








1.如何連接?
使用6P線連接pixhawk飛控。 由於韌體不同,有些韌體可以使用兩個端口,有些韌體只能使用其中一個端口。因此,請尋找用於連接的可用連接埠之一。
如果使用PX4固件,則只能使用TELEM1,且不能使用TELEM2。
對於Ardupilot韌體,建議使用TELEM2連接埠。或找到用於連接的可用連接埠之一。
對於 PX4 韌體,應使用 TELEM1 連接埠。
2.如何使用?
請注意:使用Wifi無線遙測連接時,必須使用3DR電源模組或5V電調為飛控供電。 USB 無法插入,因為 USB 優先權高於無線電遙測。如果插入 USB 電纜,則無法用於無線電遙測傳輸。
wifi熱點名稱為“Drone”,因此請使用電話或電腦連接到該熱點,密碼為12345678。
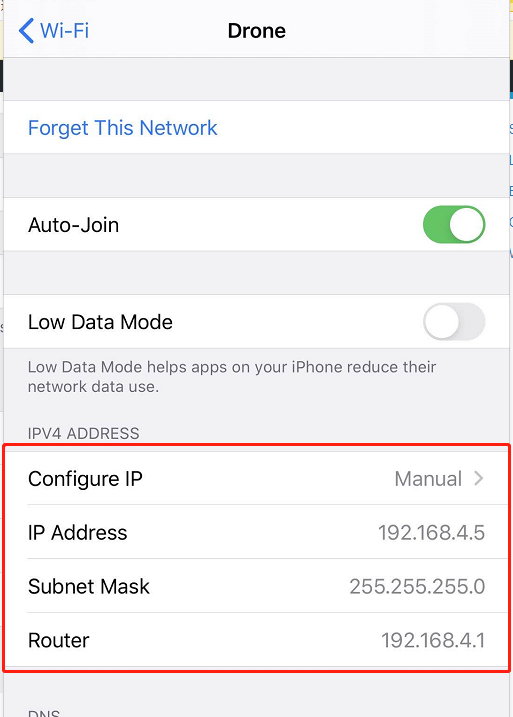
注意:某些裝置(例如某些iphone IOS系統)無法自動取得ip,您應該手動設定。
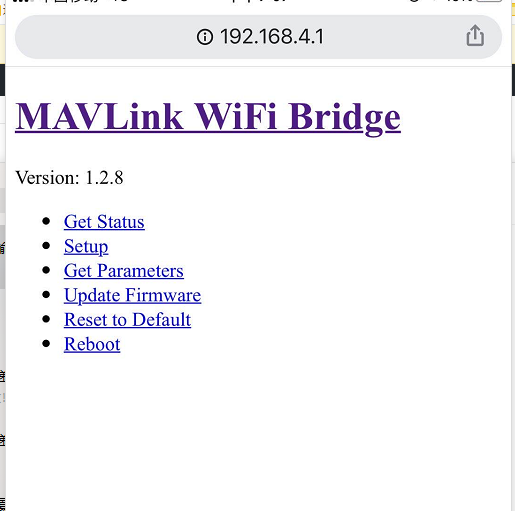
將設定 IP 設定為手動。 IP 位址設定為“192.168.4.5”或其他,但不能設定為“192.168.4.1”,最後一個數字不能超過254。 )。將路由器設定為「192.168.4.1」(應該設定該值,不能設定其他值) 當您的裝置成功連接該熱點後,您可以使用瀏覽器存取http://192.168.4.1,可以修改參數。
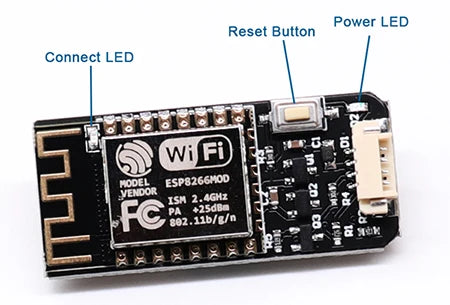
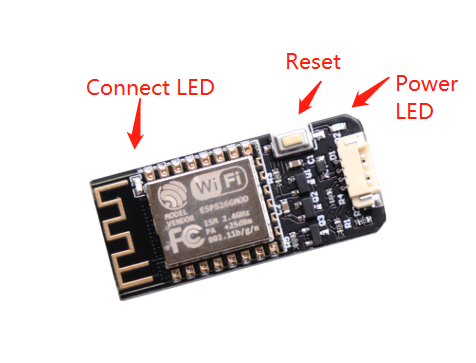
注意,該按鈕是重設按鈕,而不是重啟按鈕,當按下按鈕時,如果修改某些參數,則所有參數將設定為預設值。
電源 LED:通電時,紅色 LED 亮起。
連接LED:與地面控制器(例如Mission Planner或Qgroundcontrol)連接成功時,藍色LED會閃爍。當與地面控制斷開時,藍色 LED 亮起。
1.如何使用Mission planner?
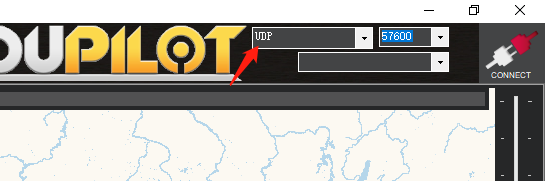
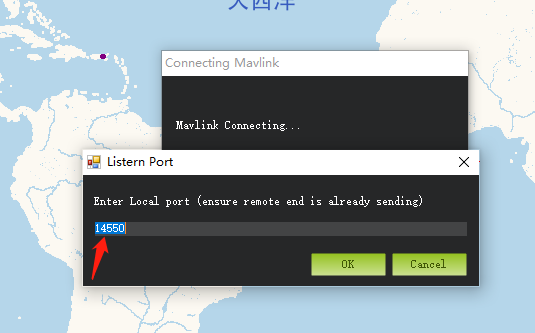
首先,將您的 PC 成功連接到熱點無人機。選擇 UDP。然後按一下「連線」按鈕,使用 14550 連接埠。按一下「確定」。 wifi模組預設波特率為57600,但115200或其他也可以。
2.如何使用電話 適用於 Android:下載 qgroundcontrol(僅適用於 pixhawk,不適用於 APM) 從這裡開始,http://qgroundcontrol.com/downloads/ 從此下載 DroidPlanner,https://github.com/DroidPlanner/Tower/releases 對於 iPhone(IOS):在應用程式商店中搜尋 qgroundcontrol。
qgroundcontrol(僅適用於 pixhawk,不適用於 APM)可以自動連接,DroidPlanner 在連接到 groundcontrol 之前應選擇「UDP」和「14550」連接埠。


