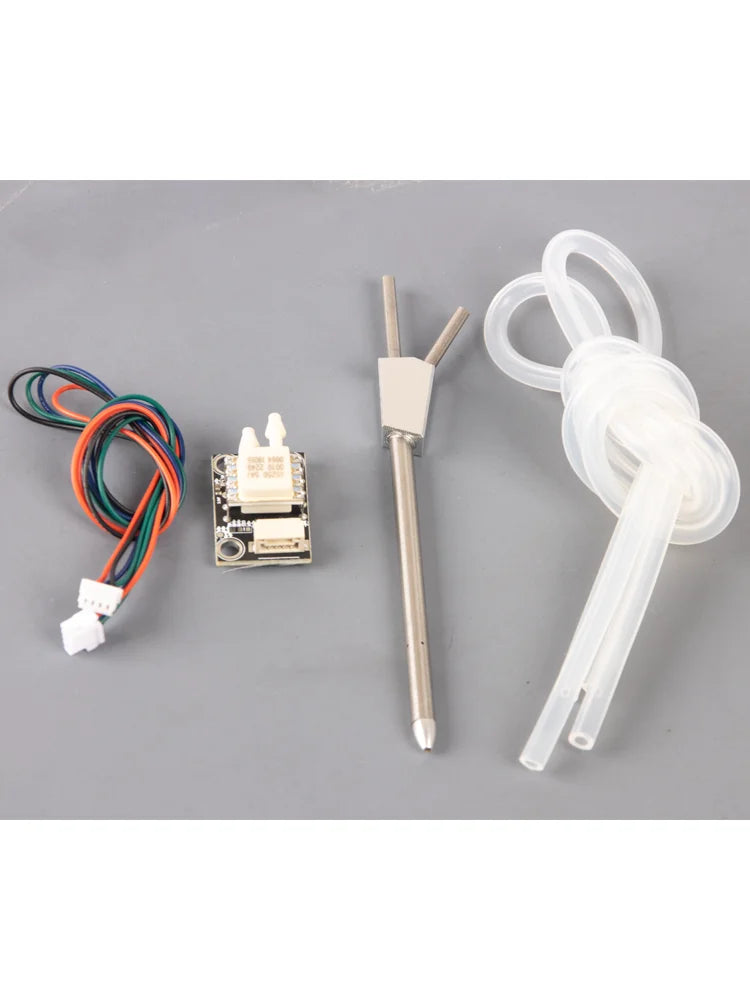
Ardupilot Arduplane 皮託管數位空速計/空速計感知器管適用於 HEX PIXHAWK2/CUAV V5 Pixhawk PX4 飛行控制
Ardupilot Arduplane 皮託管數位空速計/空速計感知器管適用於 HEX PIXHAWK2/CUAV V5 Pixhawk PX4 飛行控制
RCDrone
定價
$52.81 USD
定價
售價
$52.81 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
規格
品牌名稱: 飛輪
起源: 中國大陸
材料: 複合材料
建議年齡: 12+歲
遙控零件和配件: 汽車零件
適用車型: 飛機
使用: 車輛和遙控玩具
升級零件/配件: 車殼
遠端控制週邊/設備: 遙控器
工具耗材: 電池
技術參數: 值 2
型號: Crius 電源模組
四輪驅動屬性: 輪胎