





CubeMars R80 KV110 馬達 48V 三相 FOC 含霍爾感測器,外骨骼 & 機器人驅動
CubeMars R80 KV110 馬達 48V 三相 FOC 含霍爾感測器,外骨骼 & 機器人驅動
CubeMars
定價
$369.00 USD
定價
售價
$369.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
CubeMars R80 KV110 馬達是一款三相馬達,旨在用於外骨骼和機器人驅動應用,具備集成霍爾傳感器和支持FOC(場導向控制)。它具有特殊的散熱設計和連接器式介面,以簡化安裝。
主要特點
- 集成霍爾傳感器
- 電角度精度偏差:±10°
- 特殊散熱設計(超薄底座 & 高導熱矽膠墊;減少整體長度以改善散熱)
- 齒輪箱安裝的圖案孔設計(諧波齒輪箱、法蘭或其他齒輪箱類型)
- 連接器設計以便於安裝(取代傳統電線)
- 提供分析電機運行圖(速度與扭矩在48V下;非運行/短期運行/持續運行區域)
規格
| 應用 | 外骨骼 |
| 驅動方式 | FOC |
| 操作環境溫度 | -20℃~50℃ |
| 繞組類型 | 三角形 |
| 絕緣等級 | H |
| 絕緣高壓 | 1000V 5mA/2s |
| 絕緣電阻 | 1000V10MΩ |
| 相位 | 3 |
| 極對數 | 21 |
| 額定電壓 (V) | 48 |
| 空載轉速 (rpm) | 4320 |
| 額定扭矩 (Nm) | 1.3 |
| 額定轉速 (rpm) | 3580 |
| 額定電流 (ADC) | 12.3 |
| 峰值扭矩 (Nm) | 4 |
| 峰值電流 (ADC) | 38.6 |
| Kv (rpm/V) | 90 |
| Kt (Nm/A) | 0.107 |
| Ke (V/krpm) | 10.58 |
| 相對相電阻 (mΩ) | 125 |
| 相對相電感 (μH) | 87 |
| 慣性 (gcm²) | 759.98 |
| Km (Nm/√W) | 0.3026 |
| 機械時間常數 (ms) | 0.83 |
| 電氣時間常數 (ms) | 0.70 |
| 重量 (克) | 354 |
| 最大扭矩重量比 (Nm/kg) | 11.3 |
| 電機相位 U V W | 參考工程圖 |
| 霍爾傳感器端口 | VCC, GND, Hu, Hv, HW (參考工程圖) |
| 對應關係 | Hu-U; Hv-V; Hw-W |
應用
- 類人機器人
- 機器手臂
- 外骨骼
- 四足機器人
- AGV 車輛
- ARU 機器人
手冊 / 文件
如需接線/驅動器選擇問題或文件幫助,請通過 https://rcdrone.top/ 聯繫支持或發送電子郵件至 [email protected].
根據提供的圖表說明:所有數據僅供參考 | 可能隨時更改,恕不另行通知。
詳細資訊