Pixhawk 2.4.8 PX4 PIX 32 位元飛行控制器 - M8N GPS / Wifi 遙測模組 / 安全開關蜂鳴器 RGB I2C 4G SD OSD / OLED
Pixhawk 2.4.8 PX4 PIX 32 位元飛行控制器 - M8N GPS / Wifi 遙測模組 / 安全開關蜂鳴器 RGB I2C 4G SD OSD / OLED
RCDrone
無法載入取貨服務供應情況
Pixhawk 2.4.8 PX4 PIX 32 位元飛行控制器規格
使用:車輛與遙控玩具
升級零件/配件:框架
工具用品:研磨
技術參數:數值3
遠端控制週邊設備/設備:遙控器
建議年齡:12+y,14+y
遙控零件與配件:速度控制器
產地:中國大陸
型號:Pixhawk 2.4.8
材質:金屬
四輪驅動屬性:馬達
對於車輛類型:飛機
品牌名稱:Readytosky
ReadyToSky是一家專業的FPV遙控模組配件提供者。如果您有興趣了解有關批發或批量購買選項的更多信息,請隨時與我們聯繫。

適用於 Pixhawk 2.4.8 PIX PX4 飛行控制的 Pixhawk OSD OLED 顯示器 飛行狀態 連接到 I2C 介面
適用於Pixhawk等飛控,用於顯示飛行器的狀態資訊。此模組連接到Pixhawk的I2C介面

