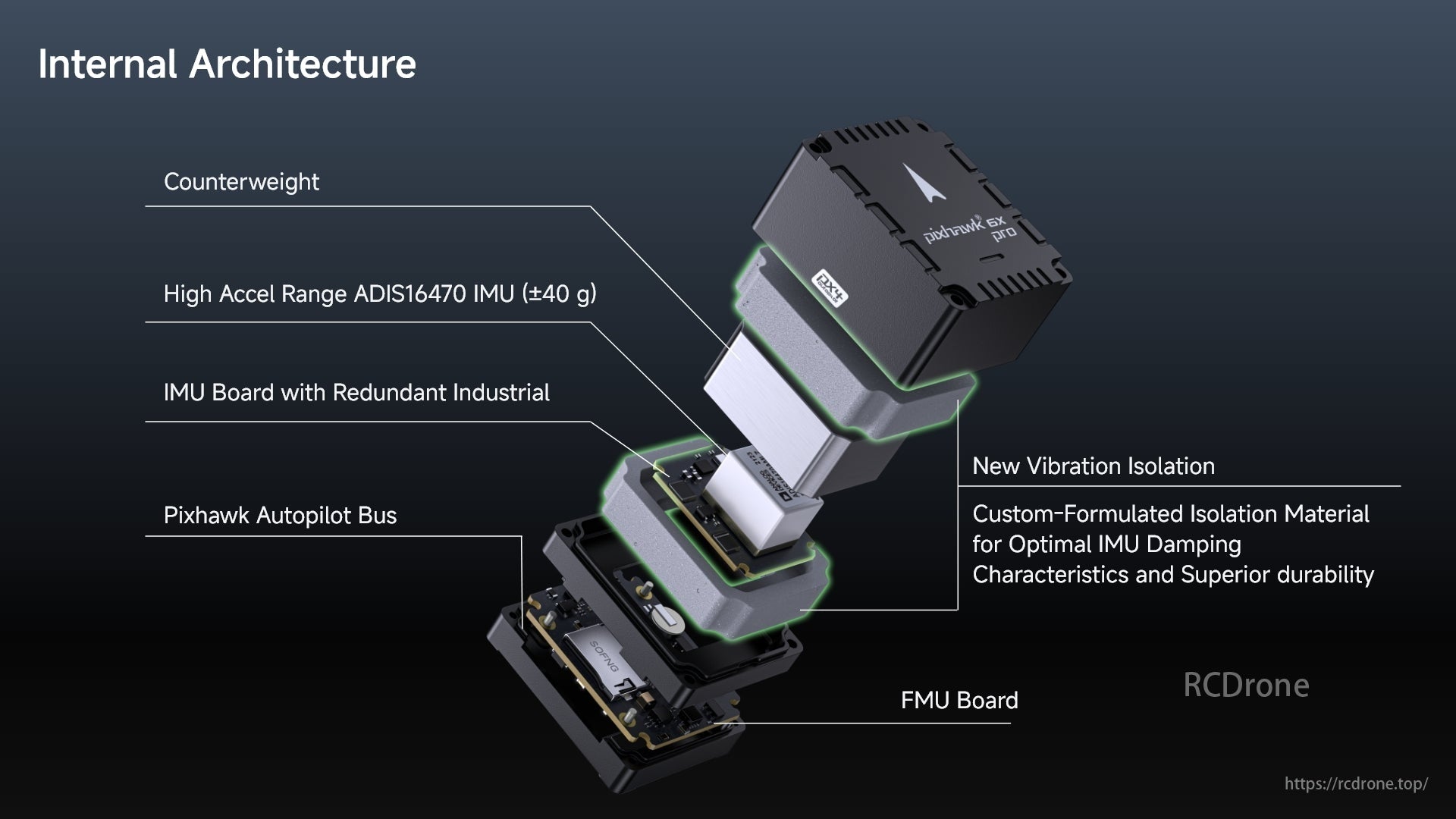
內部架構:配重、高加速範圍 ADIS16470 IMU (±40 g)、冗餘工業 IMU 板、Pixhawk 自動駕駛儀匯流排、新型隔振、FMU 板。
