DarwinFPV GM8 防干擾無人機 GPS 模組 - UBLOX GPS/GLONASS,10Hz,5V,MX1.25-4
DarwinFPV GM8 防干擾無人機 GPS 模組 - UBLOX GPS/GLONASS,10Hz,5V,MX1.25-4
DarwinFPV
定價
$18.99 USD
定價
售價
$18.99 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
DarwinFPV抗干擾無人機GPS(GM8)是一款基於空中無人機GPS硬體解決方案的無人機GPS模組,使用多頻強干擾消除技術和多徑信號檢測及消除技術,以實現更穩定和可靠的定位。其通信協議經過修改,以兼容BetaFlight,使其適用於需要穩定GPS性能的FPV無人機。
主要特點
- 多頻率強干擾消除技術和多路徑信號檢測及消除技術以提高穩定性
- 高增益全向貼片天線以獲得更穩定的信號接收
- 兼容BetaFlight的通信協議(UBLOX)
- 支持GPS/GLONASS
規格
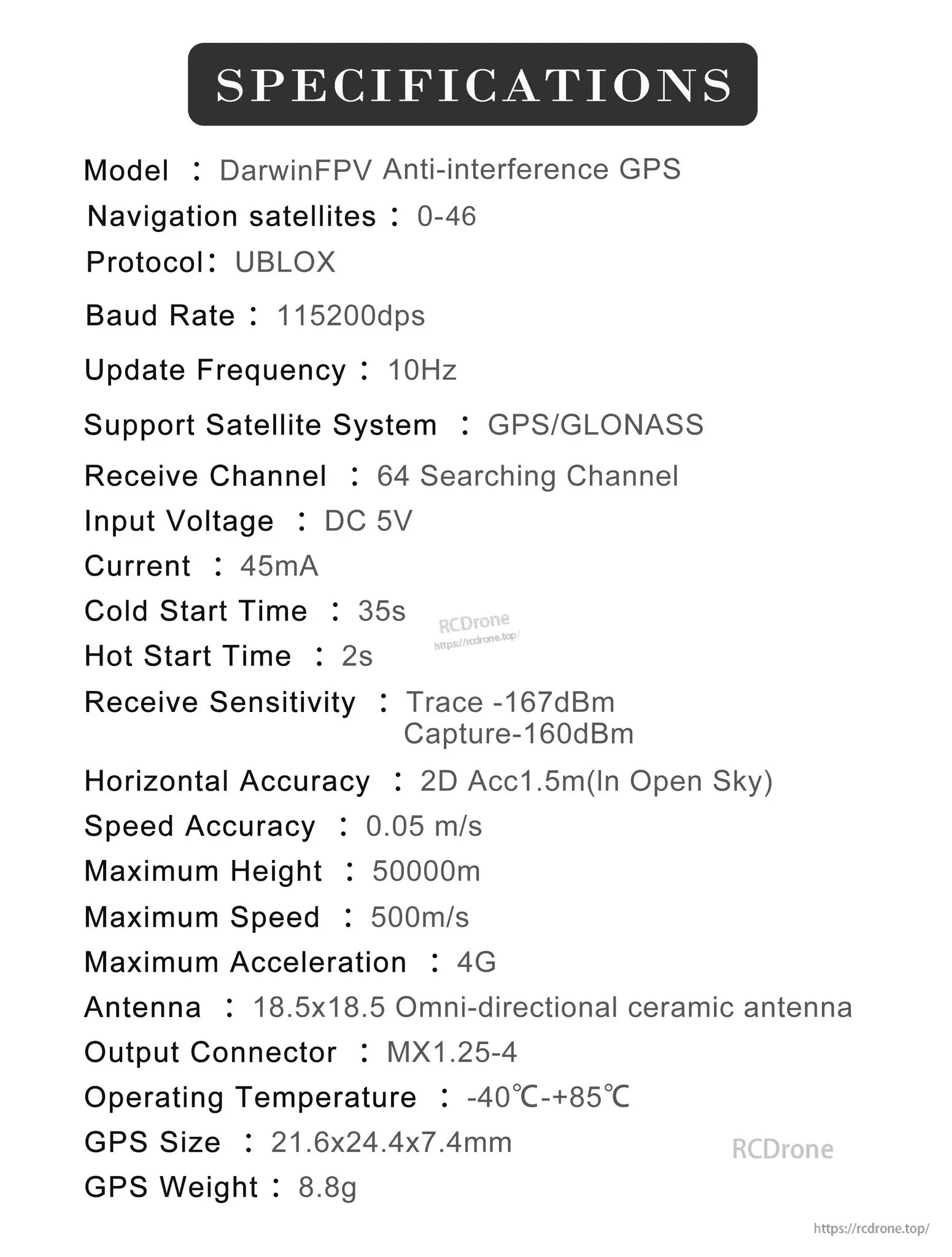
