




CEREBOTO OpenArm 7自由度機械臂套件-DIY或預組裝,開源ROS/Python控制
CEREBOTO OpenArm 7自由度機械臂套件-DIY或預組裝,開源ROS/Python控制
CEREBOTO
無法載入取貨服務供應情況
概述
CEREBOTO OpenArm 7DOF 機器手臂是一款研究級的人類尺度機器手臂,專為大學、實驗室、初創公司和認真的製作者設計。擁有 7 個自由度,633 毫米的手臂伸展,典型載重為 4.1 公斤,峰值載重為每隻手臂 6.0 公斤,OpenArm 提供高精度的運動、安全的物理互動和豐富的開源工具。
您可以選擇 DIY 硬體套件進行全面的動手組裝,或選擇工廠校準的即用型成品手臂。可提供單臂、雙臂和四臂配置。
主要特點
-
7DOF 人類尺度機器手臂 – 設計與 160–165 公分的人類手臂長度相匹配,以實現自然操作和遠程操作。
-
高載重 &和穩定性 – 典型載重 4.1 公斤,峰值載重每隻手臂 6.0 公斤,手臂重量輕巧為 5.5 公斤。
-
可回驅動馬達&和符合結構 – 保障人機協作及力控任務的安全、平穩互動。
-
1 kHz CAN-FD 控制迴路 – 實時、低延遲控制,適用於高性能研究和工業級應用。
-
全金屬結構 – 堅固的鋁合金和不銹鋼主結構,提供剛性和耐用性。
-
開源硬體&和軟體 – 開放的 CAD、PCB、韌體和控制軟體,實現深度自定義。
-
支持 ROS、Python 和 C++ – 官方 ROS 整合以及 Python/C++ API,便於快速算法開發。
-
豐富的生態系統和擴展性 – 支持靈巧的機器手、動作捕捉手套和移動底座,實現完整的機器人平台。
技術規格
-
自由度: 每個手臂 7 DOF
-
手臂伸展: 633 毫米
-
典型載重: 4.1 公斤
-
峰值載重: 每個手臂 6.0 公斤
-
手臂重量: 約 5.每臂5公斤
-
材料:鋁合金和不銹鋼結構部件
-
控制介面:CAN / CAN-FD,UART(通過隨附的USB2CANFD-X2適配器在雙臂/四臂版本上)
-
控制頻率:高達1 kHz CAN-FD循環
-
軟體支援:ROS框架,Python API,C++ API
-
人體工學:臂長適合身高160–165厘米的用戶
軟體 &和開源生態系統
OpenArm是一個完全開源的機器臂平台。官方資源包括:
-
網站: openarm.dev
-
文檔: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
教學視頻: 官方YouTube指南以開始使用
通過開放的CAD、PCB和固件文件,您可以修改機械、電子和控制軟件,或為自己的研究主題擴展臂部,添加新的傳感器和末端執行器。
典型應用場景
OpenArm被設計為一個多功能、高精度的研究和教學平台,適用於:
-
大學機器人課程和實驗室實驗
-
研究機構和實驗室項目
-
強化學習和基於物理的人工智慧研究
-
人機互動和協作機器人研究
-
創客空間和開源硬體團隊
-
工程教育和培訓平台
OpenArm以其人類尺度的大小和柔順的驅動方式,非常適合於操作、遠程操作、模仿學習、輔助機器人等應用。
產品版本 &及配置
版本 1 – DIY 硬體套件
-
適合擁有強大動手能力的用戶,想深入了解機械結構。
-
包括所有機械、電氣和 3D 打印部件;您根據手冊自行組裝和校準機械臂。
版本 2 – 完成的機器臂
-
適合需要即插即用平台的研究機構、實驗室、公司和教育工作者。
-
在發貨前完全組裝、調整和校準;開箱即用。
可用的臂配置(根據列表):
-
DIY 套件 – 單臂
-
完成臂 – 單臂
-
DIY 套件 – 雙臂
-
完成臂 – 雙臂
-
DIY 套件 – 四臂
-
完成臂 – 四臂
包裝內容
每個 OpenArm 套件或完成系統通常包括:
-
鋁合金和不銹鋼主要結構組件
-
馬達、驅動板、電源和電纜
-
3D 打印部件和螺絲套件
雙臂和四臂版本: 一個官方BOM兼容的 USB2CANFD-X2 設備(CEREBOTO是授權的國內代理)用於PC與CAN-FD之間的通信。
支援的硬體擴展
OpenArm 支援多種硬體附加裝置(另售),使您能夠構建完整的機器人系統:
-
靈巧機器手 – 用於精細操作和抓取研究。
-
動作捕捉手套組 – 用於直觀的遠程操作和模仿學習。
-
移動底座 – 將 OpenArm 轉變為移動操控平台。
常見問題
問:機器手臂可以立即使用嗎?