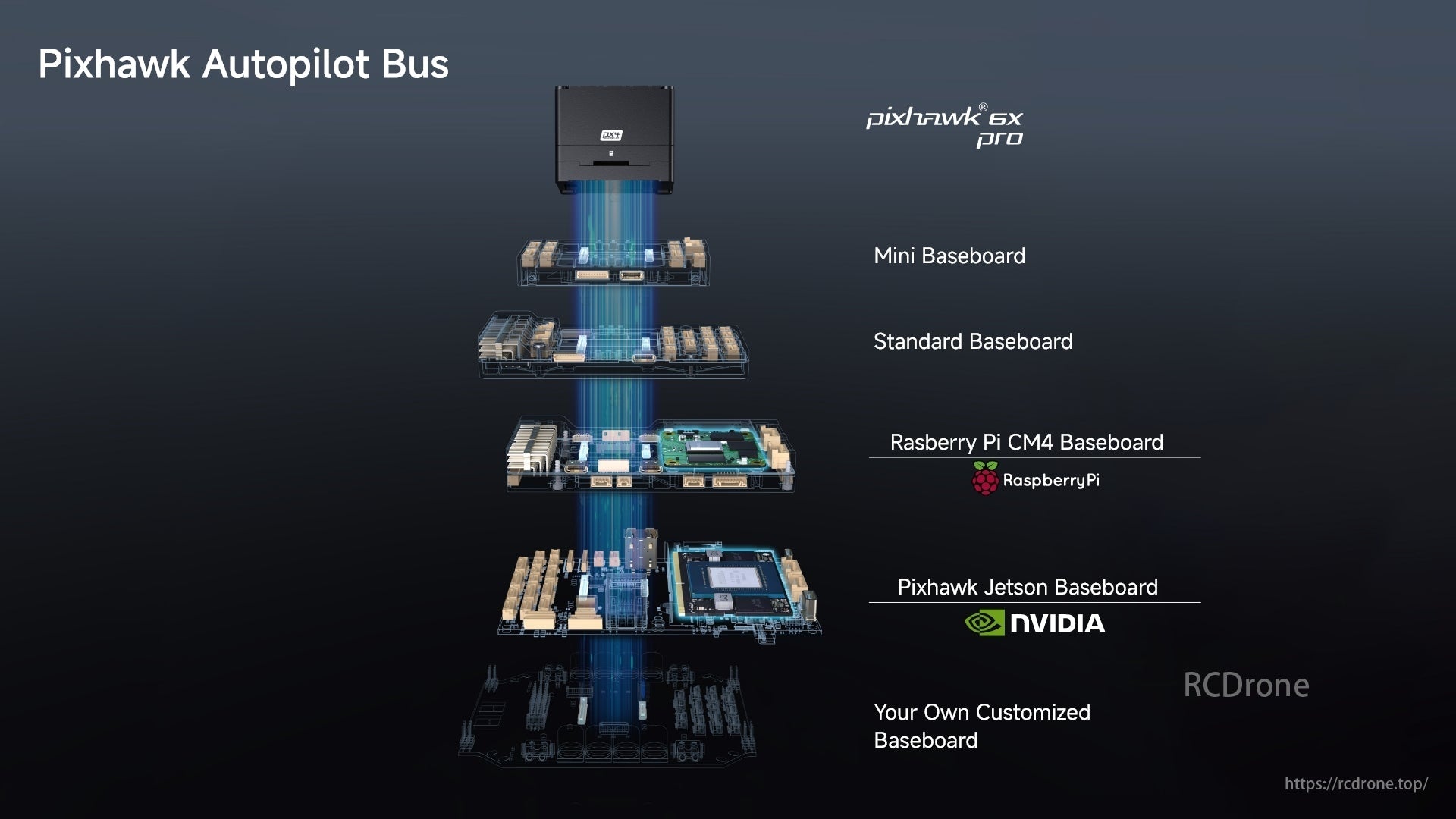
Pixhawk Autopilot 匯流排連接 Mini、Standard、Raspberry Pi CM4、Jetson 底板和自訂底板。