| 型號 | DarwinFPV抗干擾GPS |
| 導航衛星 | 0-46 |
| 協議 | UBLOX |
| 波特率 | 115200dps |
| 更新頻率 | 10Hz |
| 支持衛星系統 | GPS/GLONASS |
| 接收通道 | 64個搜索通道 |
| 輸入電壓 | DC 5V |
| 電流 | 45mA |
| 冷啟動時間 | 35秒 |
| 熱啟動時間 | 2秒 |
| 接收靈敏度 | 追蹤 -167dBm; 捕獲 -160dBm |
| 水平精度 | 2D 精度15米(在開放天空中) |
| 速度精度 | 0.05米/秒 |
| 最大高度 | 50000米 |
| 最大速度 | 500米/秒 |
| 最大加速度 | 4G |
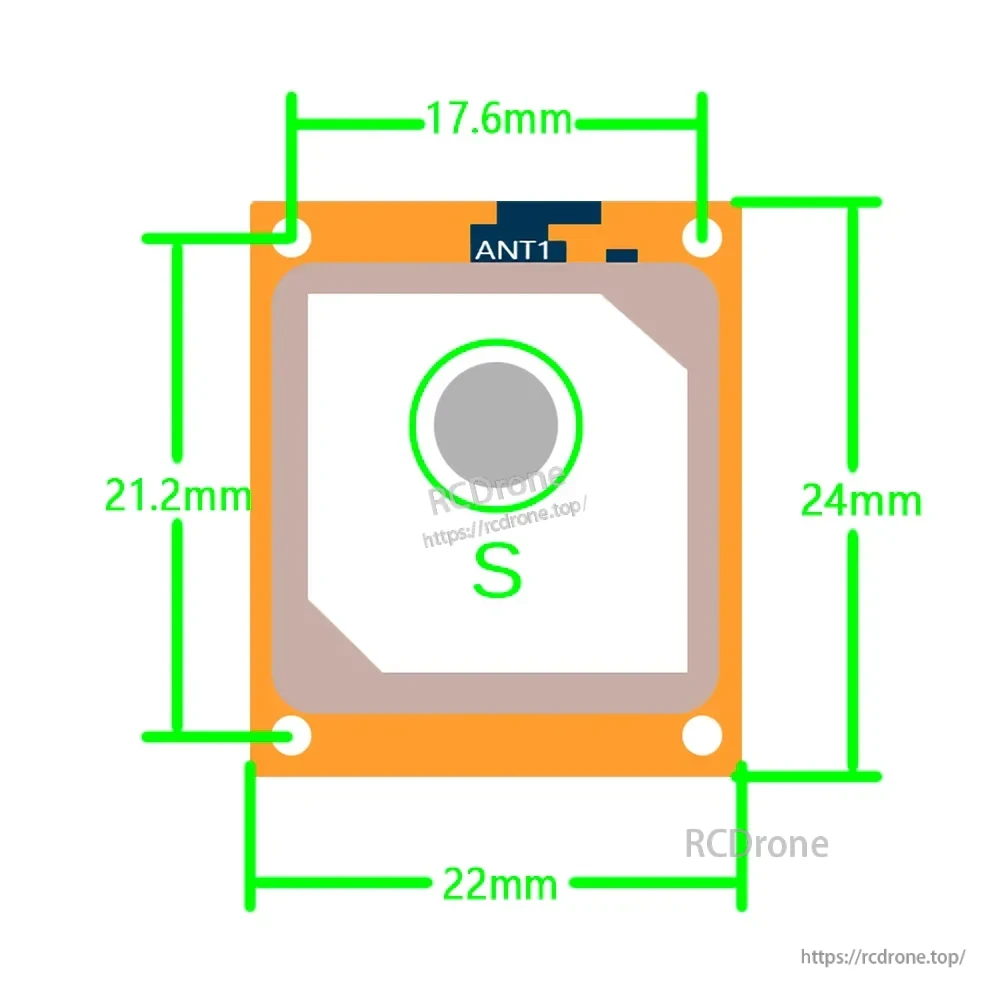
| 天線 | 18.5x18.5全向陶瓷天線 |
| 輸出連接器 | MX1.25-4 |
| 操作溫度 | -40°C-+85°C |
| GPS尺寸 | 21.6x24.4x7.4毫米 |