如何使用 PIXHAWK 的 WIFI 模組?
WIFI V3.0使用32位元CPU,支援TCP和UDP
WIFI V3.0 DroneBridge 網址
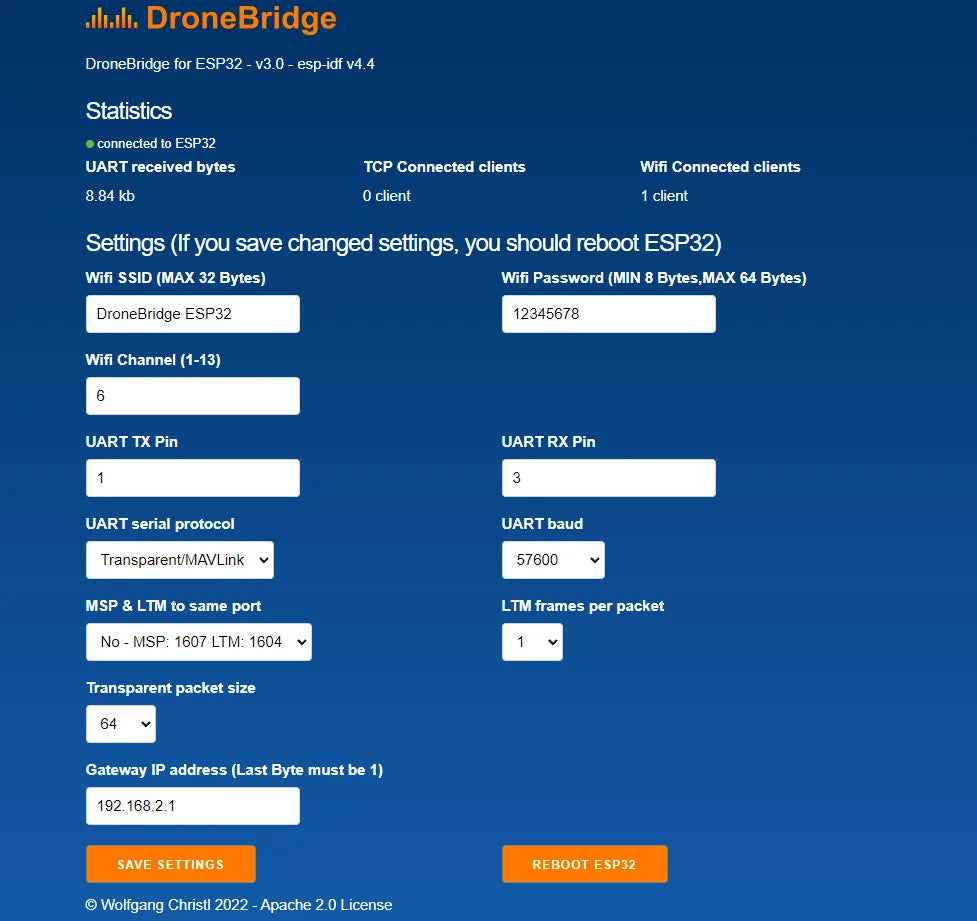
ulul; DroneBridge for ESP32 v3.0 esp idf v4.4 連接到ESP 32 的統計資料UART 接收位元組TCP 連線的客戶端Wifi 密碼(最小8 位元組,最大64 位元組) 如果儲存變更的設置,則應重新啟動ESP33 。
 (依您的選擇發送)
(依您的選擇發送)


Pixhawk 2.4。8 FC + 4G TF 卡+ MBN GPS GPS 支架+ OSD + 電源模組避震器I2C PPM RGB 安全按鈕蜂鳴器Wifi 遙測線Ontk 'GPS 模組PPM 1'

包裝包含: Pixhawk 2.4.8飛行控制器、4G TF 卡、避震器、I2C 模組、PPM 模組、RGB 模組、OLED 顯示器、帶蜂鳴器的安全按鈕以及所有組件的電線。包裝內含:Pixhawk 2.4。 
包裝包括: Pixhawk 2.4.8 飛控、4G TF 卡、避震器、OLED 顯示器、I²C 模組、PPM(脈衝位置調變)模組、帶蜂鳴器的安全按鈕、接線。 t36835>
此Pixhawk 2.4.8 飛行控制器配有 4G TF 卡、安全按鈕、蜂鳴器和輔助輸出線。它還具有一個帶有兩個電源輸入、一個串行端口和 ADC(類比數位轉換器)通道的 TELEM 模組。此外,它具有 GPS 功能,需要電源才能工作。此外,沒有可用的 GPS 資料。預裝備已提交,且 EKF(擴充卡爾曼濾波器)已啟用。
Related Collections
Related Collections



























- 選擇項目後,整個頁面將重新整理。
- 在新視窗中開啟。