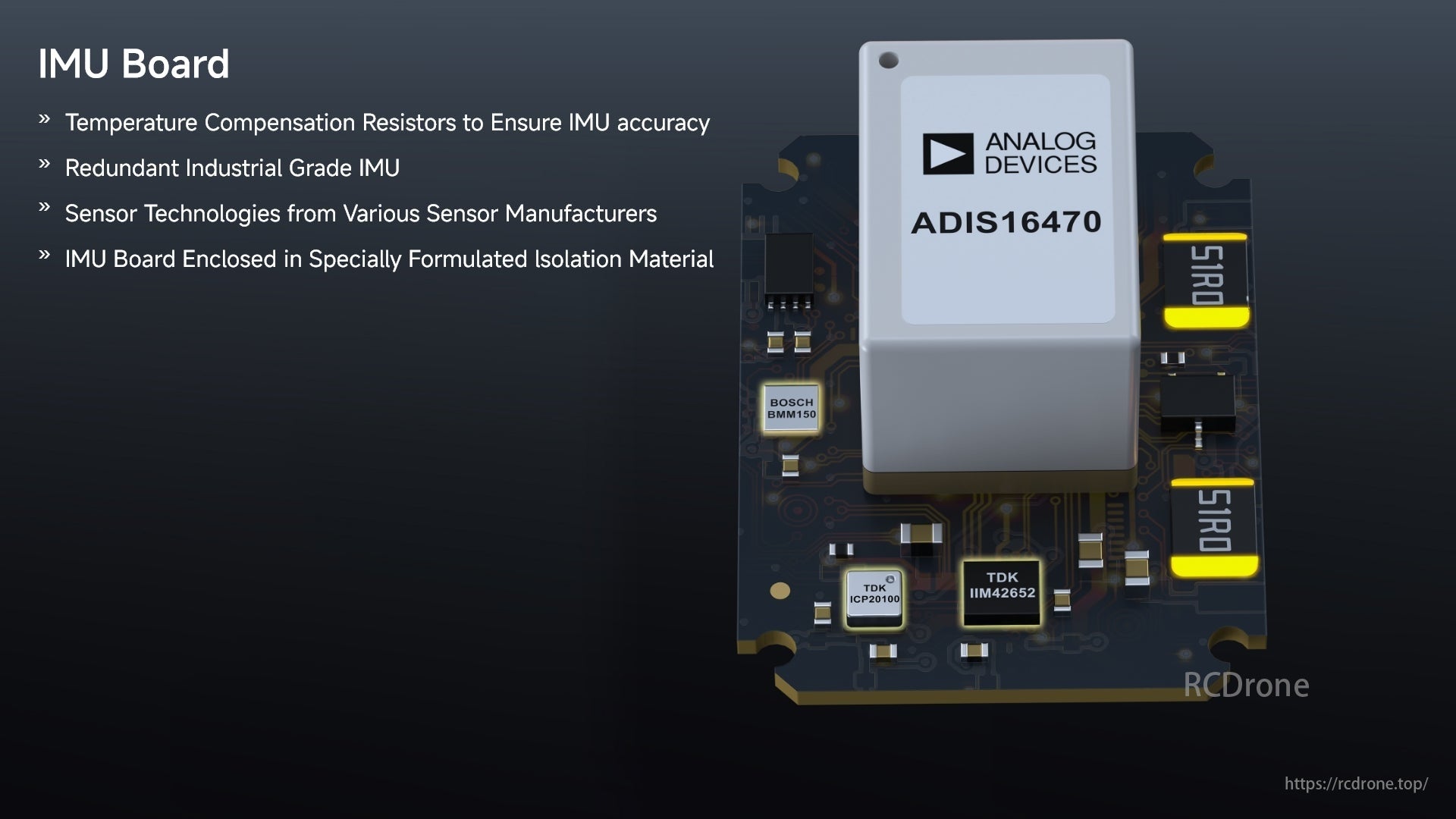
IMU 板具有溫度補償電阻、冗餘工業級 IMU、來自不同製造商的感測器,並封裝在隔離材料中。
