






CUAV Pixhawk V6X V2 無人機控制器,適用於PX4 ArduPilot,STM32H753IIK6,RM3100,100Mbps乙太網路
CUAV Pixhawk V6X V2 無人機控制器,適用於PX4 ArduPilot,STM32H753IIK6,RM3100,100Mbps乙太網路
CUAV
無法載入取貨服務供應情況
概述
CUAV Pixhawk V6X V2 是一款為 PX4 和 ArduPilot 自動駕駛固件設計的 Pixhawk 系列 無人機控制器 。它遵循 Pixhawk FMU v6x 標準和模組化設計理念,具備升級的工業級冗餘感測、恆溫外部時鐘和 MCU 散熱設計、5V/3.3V PWM 電平切換以及專利的減震結構。標準 PMU 2 Lite 電源管理模組支持 70V 輸入和 220A 電流檢測。
主要特點
- H7 雙精度浮點單元 (STM32H753IIK6); 480MHz 雙精度浮點單元; 2M Flash 記憶體
- 工業級異構三重冗餘 IMU 矩陣,具有獨立的總線和電源設計 (IIM-42652, BMI088, ICM-45686)
- 組合雙冗餘氣壓計 (BMP581, ICP-20100)
- 核心減震系統,具有三軸 (X, Y, Z) 減震; 傾斜四角支撐設計; 新型減震材料
- 汽車級 RM3100 磁力計,具有強大的磁干擾拒絕能力
- IMU 外部晶體時鐘補償 (與高精度恆溫外部時鐘一起使用,以減少 ODR 錯誤並提高靈敏度和同步性)
- 恆溫控制系統:熱導矽膠和 IMU 溫度補償以減少與溫度相關的漂移
- 靈活的軟體在5V和3V之間切換。3V PWM 輸出水平
- 集成 100 Mbps 以太網接口,用於與任務計算機和測量相機等設備的高速數據同步
- 支持安全啟動和安全固件更新服務
- 多重冗餘電源設計;支持 2 通道 CAN PMU 輸入;標準配置包括 PMU 2 Lite
- 新增底部安裝孔以便直接螺絲安裝;安裝孔與 M2 標準螺絲兼容
規格
| 處理器 | STM32H753IIK6 |
| 協處理器 | STM32F103 |
| 版本 | Pixhawk V6XV2 |
| CPU / 記憶體(聲明) | 480MHz 雙精度浮點單元;2M Flash 記憶體 |
| 加速度計 & 陀螺儀 | IIM-42652; BMI088; ICM-45686 |
