





CubeMars AK80-64 KV80 機器人執行器 – 峰值扭矩120Nm,齒輪比64:1,MIT模式
CubeMars AK80-64 KV80 機器人執行器 – 峰值扭矩120Nm,齒輪比64:1,MIT模式
CubeMars
無法載入取貨服務供應情況
概述
The CubeMars AK80-64 KV80 機器人驅動器是一款高度集成的動力單元,專為腿部機器人、外骨骼和自動導引車(AGV)設計。該驅動器具有強大的48Nm 額定扭矩和120Nm 峰值扭矩,結合了無刷直流電機、自研的 64:1 行星齒輪箱、14位元磁性編碼器和集成的 FOC 驅動,以緊湊的形式提供。支持6–12S 電壓、MIT 和伺服控制模式以及PID 自動調整,AK80-64 能夠在高負載應用中實現精確和高效的運動控制。
主要特點
-
高扭矩輸出: 額定48Nm,峰值扭矩120Nm
-
集成驅動與編碼器: 簡化系統設計
-
64:1 行星齒輪箱: 高減速比以提供強大的輸出
-
MIT 控制模式: 平滑的位置、速度和加速度控制
-
廣泛的電壓支持: 兼容24V或48V系統(6–12S LiPo)
-
緊湊且輕量: 僅重850克,高扭矩重量比