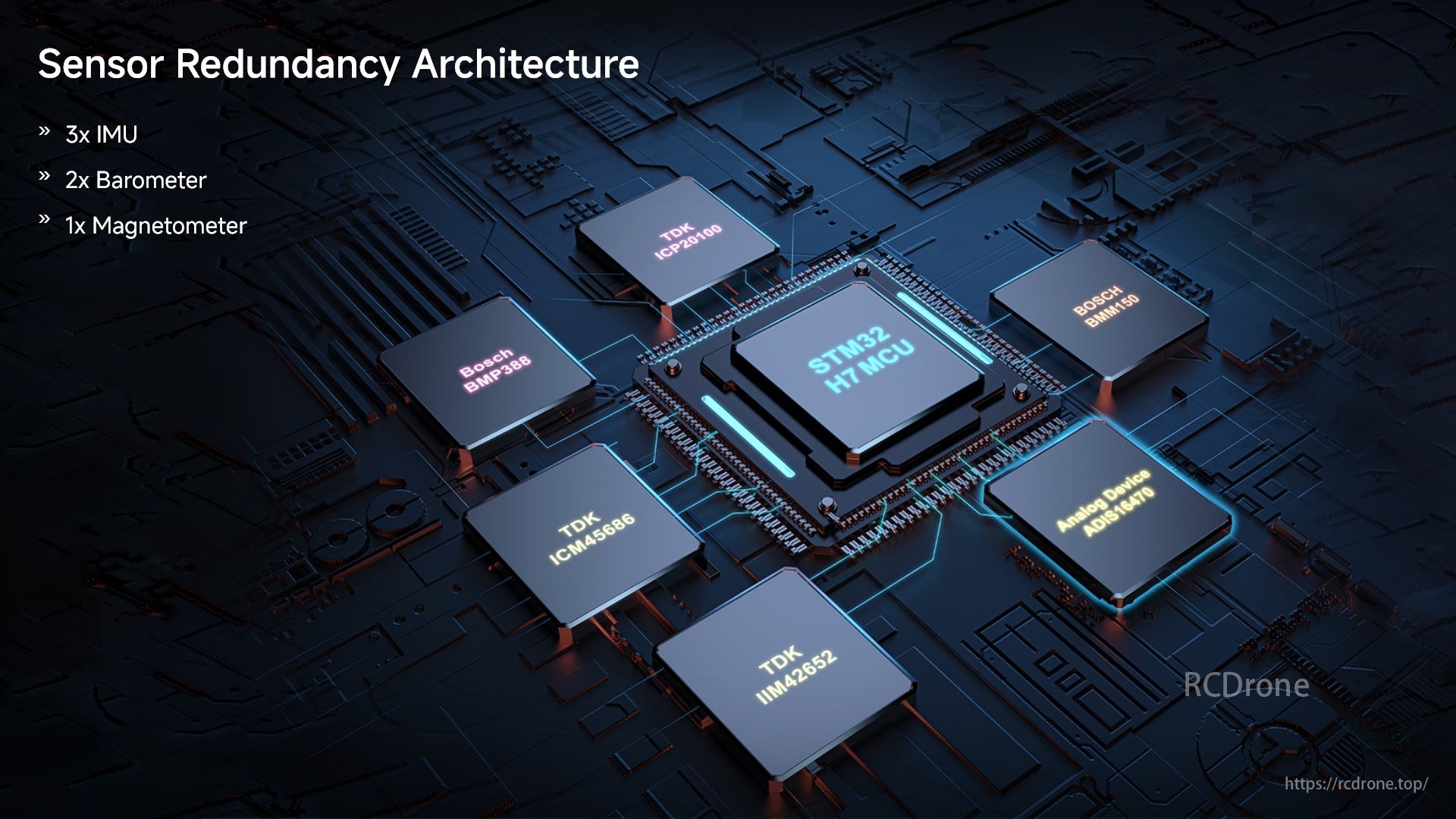
感測器冗餘架構包括 3x IMU、2x 氣壓計和 1x 磁力計,採用 STM32 H7 MCU、TDK IC、Bosch BMP388 和 Analog Devices ADIS16470 等組件。