| GPS重量 | 8.8克 |
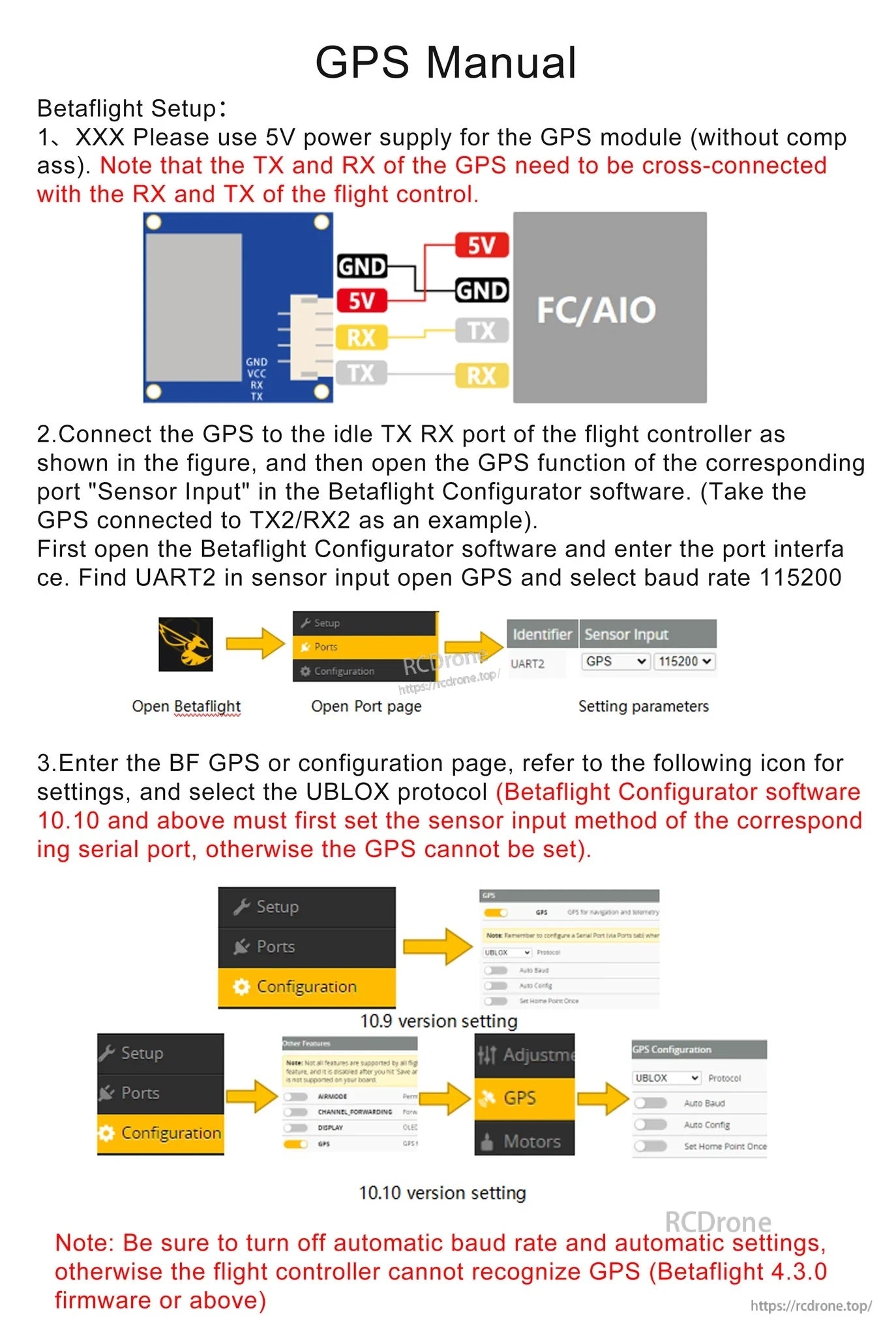
設置說明(BetaFlight / INAV)
- 為GPS模組使用5V電源。
- TX和RX必須在GPS和飛行控制器之間交叉連接(GPS TX到FC RX,GPS RX到FC TX)。
- 在 BetaFlight 配置器 / INAV 配置器中,啟用所選串口上的 GPS(示例顯示:TX2/RX2),並將波特率設置為 115200。
- 選擇 UBLOX 作為 GPS 協議。
- 如果飛行控制器無法識別 GPS,請關閉自動波特率和自動設置(適用於 BetaFlight 4.3.0 固件或更高版本)。
- 請勿在室內搜索 GPS 定位衛星;在戶外開放區域進行測試。
包裝內容
- 1 x DarwinFPV GM8 抗干擾無人機 GPS
- 1 x MX1.25_6P 到 SH1.0_4P 連接線
- 1 x 貼紙
如需安裝或配置幫助,請聯繫 [email protected] or 訪問 https://rcdrone.top/ .