| 指南針 | RM3100 |
| 氣壓計 | BMP581; ICP-20100 |
| PWM I/O | 16 |
| PWM 等級 | 3.3V / 5V (軟體切換) |
| 電源 | 2 (2 個 CAN 電源介面) |
| GPS 端口 | 2 (GPS1: 具備 I2C 和安全開關的 GPS 介面; GPS2: 具備 I2C 和 GPS 的介面) |
| TELEM 端口 | 3 |
| CAN 總線 | 2 |
| PPM RC | 1 (專用 PPM 接收器輸入) |
| SBUS/DSM/RSSI | 2 (1 個 SBUS/DSM/Spektrum 輸入; 1 個類比 3.3V/PWM 輸入 |
| SBUS 輸出 | 1 |
| FMU 調試 | 1 |
| IO 調試 | 1 |
| 以太網 | 1 (100 Mbps) |
| SPI 外部 1 | 1 (SP16 接口用於外部傳感器擴展) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| USB 端口 | 2 (Type-C x1; GH 接口 x1 用於 USB 外部連接) |
| TF 卡 | 1 |
| 電源模組 | 標準 PMU 2 Lite (5V 版本),輸入電壓:12-70V |
| 工作電壓 | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; 電源: 4.85-5.45V |
| 操作溫度 | -20 至 85C |
| 尺寸 | 45 x 85.1 x 29.2 mm |
| 重量 | 控制器: 97.9g; 核心: 43.1g; 載板(包括螺絲): 54.8g |
| 安裝注意事項(圖示文字) | 安裝孔與 M2 標準螺絲兼容; 額定尺寸: 72 mm; 22。50 毫米; 24 毫米 |
包含內容
- Pixhawk V6X V2 x1
- CAN PMU 2 Lite 5V 電源模組 x1
- PMU 2 Lite-5V 頭部電源線 (X7+ (V6X) 版本),線長: 25cm x1
- CAN/I2C 擴展板 x1
- TF 記憶卡 x1
- Type-C 纜線,線長: 100cm x1
- DSM RC 纜線,線長: 30cm x1
- SBUS RC 纜線,線長: 30cm x1
