

















SteadyWin GIM3505-8 內建行星減速馬達 — 四足機器人關節模組,8:1齒輪,24V,CAN,IP54
SteadyWin GIM3505-8 內建行星減速馬達 — 四足機器人關節模組,8:1齒輪,24V,CAN,IP54
SteadyWin
定價
$80.00 USD
定價
$90.00 USD
售價
$80.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
SteadyWin GIM3505-8 內建行星減速馬達四足機器人關節模組,專為緊湊型機器人關節和執行器組件設計。GIM3505-8 整合了 8:1 行星減速器、無刷馬達及板載驅動選項,以提供四足機器人、機器手臂、人形關節及類似機電系統的受控運動。
主要特點
- 先進的行星齒輪系統,具有低回程和順暢的運動(齒輪回程:15 弧分)。
- 廣泛的電壓適應性:額定電壓 24 V,工作範圍 12~48 V。
- 高扭矩密度和效率:扭矩常數 0.52 N·m/A,額定扭矩 0.65 N·m,峰值扭矩 1.27 N·m。
- 緊湊的佔地面積:Ø43 × 23.6 mm(不含驅動器);Ø43 × 30 mm(含驅動器)。
- 集成安全保護:過溫、過壓和過載保護(產品文獻中說明的三層保護)。
- CAN 通訊介面;支持獨立編碼器和可選的自定義剎車。
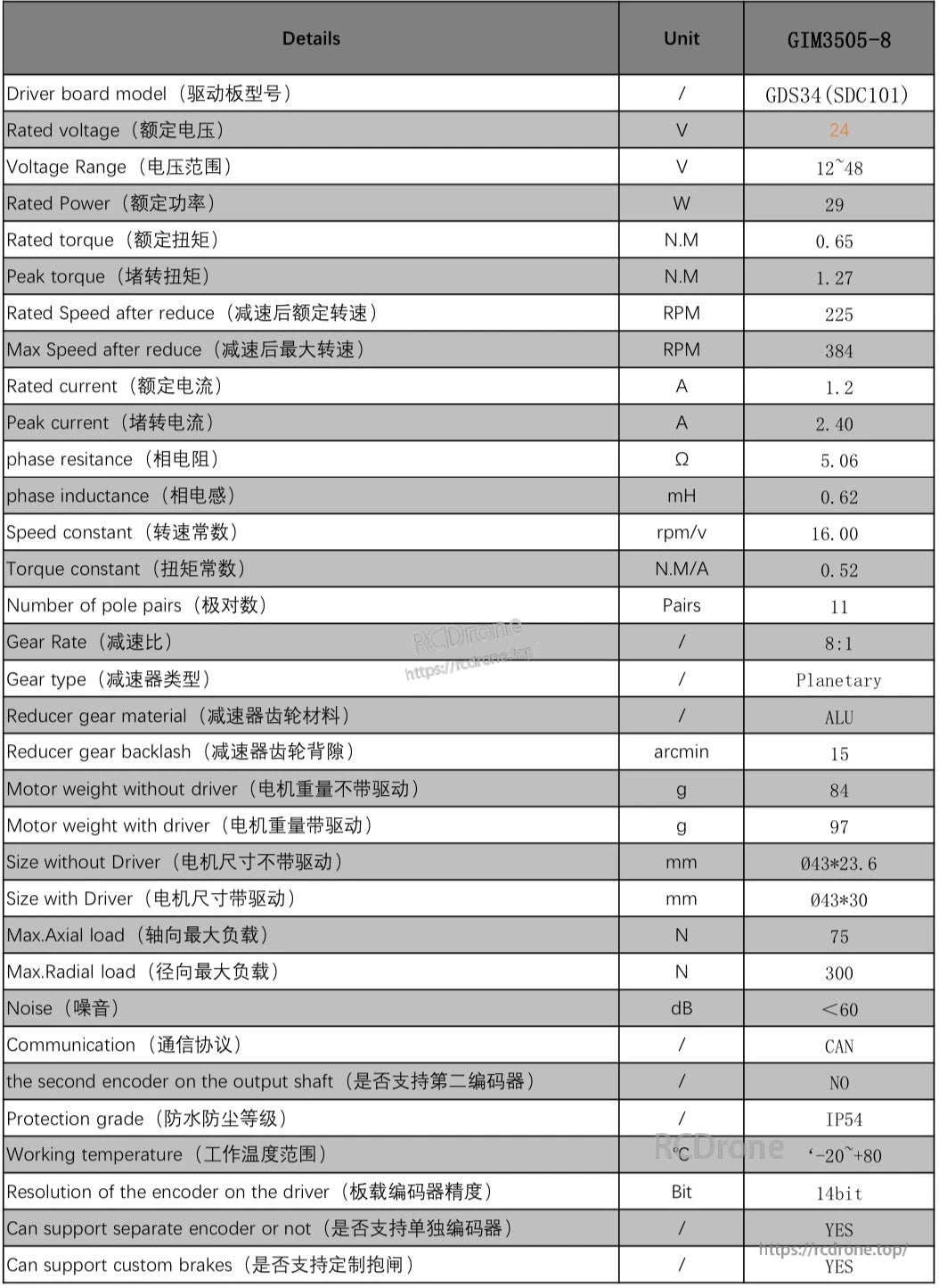
規格
參數 值 ---------------------------------------- -------------------------- 型號 GIM3505-8 驅動板型號 GDS34 (SDC101) 額定電壓 24 V 電壓範圍 12~48 V 額定功率 29 W 額定扭矩 0.65 N·m 峰值(堵轉)扭矩 1.27 N·m 減速後額定速度 225 RPM 減速後最高速度 384 RPM 額定電流 1.2 A 峰值(堵轉)電流 2.4 A 相電阻 5.06 Ω 相電感 0.62 mH 速度常數 16 rpm/V 扭矩常數 0.52 N·m/A 極對數 11 對 齒輪比 8:1 齒輪類型 行星齒輪 減速齒輪材料 ALU 減速齒輪間隙 15 弧分 馬達重量(不含驅動器) 84 g 馬達重量(含驅動器) 97 g 尺寸(不含驅動器) Ø43*23。 6 毫米 尺寸(含驅動器) Ø43*30 毫米 最大軸向負載 75 N 最大徑向負載 300 N 噪音 <60 dB 通訊 CAN 輸出軸上的第二編碼器 否 保護等級 IP54 工作溫度 -20°C 至 +80°C 驅動器上的編碼器解析度 14 位 獨立編碼器支援 是 自定義剎車支援 是
應用
- 四足機器人(腿關節和驅動器)
- 類人機器人關節
- 機器手臂和操作器
- 外骨骼驅動器
- AGV/AMR 轉向和關節模組
- 自主研究和大學機器人項目
如需客戶服務和技術查詢,請聯繫 [email protected]。
手冊
詳細資訊


SteadyWin GIM3505-8 接頭規格:24V,29W,0.65N.M 扭矩,行星齒輪,CAN 通訊,IP54 等級,支持自定義剎車和獨立編碼器,工作溫度範圍 -20°C 至 +80°C。
Related Collections

