-
通訊: CAN與UART,配備XT30PW-M電源連接器
-
低噪音: ≤60 dB @ 65cm距離
規格
| 應用 | Legged Robot,外骨骼,自動導引車 | 峰值扭矩 (Nm) | 120 |
| 驅動方式 | FOC | 峰值電流 (ADC) | 19 |
| 操作環境溫度 | -20℃~50℃ | Kv (rpm/V) | 80 |
| 繞組類型 | 三角形 | Kt (Nm/A) | 0.136 |
| 絕緣級別 | H | Ke (V/krpm) | 13.7 |
| 高壓絕緣 | 1000V 5mA/2s | 相對相電阻 (mΩ) | 220 |
| 絕緣電阻 | 1000V10MΩ | 相對相電感 (μH) | 133.5 |
| 相 | 三相 | 慣性 (gcm²) | 564.5 |
| 極對數 | 21 | Km (Nm/√W) | 0.29 |
| 減速比 | 64:1 | 機械時間常數 (ms) | 0.67 |
| 反向驅動 (Nm) | 4.7 | 電氣時間常數 (ms) | 0.61 |
| 間隙 (°) | 0.18 | 重量 (克) | 850 |
| 溫度傳感器 | NTC MF51B 103F3950 | 最大扭矩重量比 (Nm/kg) | 141.2 |
| 距離電機 65CM 的噪音 dB | 60 | CAN 連接器 | A1257WR-S-4P |
| 基本載荷評級 (動態 C ) N | 2000 | UART 連接器 | A1257WR-S-3P |
| 基本載荷評級 (stat.C0) N | 2520 | 電源連接器 | XT30PW-M |
| 額定電壓 (V) | 24/48 | 內環編碼器類型 | 磁性編碼器 |
| 額定扭矩 (Nm) | 48 | 內環編碼器解析度 | 14位元 |
| 額定速度 (rpm) | 23/48 | 外環編碼器類型 | - |
| 額定電流 (ADC) | 7 | 外環編碼器解析度 | - |
| 編碼器數量 | 1 |
應用
-
腿式機器人: 人形和四足運動
外骨骼: 輔助與康復機器人
-
自動導引車: 自動化導引車中的精確馬達控制
-
機器手臂: 需要高扭矩和精確度的工業及協作應用
詳細資訊
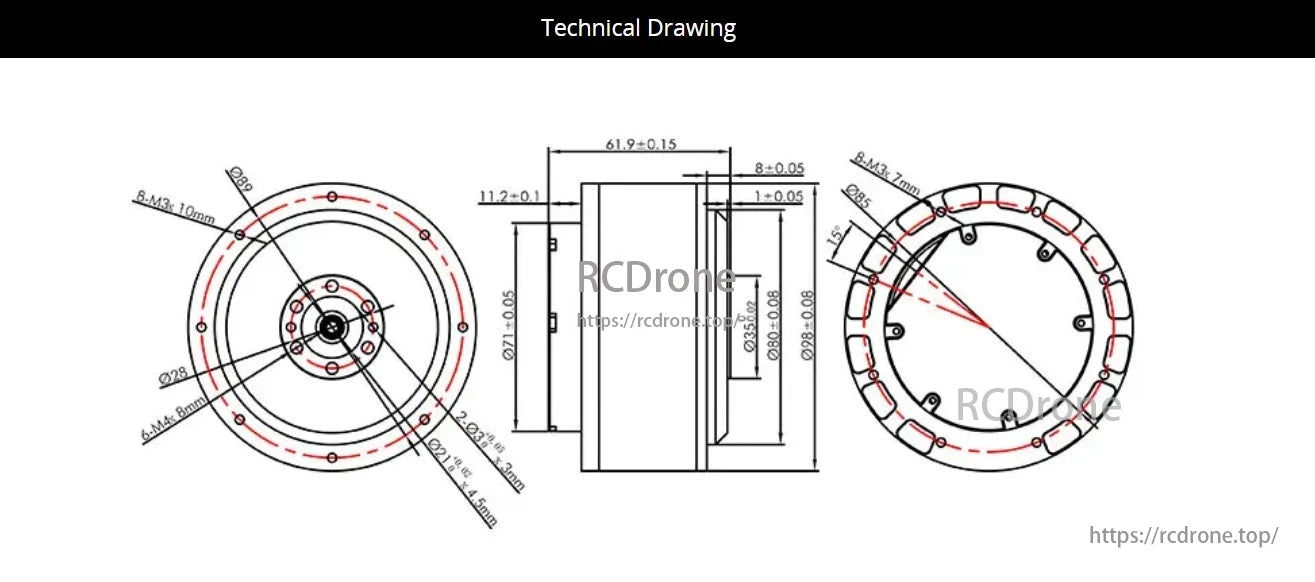
CubeMars AK80 機器人的技術圖紙,包含尺寸和規格。
