





CubeMars AK10-9 V3.0 機器人執行器 – 峰值扭矩53Nm,KV60,雙編碼器,48V FOC驅動
CubeMars AK10-9 V3.0 機器人執行器 – 峰值扭矩53Nm,KV60,雙編碼器,48V FOC驅動
CubeMars
無法載入取貨服務供應情況
概述
CubeMars AK10-9 V3.0 機器人驅動器是一個集成的電源模組,結合了高性能無刷直流電動機、行星齒輪箱、雙編碼器和一個基於FOC的集成驅動器。該產品專為先進的機器人應用而設計,如四足機器人、外骨骼和自動導引車(AGV),可提供高達53Nm的峰值扭矩、0.5毫秒的機械響應,並支持一鍵設置的伺服模式和MIT模式。
憑藉其KV60等級、輕量設計(940克)和9:1的減速比,AK10-9 V3.0在不妥協扭矩密度(高達86Nm/kg)的情況下提供了緊湊性。增強的電磁設計提高了5%的效率,同時保持熱穩定性。
主要特點
⚙️ 集成電源模組
-
將馬達、行星減速器、編碼器和驅動器結合為一個緊湊的940克執行器。
-
支持 位置、速度和加速度的同步控制。
🔁 雙磁編碼器
-
內部:21位解析度
-
外部:15位解析度
-
在斷電期間保持位置,確保 可靠且精確的運動控制。
🧠 智能驅動,單鍵設置
-
內置驅動器支持 伺服 和 MIT控制模式。
-
自動PID自適應消除了調整的複雜性。
💡 提升效率與熱穩定性
-
先進的電磁設計提升了效率5%。
-
緊湊且熱穩定,適合長時間運行。
規格
| 參數 | 數值 |
|---|---|
| 額定電壓 | 48V |
| 控制方式 | FOC(場定向控制) |
| 空載轉速 | 320 rpm |
| 額定轉速 | 235 rpm |
| KV 評級 | 60 rpm/V |
| 減速比 | 9:1 |
| 額定扭矩 | 18 Nm |
| 峰值扭矩 | 53 Nm |
| 額定電流 | 10.7 A |
| 峰值電流 | 31.9 A |
| 扭矩常數(KT) | 0.16 Nm/A |
| 馬達常數 | 0.32 Nm/√W |
| 最大扭矩密度 | 86 Nm/kg |
| 轉子慣性 | 1002 g·cm² |
| 相位電阻 | 248 mΩ |
| 相位電感 | 213 μH |
| 電氣時間常數 | 0.93 ms |
| 機械時間常數 | 0.5 ms |
| 繞組類型 | 星形 |
| 絕緣等級 | C |
| 絕緣電阻 | 1000V 10MΩ |
| 耐壓 | 1000V 5mA / 2s |
| 極對數 | 21 |
| 槽數 | 36 |
| 編碼器數量 | 2(雙磁編碼器) |
| 內部編碼器解析度 | 21位 |
| 外部編碼器解析度 | 15位 |
| 溫度傳感器 | NTC MF51B 103F3950 |
| 溫度範圍 | -20℃ 到 +50℃ |
| 重量 | 940g |
應用
腿式機器人 (e.g.四足動物、二足動物
-
外骨骼
-
自動導引車 (AGV)
-
人機互動系統
-
精密機器手臂
為什麼選擇 AK10-9 V3.0?
-
高扭矩且體積小巧
-
集成控制以便於開發
-
通過雙編碼器增強可靠性
-
理想用於先進機器人技術和研究
下載
詳細資訊

CubeMars AK10-9 V3.0 KV60@48VDC actu驅動性能圖。顯示輸出功率、效率、電流和速度與扭矩的關係。效率在28%時達到峰值,速度從1080 RPM開始,功率隨扭矩增加而增加。