CubeMars R80 KV110 專為緊湊型機器人關節和外骨骼驅動設計,具有低剖面執行器風格的外形因素。

集成霍爾傳感器提供轉子位置反饋,以實現穩定的FOC控制,電氣角度精度偏差為±10°。

特殊的散熱設計使用超薄底座和高導熱硅膠墊,幫助在緊湊型構建中管理溫度。

鐘形上的圖案安裝孔簡化了附加諧波齒輪箱、法蘭或其他類型齒輪箱的過程。
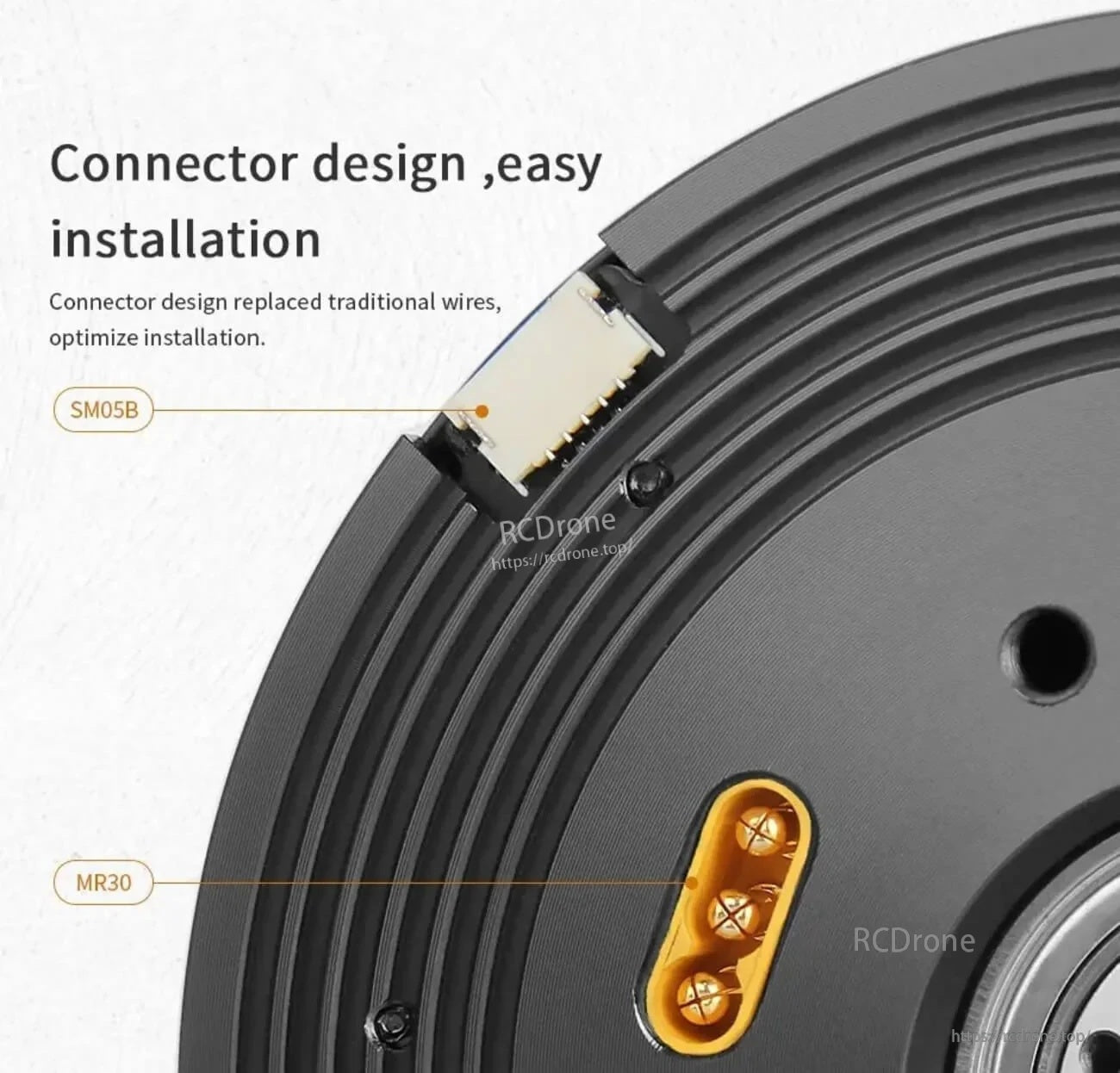