詳情
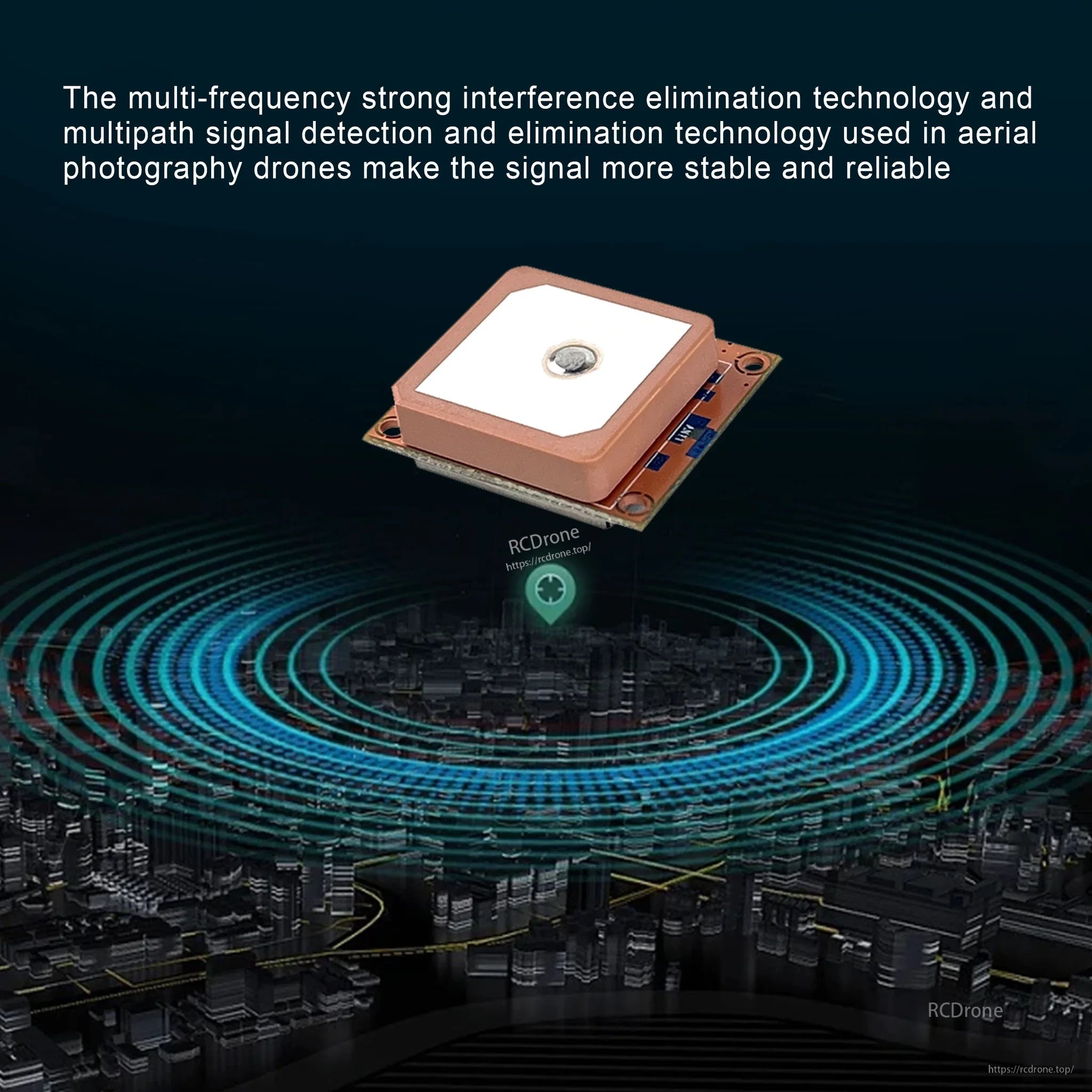
多頻干擾過濾有助於在挑戰性的 RF 環境中保持更穩定的 GPS 鎖定,以便進行 FPV 飛行。

高增益陶瓷貼片天線在飛行過程中支持更穩定的衛星接收。