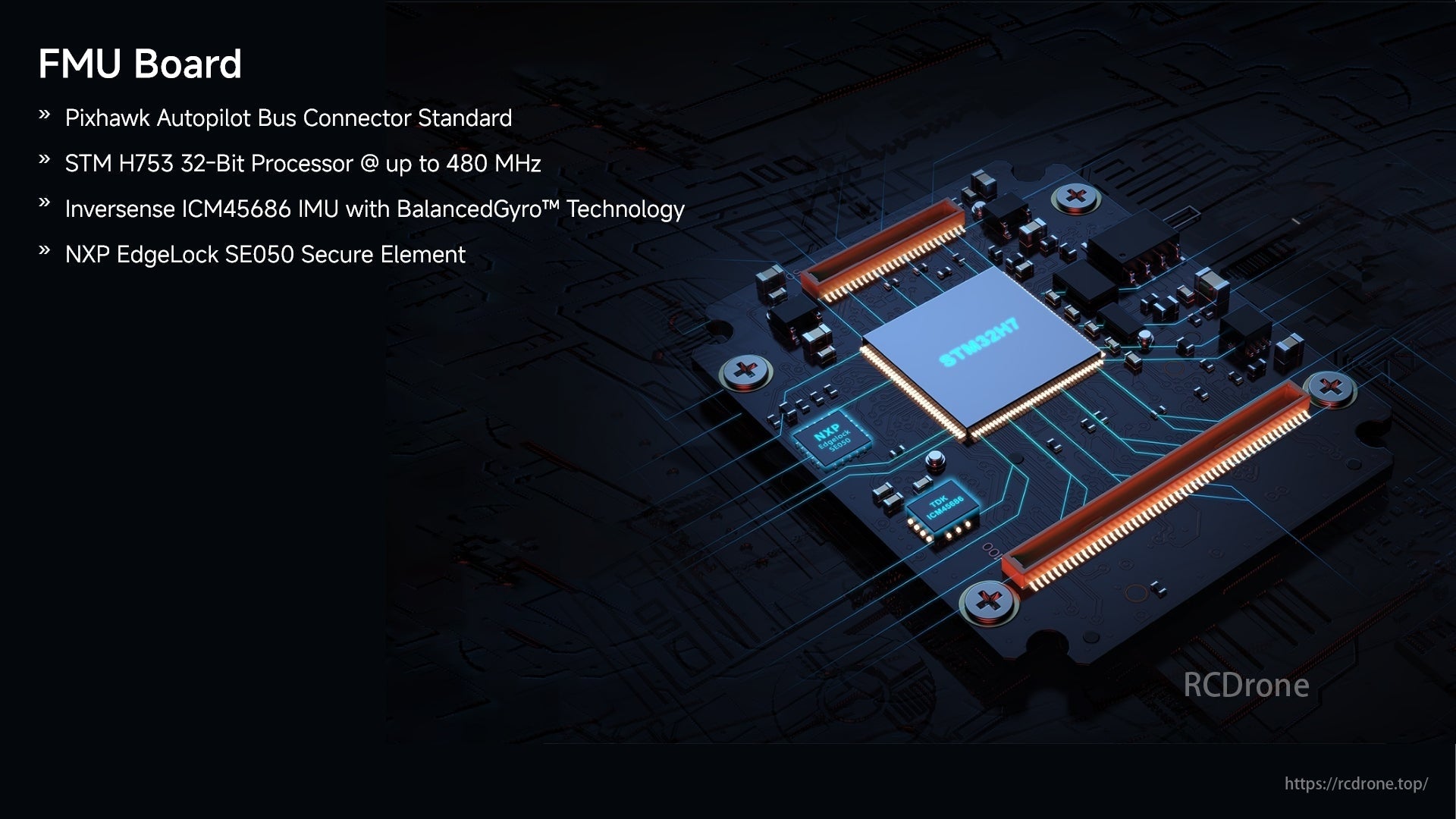
FMU 板採用 Pixhawk 自動駕駛儀匯流排連接器標準、高達 480 MHz 的 STM H753 