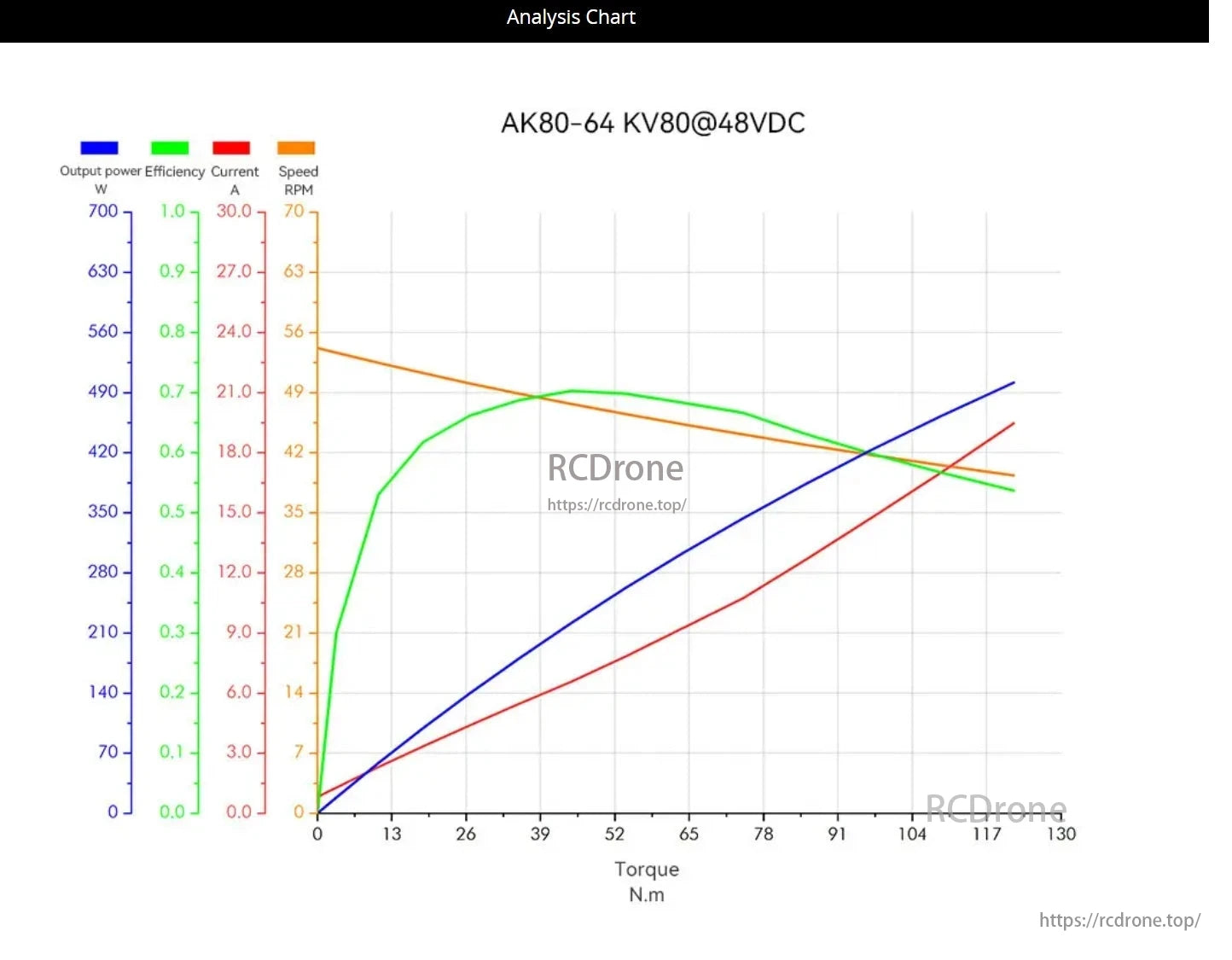
分析圖表顯示 CubeMars AK80-64 KV80@48VDC. Disp的輸出功率效率、電流和速度與扭矩的關係。在52 N.m附近,效率達到0.7的峰值。電流隨著扭矩線性增加。速度隨著扭矩上升而下降,起始於56 RPM。輸出功率隨著扭矩穩步增長。圖表使用藍色、綠色、紅色和橙色線條以提高清晰度,坐標軸標記為瓦特、安培、RPM和N.m。數據展示了電機在不同負載下的性能特徵。

CubeMars AK80-64KV80:兩合一,高集成動態模組,適用於機器人技術。

AK80-64KV80電機:高集成、超輕、高效、動態設計。

低噪音運行,強大動力。較低的齒槽扭矩,平穩運行,高解析度,精確控制達到0.1°。
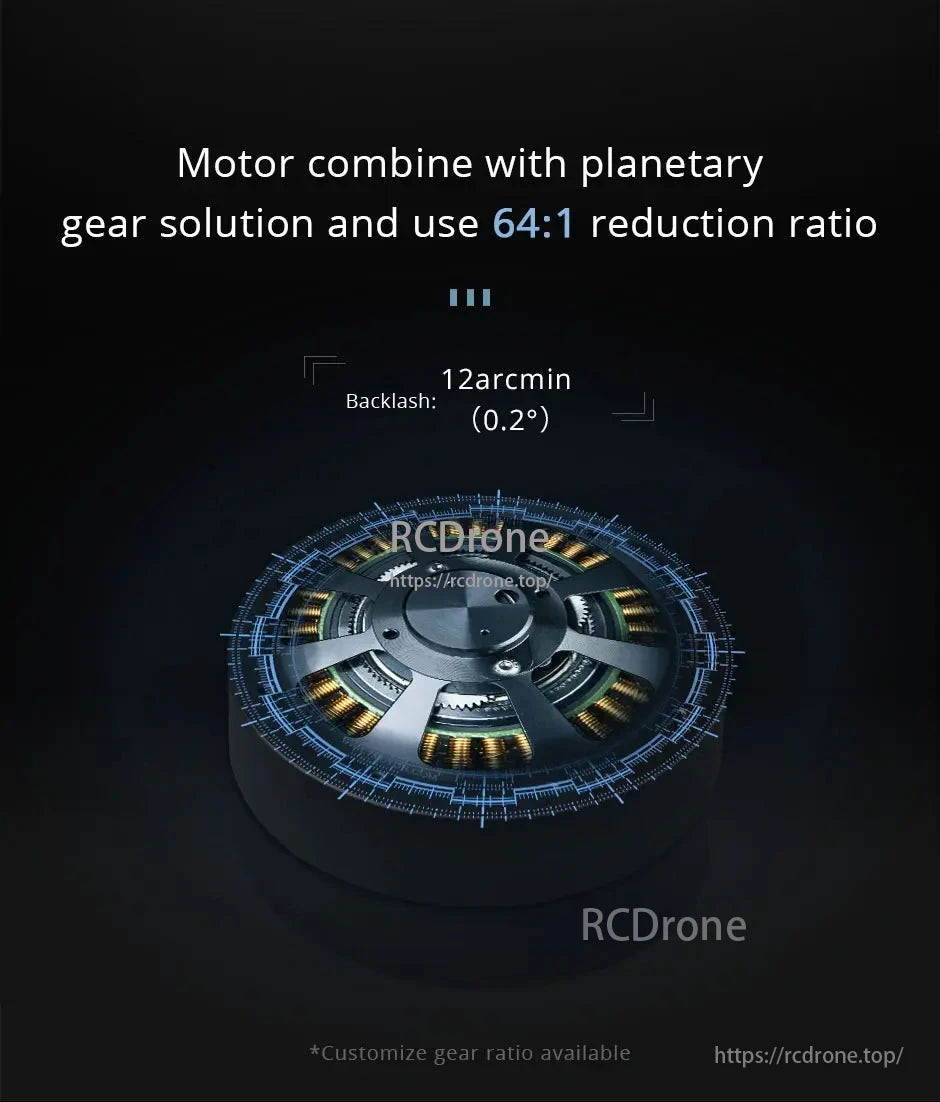
具有行星齒輪的馬達,64:1 比率,12弧分背隙。
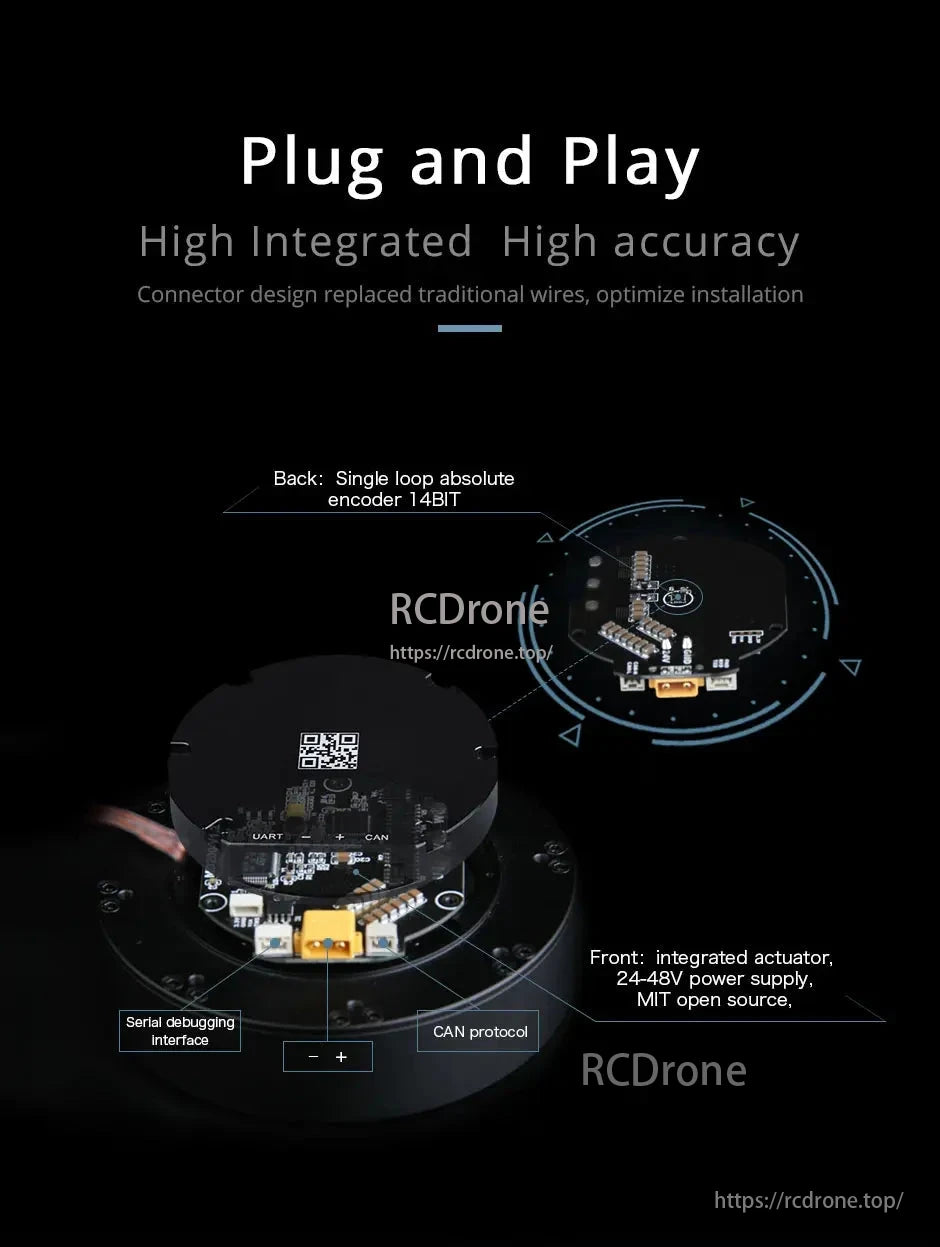
即插即用,高度集成,準確的機器人模組,配備單圈編碼器、集成執行器、24-48V 電源、CAN 協議和串行調試。