關鍵規格列出以便快速設置計劃,包括UBLOX協議、115200波特率和10Hz更新。
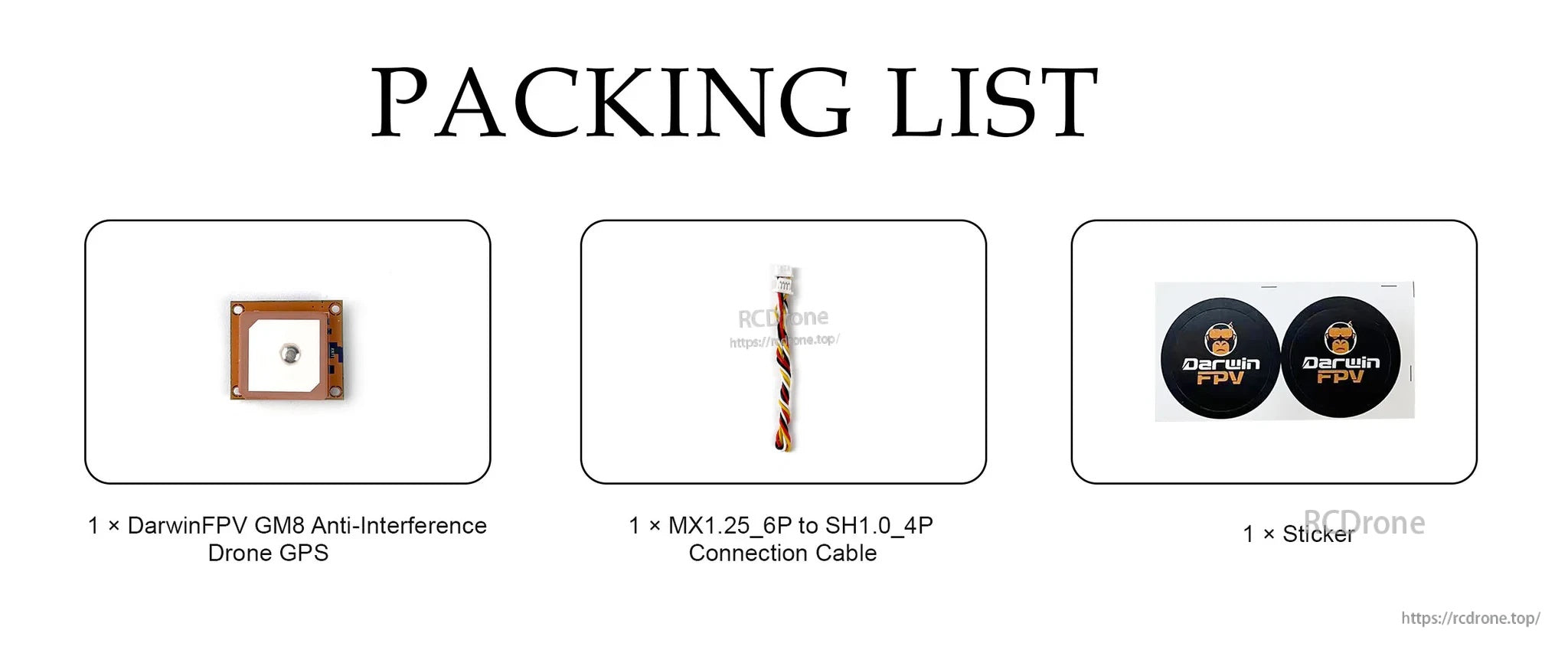