- PPM RC/SBUS 輸出纜線,線長: 30cm x1
- 以太網纜線,線長: 40cm x1
- CAN 纜線,線長: 30cm x1
- TELEM 纜線,線長: 30cm x1
- UART 4 纜線,線長: 30cm x1
- UART4 -> I2C 纜線,線長: 30cm x1
- ADIO 纜線,線長: 30cm x1
- 調試纜線,線長: 10cm x1
- USB -> Type-C 母連接器延長纜線,線長: 50cm x1
- 3M 雙面膠 x2
應用程式
- 與 ArduPilot 和 PX4 兼容
- 支持多旋翼、固定翼、垂直起降固定翼、無人直升機、無人車輛和無人船(潛水器)
- 與任務計算機及其他支持的機載設備進行高速以太網數據同步
有關兼容性檢查和設置問題,請聯繫 [email protected] 或訪問 https://rcdrone.top/.
視頻
詳細資訊

Pixhawk V6X V2 飛行控制器使用 H7 處理器,具備三重冗餘 IMU、雙氣壓計和 RM3100 磁力計,並採用減震設計。

Pixhawk V6X V2 使用 STM32H753IIK6 H7 處理器,以支持基於 PX4 和 ArduPilot 的飛行控制設置。

Pixhawk V6X V2 採用三軸 (X, Y, Z) 減震支架,並配有四個傾斜的角落支撐,以幫助減少振動和噪音。
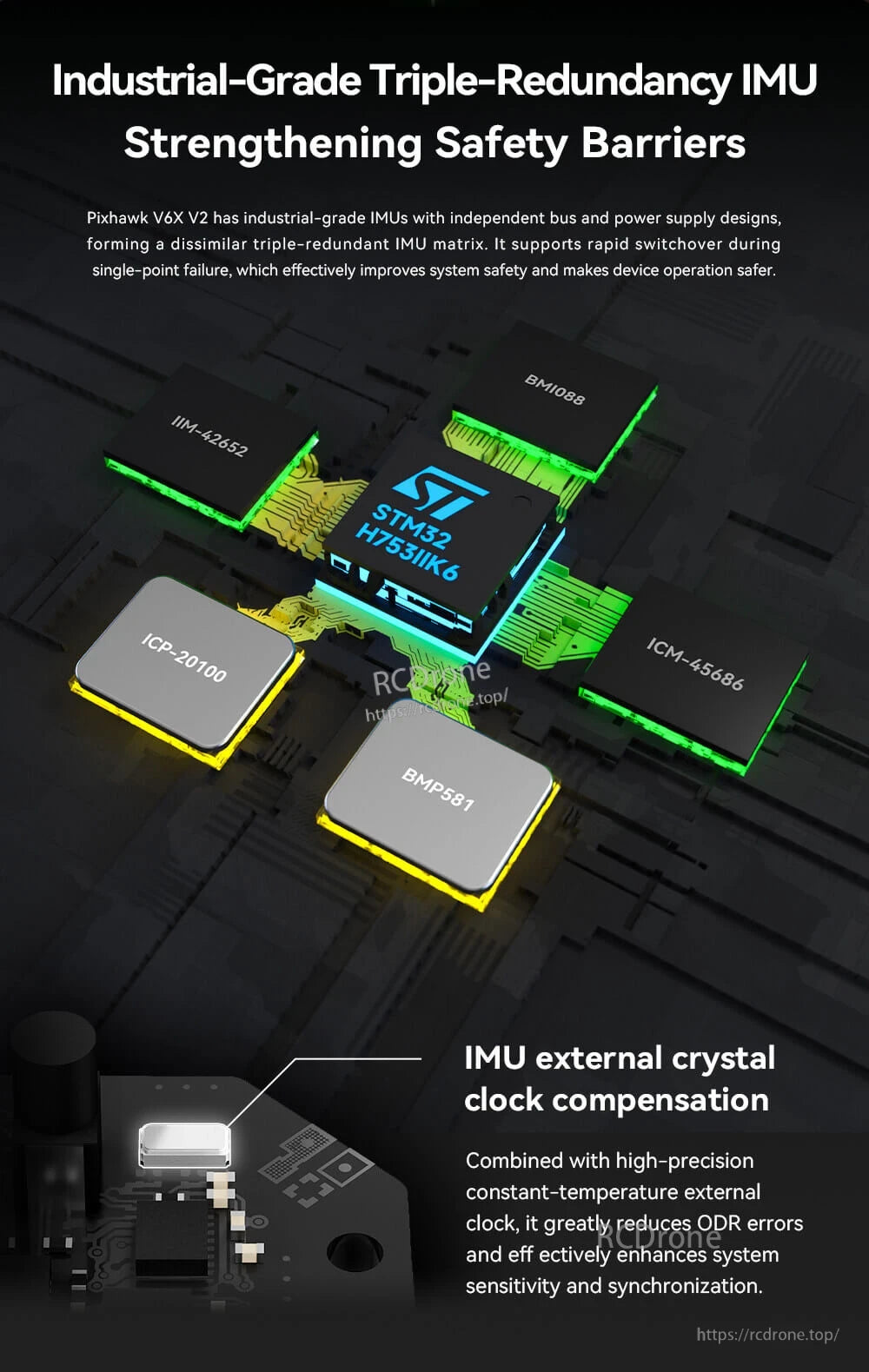
Pixhawk V6X V2 飛行控制器設計特點包括圍繞 STM32H753IIK6 的三重冗餘 IMU 設置,以及用於傳感器定時的外部晶體時鐘補償。

Pixhawk V6X V2 集成了汽車級 RM3100 磁力計,並支持 GPS 方向確定,以實現更穩定的定位和導航。
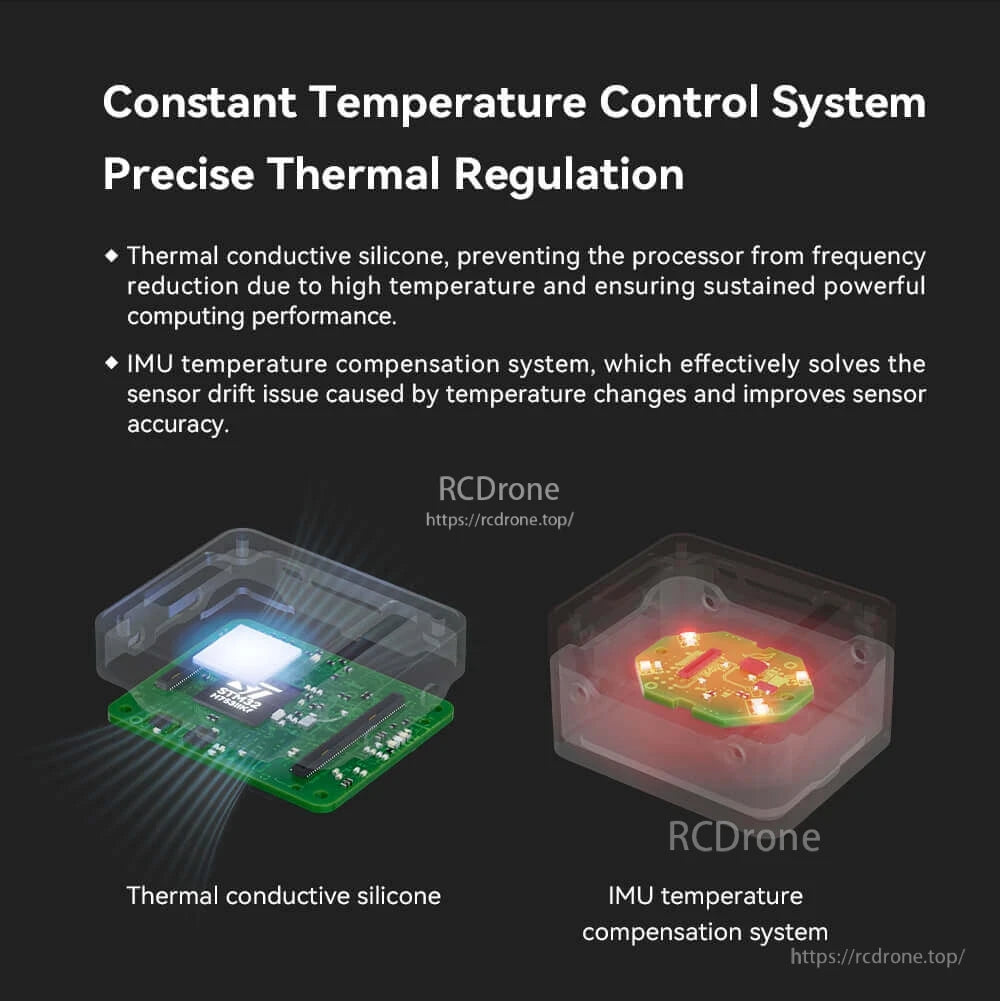
恆溫控制系統使用熱導矽膠和IMU溫度補償來減少與溫度相關的漂移。
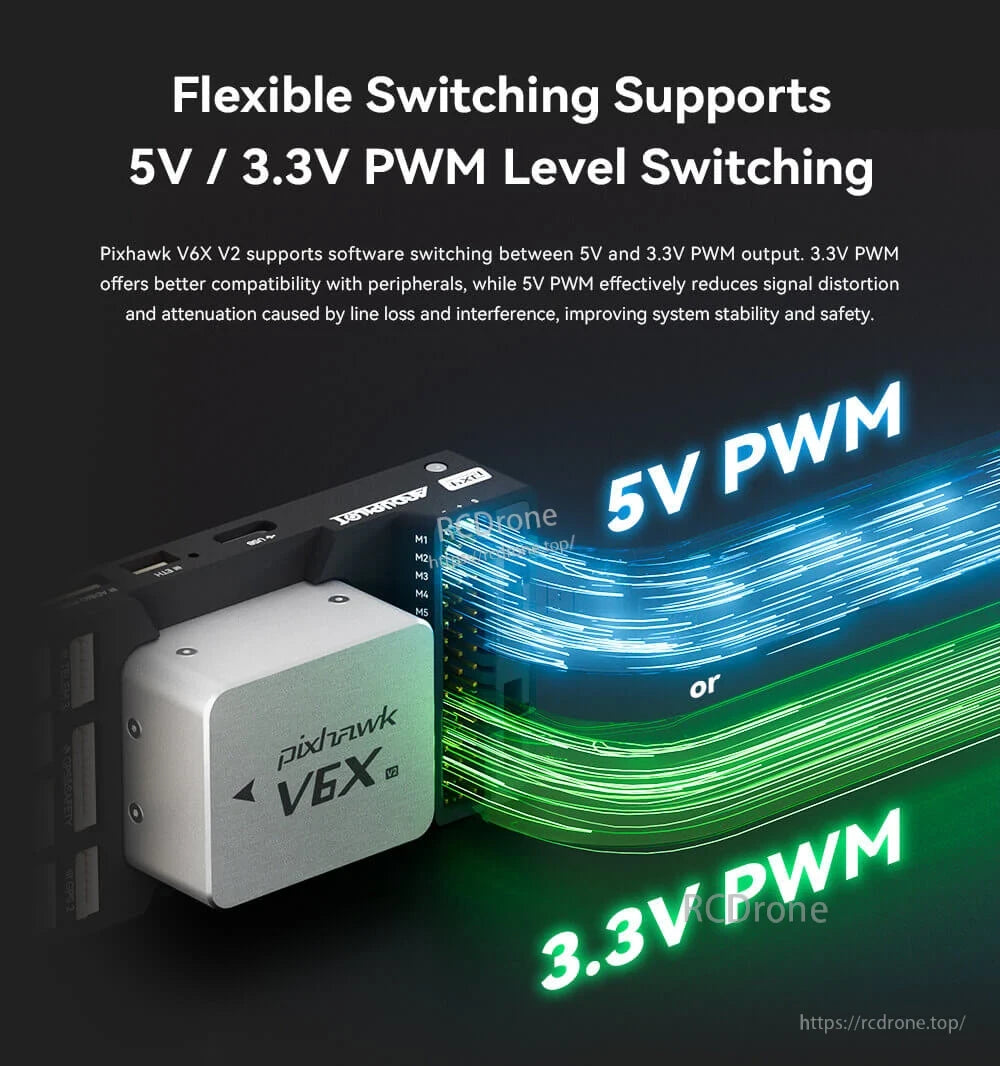
Pixhawk V6X V2支持在5V和3.3V PWM輸出電平之間靈活切換,以便更容易與不同外圍設備兼容。

Pixhawk V6X V2集成了100 Mbps以太網接口,並配有標記的端口,如USB、TELEM3、CAN和GPS & 以確保清晰的布線。
