






CubeMars AKA10-9 KV60 機器人執行器 – 18Nm、48V、高徑向負載、9:1 減速比
CubeMars AKA10-9 KV60 機器人執行器 – 18Nm、48V、高徑向負載、9:1 減速比
CubeMars
無法載入取貨服務供應情況
概述
The CubeMars AKA10-9 KV60 機器人驅動器是一款高性能的準直接驅動模組,專為 自動導引車、輪式機器人及其他需要高扭矩和堅固徑向負載能力的移動平台而設計。該驅動器具有 9:1 行星齒輪減速、18Nm 額定扭矩,以及 高達 53Nm 的峰值扭矩,旨在提供工業級的精確度和可靠性。與之前的 AK10-9 型號相比,AKA10-9 在徑向負載方面提供了 120% 的提升,達到 50kg,大大增強了耐用性和使用壽命。
該模組包括 FOC 控制、磁性 16 位編碼器,以及新的 集成 2+5PIN 插頭設計,以確保安全和簡化接線。具備 一鍵設置、電機參數識別,且無需固件導入,支持輕鬆調試和快速部署。
主要特點
-
高扭矩輸出: 18Nm 額定,53Nm 峰值
-
寬廣的工作電壓: 兼容 48V 系統
-
高徑向負載: 50kg 徑向負載,比 AK10-9 強 120%
-
集成行星齒輪箱: 9:1 減速比,輸出平穩
-
自訂插頭設計: 2+5PIN 插頭,帶螺絲鎖定,提供更安全可靠的連接
-
編碼器: 16位元磁性編碼器,提供高解析度位置反饋
-
低背隙與反驅動: 0.15° 背隙和 0.8Nm 反向驅動扭矩
-
先進的 FOC 控制: 確保精確的速度和扭矩控制
規格
機械與一般
| 參數 | 數值 |
|---|---|
| 應用 | AGV, 輪式機器人 |
| 驅動方式 | FOC |
| 齒輪比 | 9:1 |
| 徑向負載 | 50kg |
| 間隙 | 0.15° |
| 反向驅動扭矩 | 0.8Nm |
| 溫度範圍 | -20℃ 至 50℃ |
| 重量 | 1060g |
| 極對數 | 21 |
| 相位 | 3 |
| 繞組類型 | 星形 |
| 絕緣等級 | C |
| 絕緣電壓 | 1000V 5mA/2s |