32 位元處理器、採用 BalancedGyro 技術的 Inversense ICM45686 IMU 和 NXP EdgeLock SE050 安全元件。
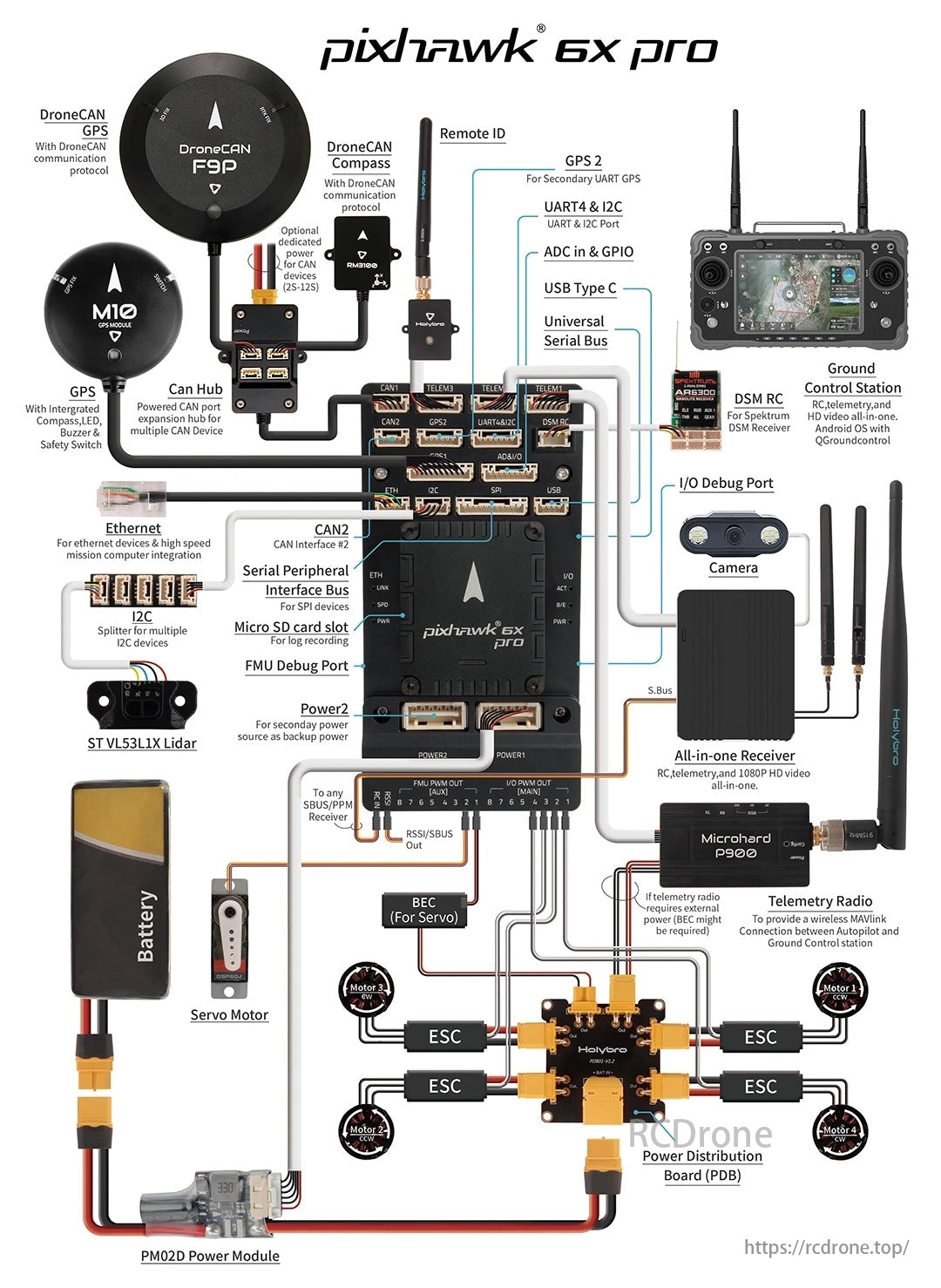