AK V3.0 機器人驅動模組:高效且易於使用,配備AK10-9驅動器,適用於機器人技術。
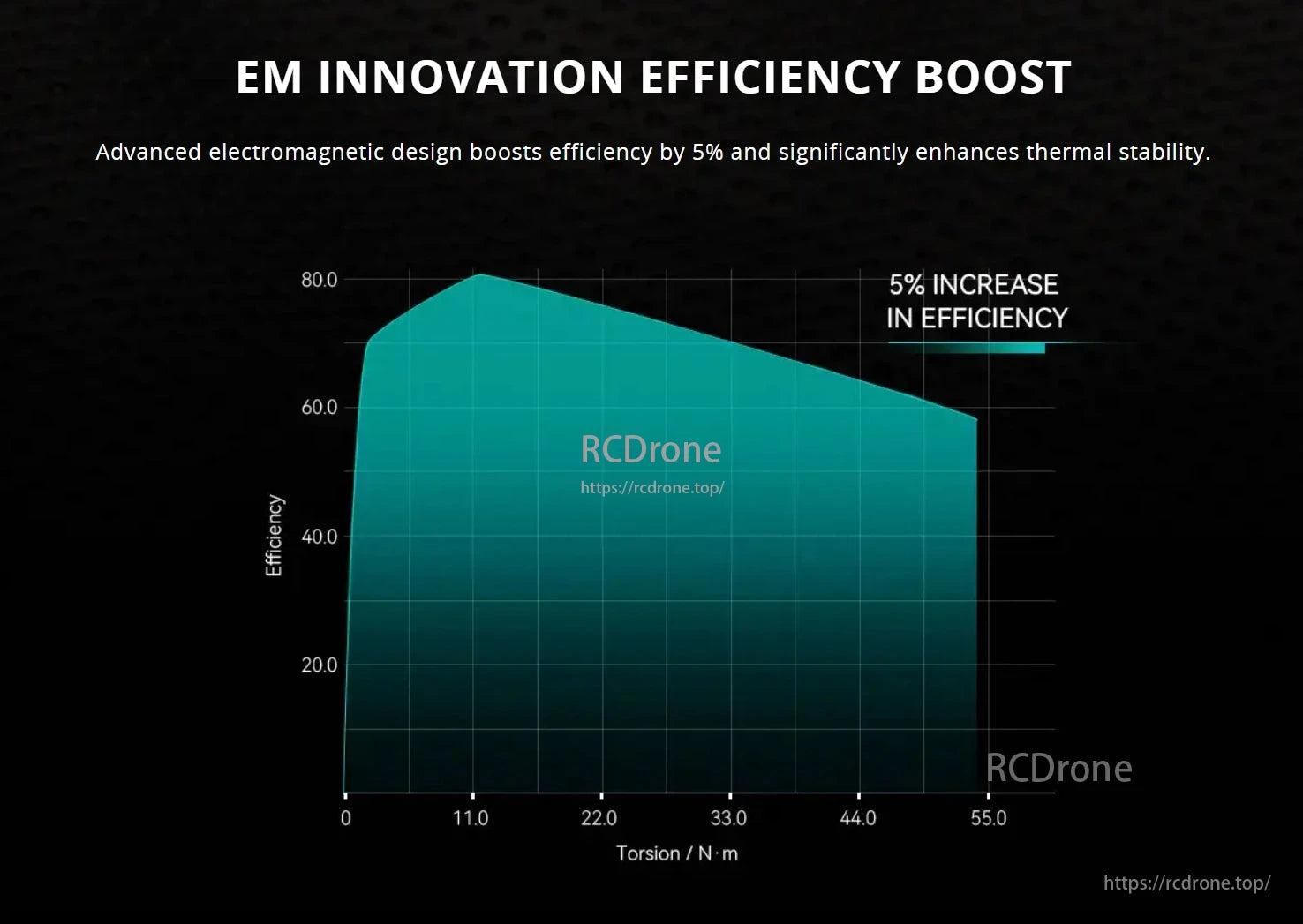
EM創新效率提升:先進的電磁設計提高5%的效率並增強熱穩定性。圖表顯示在扭轉值範圍內的效率增益。
驅動器升級操作簡便。一鍵識別和設置伺服和MIT模式的參數。用戶友好的界面便於狀態監控。

雙重編碼器確保在停電期間的精確定位。

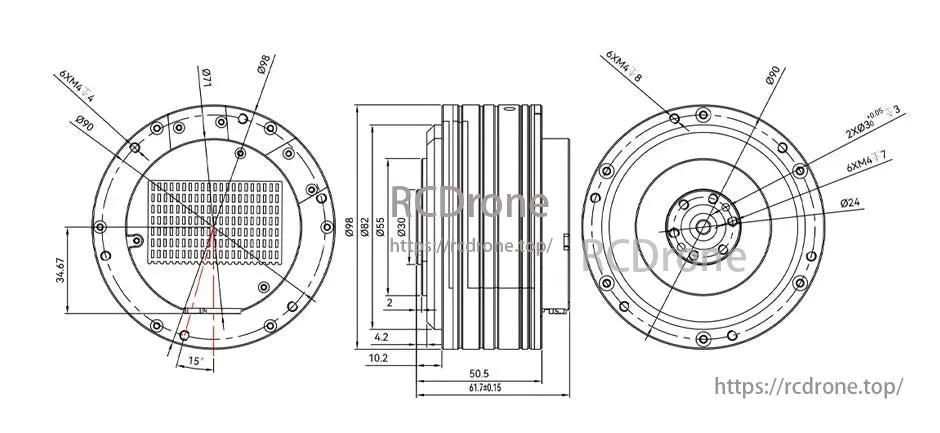
緊湊、輕量的執行器整合了高性能馬達、齒輪箱和驅動板。

CubeMars AK10-9 機器人執行器具有黑色XT30 2+2接口,確保可靠的信號傳輸,以及白色CJT-3針接口,便於通信和參數調整。