| 絕緣電阻 | 1000V 10MΩ |
| 噪音(65cm距離) | 50dB |
| 溫度傳感器 | NTC MF51B 103F3950 |
電氣參數
| 參數 | 值 |
|---|---|
| 額定電壓 | 48V |
| 空載轉速 | 280rpm |
| 額定速度 | 109轉/分鐘 |
| 額定扭矩 | 18牛頓米 |
| 峰值扭矩 | 53牛頓米 |
| 額定電流 | 10。6A |
| 峰值電流 | 32A |
| 慣性 | 1002g·cm² |
| Kv | 60rpm/V |
| Kt | 0.16Nm/A |
| Km | 0.32Nm/√W |
| Ke | 0.0167V/krpm |
| 相電阻 | 248mΩ |
| 相電感 | 235μH |
| 電氣時間常數 | 0.94ms |
| 機械時間常數 | 1.90ms |
| 最大扭矩重量比 | 53Nm/kg |
接線說明
-
編碼器類型: 磁性
-
編碼器解析度: 16位元
-
連接器: CTZ-5-22 母2+5PIN插頭
-
接線佈局:
-
紅色: V+
-
黑色 (x2): V-, GND
-
黃色: RX
-
綠色: TX
-
白色: CAN_H
-
藍色: CAN_L
-
性能圖 (AKA10-9 KV60 @ 48VDC)
-
展示輸出功率、效率、速度以及電流與扭矩的關係。
-
最大效率觀察於約15Nm扭矩
-
穩定輸出高達53Nm峰值扭矩
應用
-
自主導引車輛 (AGV)
-
服務或物流輪式機器人
-
醫療運輸或檢查機器人
-
需要緊湊高扭矩驅動的移動平台
增強耐用性與除錯
AKA10-9 KV60具備一個全新結構設計以應對更高的徑向力,非常適合偏心負載的應用。透過一鍵馬達參數識別、UART波特率配置及參數更新,除錯過程簡化—無需固件導入。
手動下載
詳情
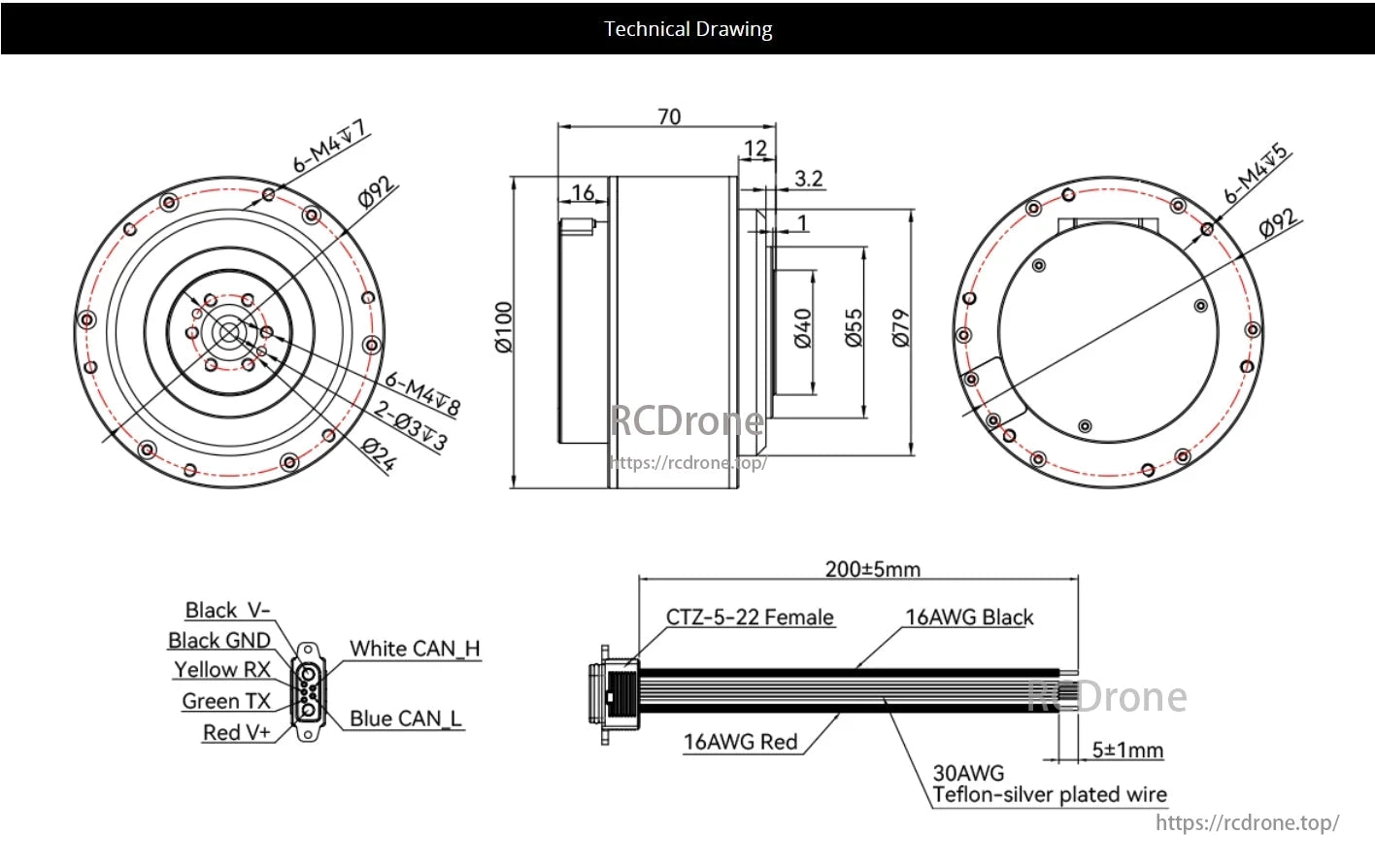
CubeMars AKA10-9 機器人驅動器尺寸:100x70mm,配有6個M4螺絲。特點包括CTZ-5-22母接頭,16AWG黑/紅線,和30AWG特氟龍銀鍍線。包括CAN_H/L,RX/TX引腳。