包裝內包含GM8 GPS模組以及一條與常見飛行控制器端口匹配的連接電纜。
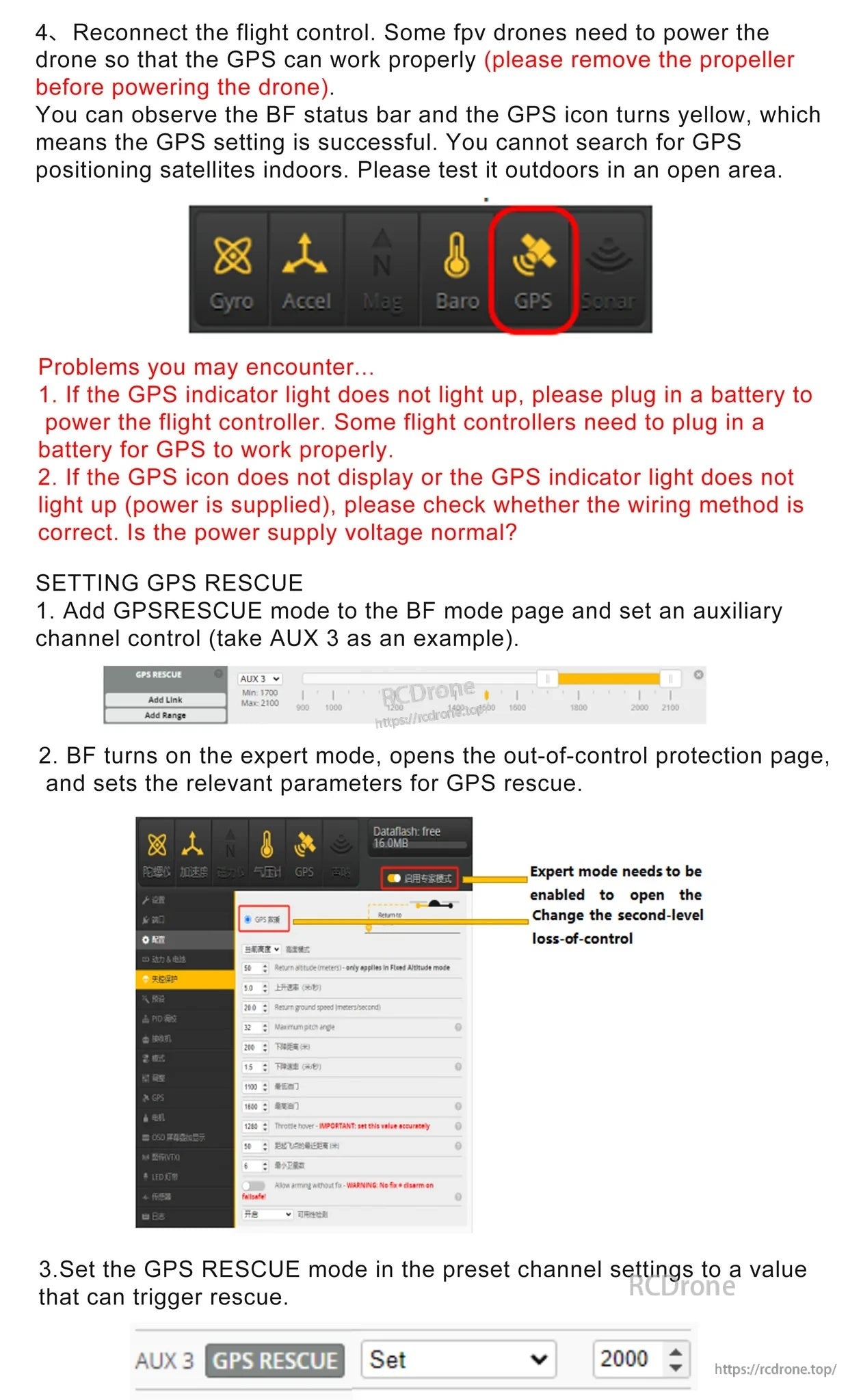
BetaFlight註解涵蓋了常見的故障排除步驟和在模組接線並被檢測後的GPS救援設置。