連接器式接線取代了傳統的鬆散導線,實現更乾淨、更快速的電源和傳感器連接安裝。
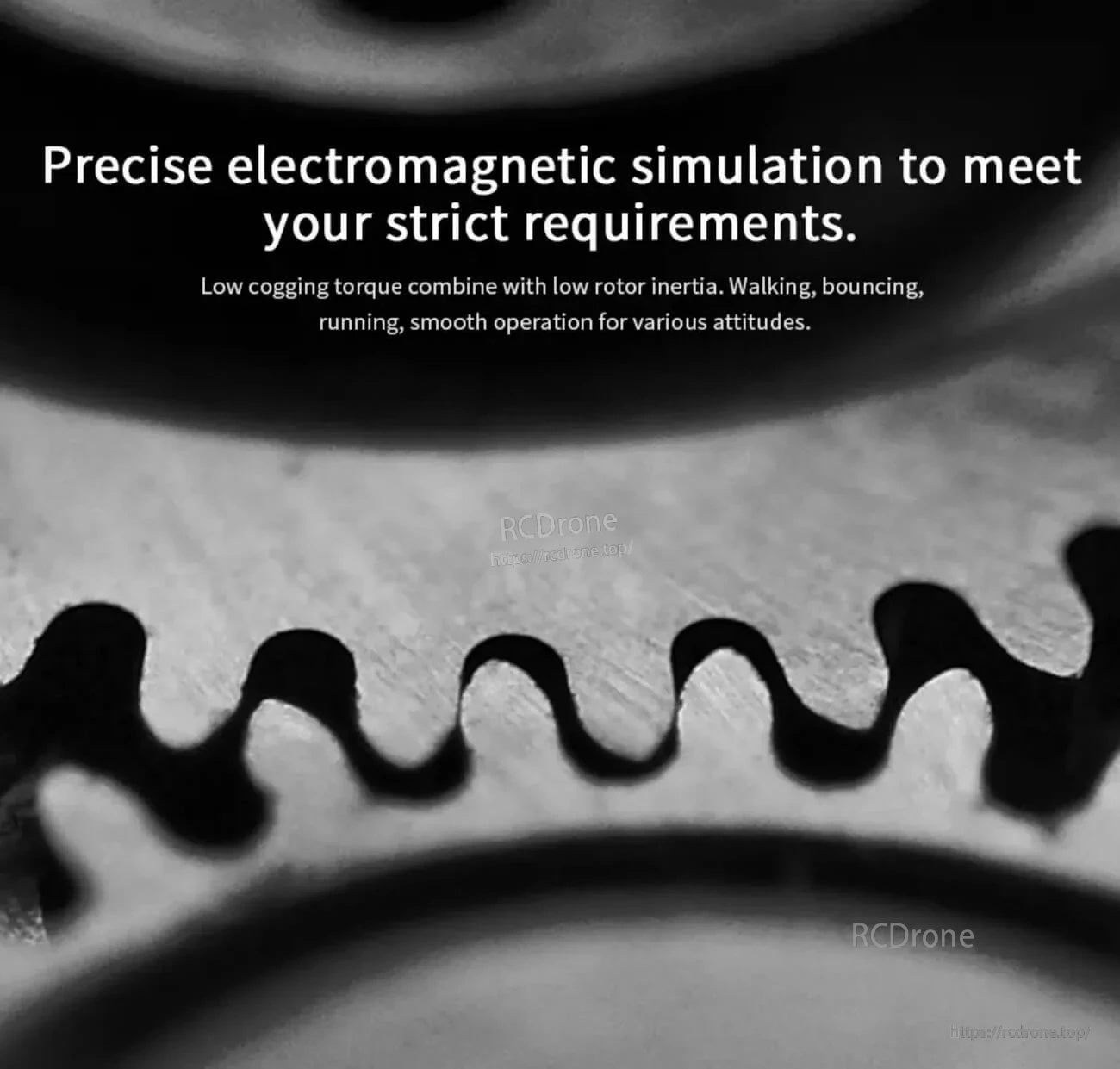
優化的電磁設計針對低齒槽扭矩和低轉子慣性,以實現更平滑的運動控制。

專為重載腿部機器人和其他高扭矩關節應用設計,穩定輸出至關重要。

48V速度與扭矩操作圖表有助於選擇安全的連續範圍並了解短期峰值能力。