CubeMars AKA10-9 機器人驅動器:48V,18Nm扭矩,109rpm速度,53Nm峰值扭矩。絕緣等級C,-20°C至50°C操作,1060g重量,磁性編碼器,16位分辨率。
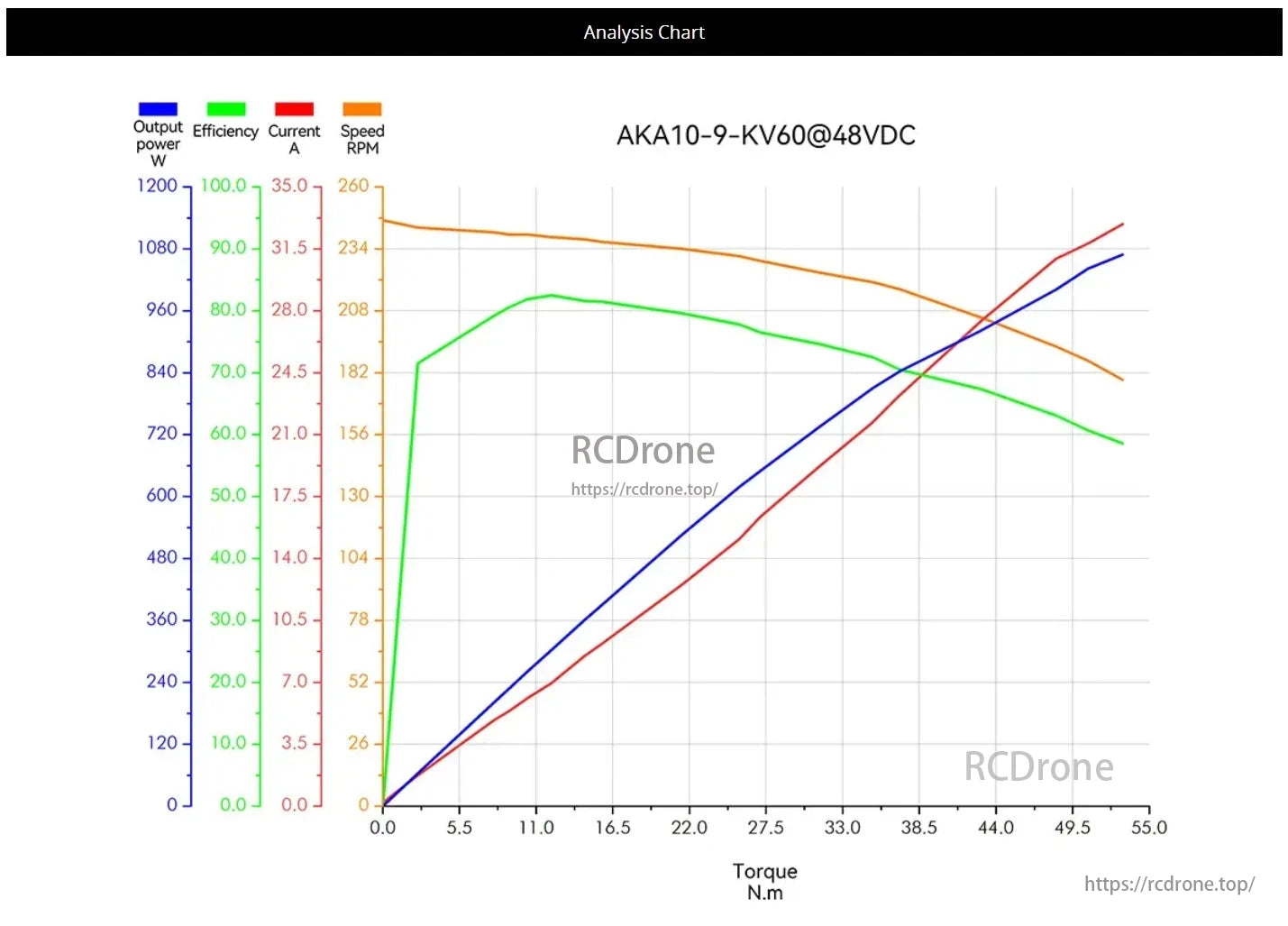
AKK10-9 機器人驅動器分析圖顯示在48VDC下的輸出功率、效率、電流和速度與扭矩的關係,展示了在不同扭矩下的性能。

CubeMars AKA10-9 機器人驅動器:具有高徑向負載能力的全新解決方案,設計堅固耐用。

全新設計將徑向負載能力提升至50KG,較AK10-9提升120%。

自定義插頭將電源、CAN、UART信號整合為2+5針設計,使用M2螺絲固定以確保安全和可靠性。
升級驅動器以便於調試。一鍵設置,開放參數,無縫更新電機。