答: 完成的手臂版本在工廠已完全調整和校準—只需開機即可開始使用。DIY 硬體套件需要您根據說明組裝和設置系統。
問:OpenArm 是否與 ROS 或其他中介軟體相容?
答: 是的。OpenArm 正式支持 ROS 框架,您也可以通過 Python 和 C++ API 控制機械臂。
問:這個產品適合誰使用?
答: 大學和研究所的研究人員、人工智慧 &及機器人實驗室、教學課程、工程訓練中心,以及進階愛好者。
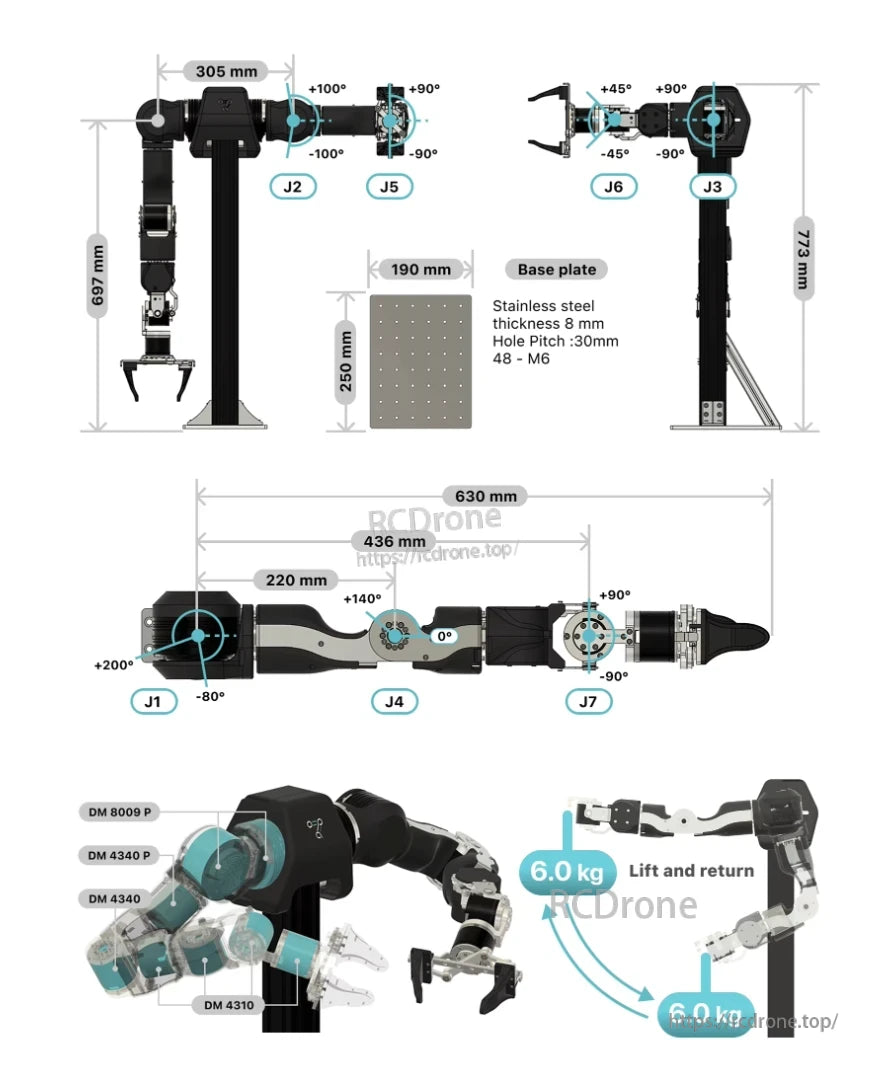
Cereboto OpenArm 7DOF 機械臂擁有七個關節(J1–J7),具有明確的角度範圍。其高度為 697 毫米或 773 毫米,伸展距離為 630 毫米,安裝在 190×250 毫米的不銹鋼底板上——厚度為 8 毫米,並有 48 個 M6 孔,間距為 30 毫米。由 DM8009P、DM4340P、DM4340 和 DM4310 馬達驅動,能夠精確處理 6.0 公斤的負載。設計用於工業和研究用途,兼具結構穩健性和精確的運動控制。