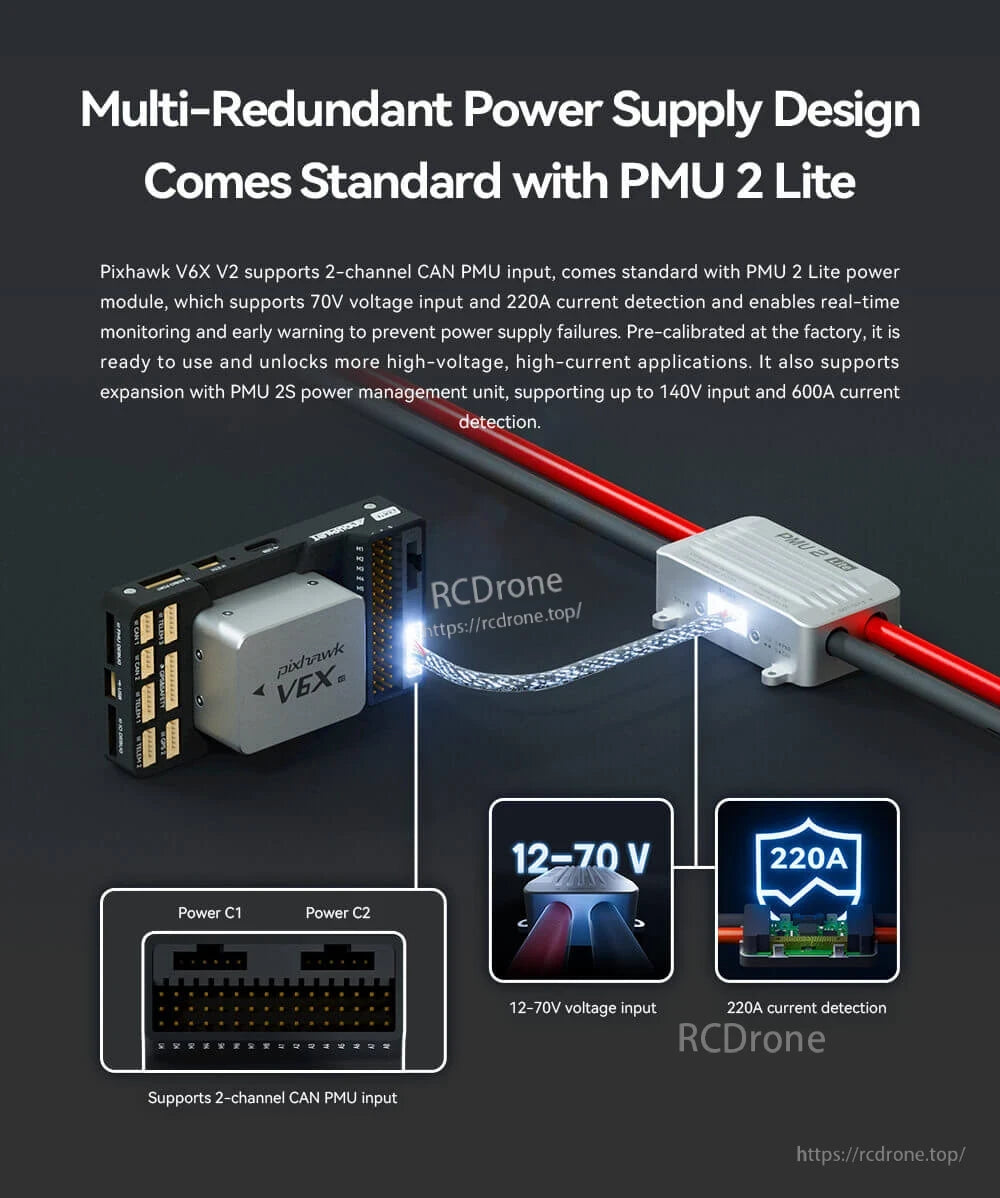
Pixhawk V6X V2與PMU 2 Lite模塊配對,實現多重冗餘電源輸入,支持12–70V和220A電流檢測。

CUAV Pixhawk V6X V2在載板上使用模塊化、可拆卸的核心模塊,以簡化自定義和連接器訪問。
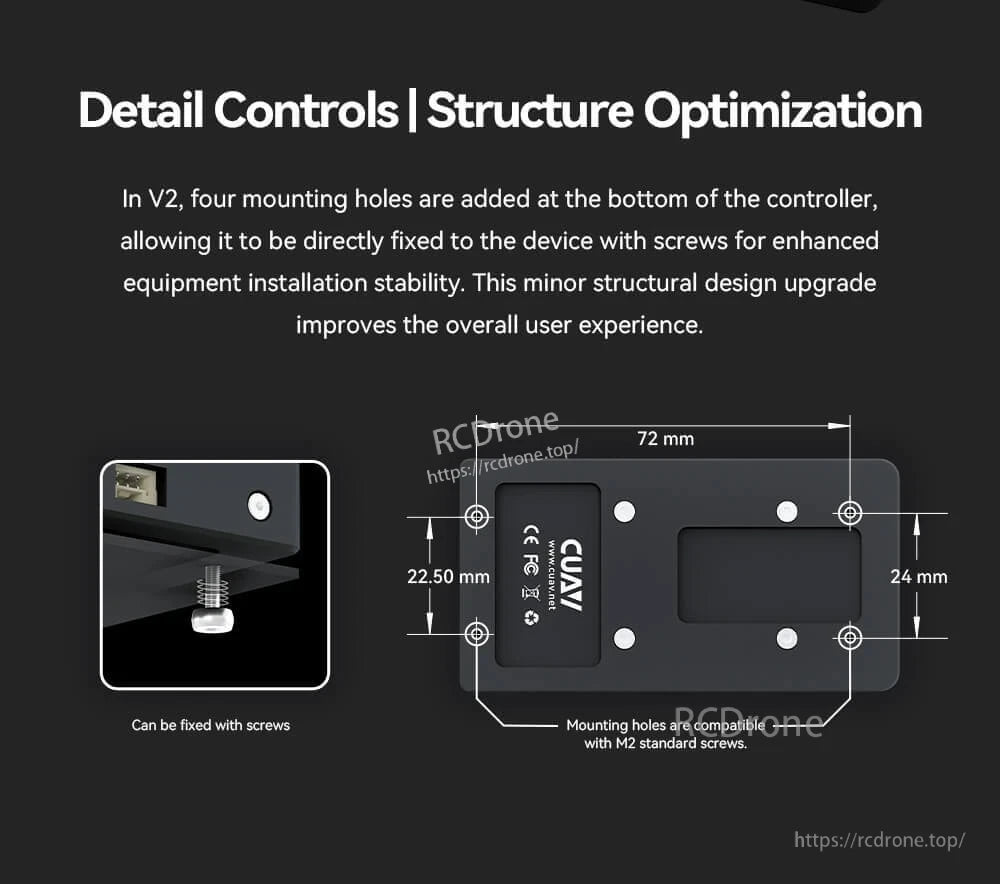
CUAV Pixhawk V6X V2增加了四個M2兼容的底部安裝孔,具有72毫米的佈局,以便更安全的螺絲安裝。

Pixhawk V6X V2 支援 ArduPilot 和 PX4 固件,適用於多種無人平台,包括多旋翼、固定翼飛機以及地面或海洋車輛。
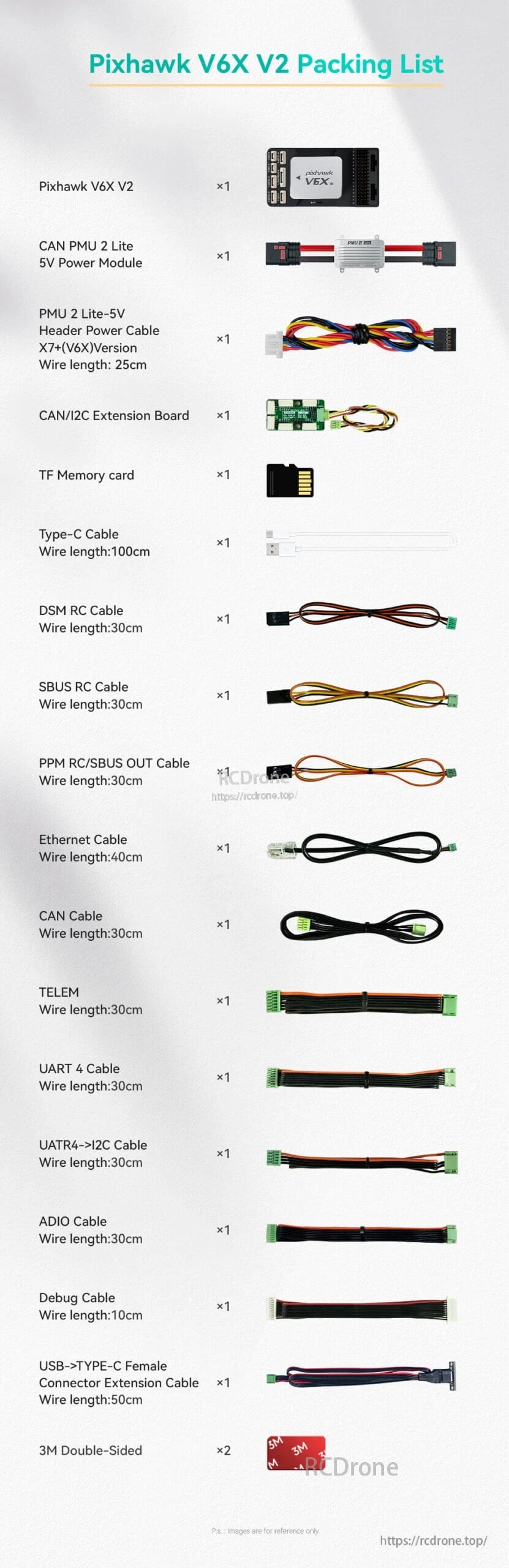
Pixhawk V6X V2 套件包括飛行控制器、CAN PMU 2 Lite 5V 電源模組、TF 記憶卡,以及一套 Type‑C、RC、以太網、CAN、TELEM、UART、ADIO 和調試電纜。
Related Collections


