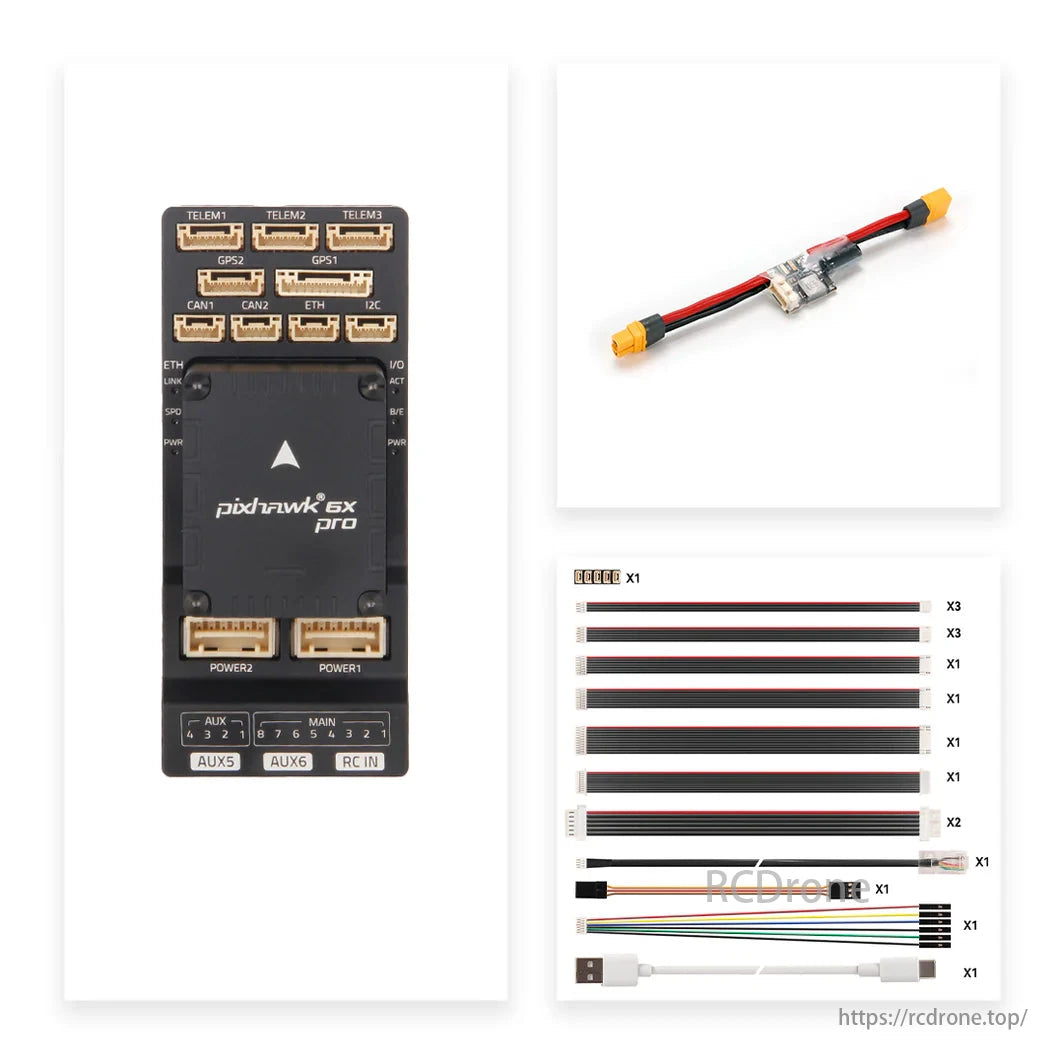
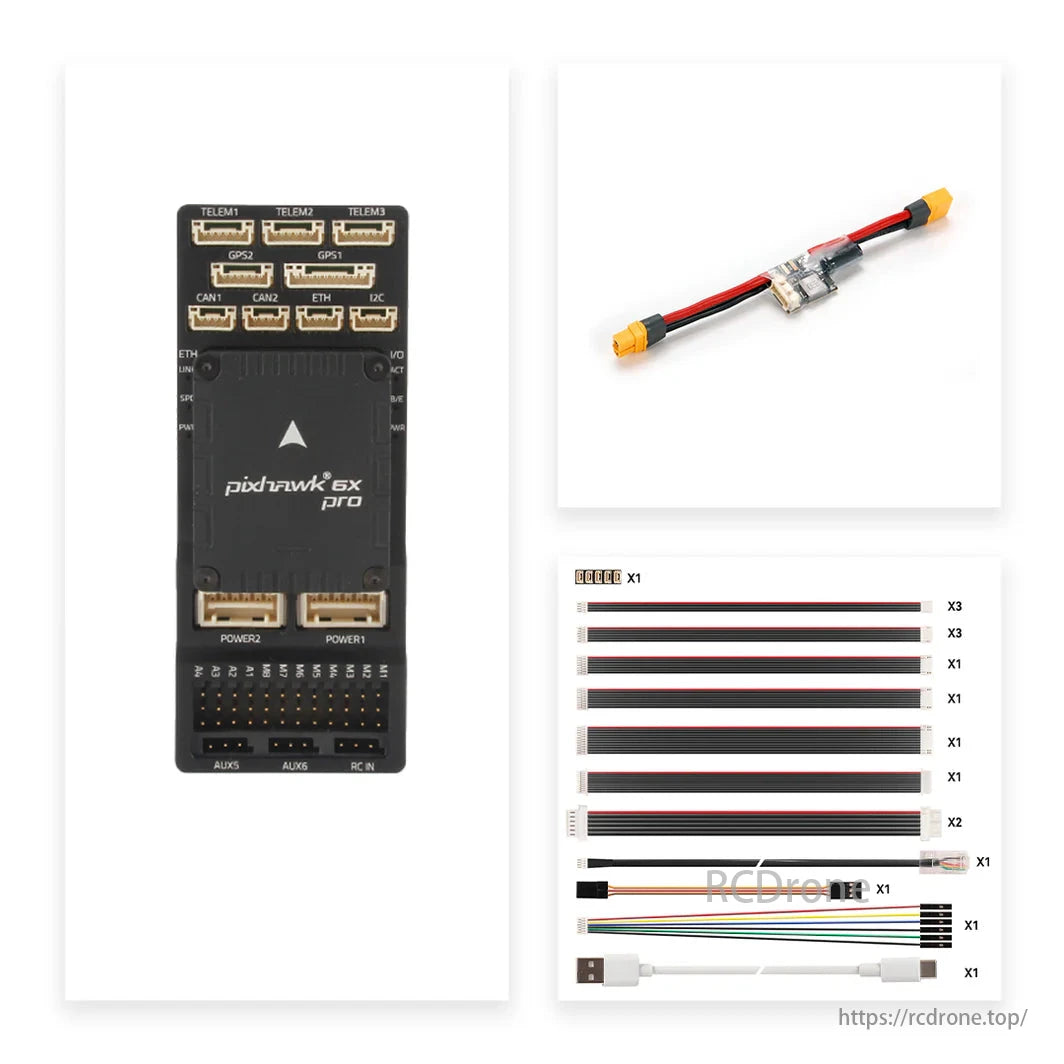
Pixhawk 6X Pro 圖表說明了無人機自動駕駛系統的連接,包括 GPS 模組、指南針、地面控制站、攝影機、遙測無線電、ESC、馬達和配電板。 CAN、I2C、UART 和 USB 等各種介面用於組件之間的通訊。
Related Collections